
പാഠം 4: വാൾ മെയ്സ് ചലഞ്ച്
ഈ യൂണിറ്റിലെ മുൻ പാഠങ്ങളിൽ, വാൾ മെയ്സ് പ്ലേഗ്രൗണ്ട്ലെ ചില പ്രദേശങ്ങളിലേക്ക് നാവിഗേറ്റ് ചെയ്യുന്നതിന് ഡിസ്റ്റൻസ് സെൻസർ എങ്ങനെ ഉപയോഗിക്കാമെന്ന് നിങ്ങൾ പഠിച്ചു. മുൻ യൂണിറ്റിൽ, ബമ്പർ സെൻസറുകൾ ഉപയോഗിച്ച് നിങ്ങൾ വാൾ മെയ്സ് ചലഞ്ച് പരിഹരിച്ചു. ഇനി, ഈ ആശയങ്ങളെല്ലാം സംയോജിപ്പിച്ച് വാൾ മെയ്സ് ചലഞ്ച് തുടക്കം മുതൽ അവസാനം വരെ പരിഹരിക്കുന്നതിനുള്ള ഒരു പ്രോജക്റ്റ് സൃഷ്ടിക്കും, പക്ഷേ ഇത്തവണ ഡിസ്റ്റൻസ് സെൻസർ ഉപയോഗിച്ച്!
പഠന ഫലം
- ഡിസ്റ്റൻസ് സെൻസർ ഉപയോഗിച്ച് വാൾ മേസിൽ വിജയകരമായി നാവിഗേറ്റ് ചെയ്യുന്നതിന്, ഡ്രൈവ്ട്രെയിൻ, സെൻസിംഗ്, കൺട്രോൾ വിഭാഗങ്ങളിൽ നിന്നുള്ള കമാൻഡുകൾ ശരിയായ ക്രമത്തിൽ പ്രയോഗിക്കുക.
എല്ലാം ഒരുമിച്ച് ചേർക്കൽ
മുൻ യൂണിറ്റിൽ, ബമ്പർ സെൻസർ ഉപയോഗിച്ച് നിങ്ങൾ വാൾ മെയ്സ് പരിഹരിച്ചു. ഈ യൂണിറ്റിൽ, നിങ്ങൾ അതേ വാൾ മെയ്സ് പരിഹരിക്കും, പകരം ഡിസ്റ്റൻസ് സെൻസർ ഉപയോഗിക്കുക. വാൾ മെയ്സ് ചലഞ്ച് രണ്ട് സെൻസറുകൾ ഉപയോഗിച്ചും പരിഹരിക്കാൻ കഴിയും, എന്നാൽ ഓരോന്നിനും ഗുണങ്ങളുണ്ട്.
| ഓരോ സെൻസറിന്റെയും ഗുണങ്ങൾ | |
|---|---|
|
ബമ്പർ സെൻസർ
|
ദൂര സെൻസർ
|
വാൾ മെയ്സ് ചലഞ്ച്
ഈ വെല്ലുവിളിയിൽ, ഡിസ്റ്റൻസ് സെൻസർ ഉപയോഗിച്ച് VR റോബോട്ട് വാൾ മെയ്സ് പ്ലേഗ്രൗണ്ട് തുടക്കം മുതൽ അവസാനം വരെ നാവിഗേറ്റ് ചെയ്യുന്ന ഒരു പ്രോജക്റ്റ് സൃഷ്ടിക്കുക.
വെല്ലുവിളി പൂർത്തിയാക്കാൻ ഈ ഘട്ടങ്ങൾ പാലിക്കുക:
- വെല്ലുവിളി പൂർത്തിയാക്കാൻ VR റോബോട്ട് എങ്ങനെ ഡ്രൈവ് ചെയ്യണമെന്ന് കാണാൻ പരിഹാര വീഡിയോ കാണുക.
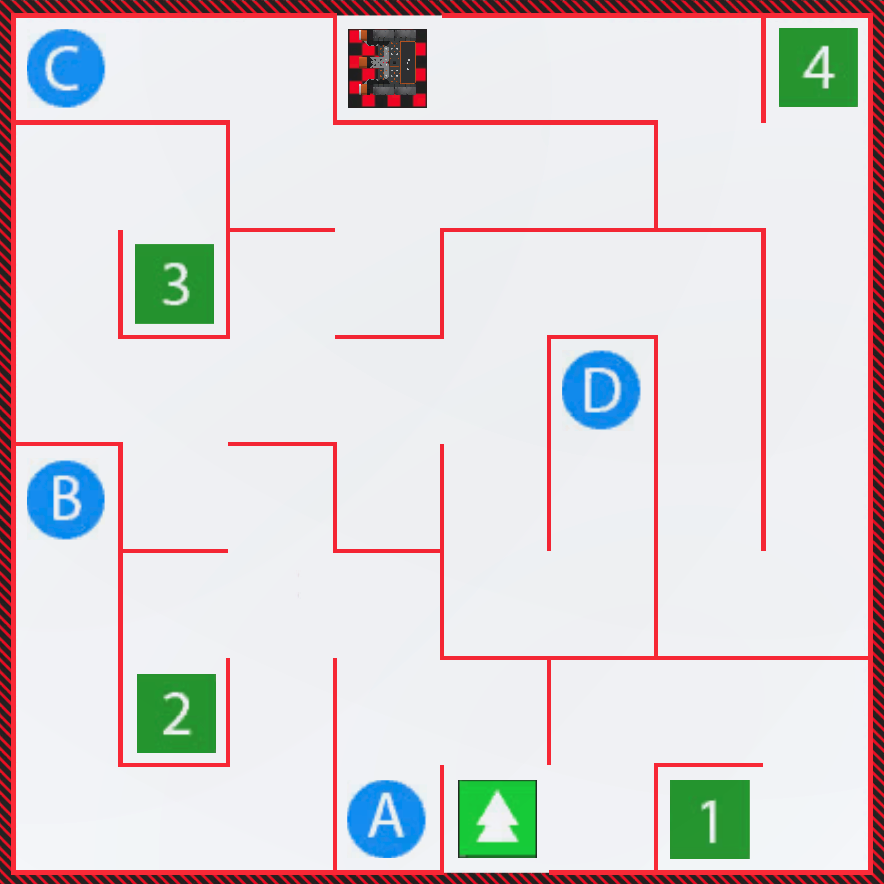
- താഴെയുള്ള വീഡിയോ ക്ലിപ്പിൽ, വിആർ റോബോട്ട് മുമ്പത്തെപ്പോലെ തന്നെ ഡ്രൈവിംഗ് ആരംഭിച്ച് മൂന്നാം സ്ഥാനത്തെത്തി. റോബോട്ട് ഭിത്തിയിലേക്ക് അഭിമുഖമായി നിൽക്കുമ്പോൾ, അതിന്റെ പിന്നിൽ 3 എന്ന നമ്പർ ഉള്ളപ്പോൾ, റോബോട്ട് വലത്തേക്ക് തിരിയുകയും മസിലുകളുടെ വലതുവശത്തേക്ക് പോകുകയും ചെയ്യുന്നു. അത് D എന്ന അക്ഷരത്തെ ചുറ്റിപ്പറ്റിയുള്ള മതിലുകളിലേക്ക് മുന്നോട്ട് നീങ്ങുന്നു. റോബോട്ട് ഇടത്തേക്ക് നീങ്ങുന്നു, തുടർന്ന് മുന്നോട്ട് നീങ്ങി വലത്തേക്ക് തിരിയുന്നു, വ്യക്തമായ പാതയിൽ തന്നെ തുടരും. അടുത്ത ഭിത്തിയിൽ, റോബോട്ട് ഇടത്തേക്ക് തിരിഞ്ഞ് ഇടതുവശത്തെ ഭിത്തിയിലൂടെയുള്ള പാത പിന്തുടരാൻ രണ്ടുതവണ മുന്നോട്ട് ഓടുന്നു. മുകളിൽ വലത് മൂലയിലെ ഭിത്തിയിൽ നിന്ന് ഏകദേശം 300 മില്ലിമീറ്റർ അകലെ റോബോട്ട് നിർത്തി, ഇടത്തേക്ക് തിരിഞ്ഞ് ഫിനിഷിംഗ് സ്ഥാനത്തെത്തുന്നതിന് രണ്ടുതവണ മുന്നോട്ട് ഓടിക്കുന്നു.
- ഒരു പുതിയ പ്രോജക്റ്റ് സൃഷ്ടിക്കുക അല്ലെങ്കിൽ ഈ യൂണിറ്റിലെ മുൻ പാഠങ്ങളിൽ നിന്ന് ഒരു പ്രോജക്റ്റ് ലോഡ് ചെയ്യുക. ഒരു പുതിയ പ്രോജക്റ്റ് സൃഷ്ടിക്കുകയാണെങ്കിൽ, ആവശ്യപ്പെടുമ്പോൾവാൾ മേസ് പ്ലേഗ്രൗണ്ട്തിരഞ്ഞെടുക്കുക.
- പ്രോജക്റ്റിന്റെ പേര് മാറ്റുക യൂണിറ്റ്5വെല്ലുവിളി.
- പ്ലേഗ്രൗണ്ട് വിൻഡോ തുറന്നിട്ടില്ലെങ്കിൽ അത് തുറക്കുക. വാൾ മെയ്സ് പ്ലേഗ്രൗണ്ട്തുറക്കുന്നുണ്ടെന്ന് ഉറപ്പാക്കുക.
- വാൾ മെയ്സിന്റെ തുടക്കം മുതൽ അവസാനം വരെ VR റോബോട്ടിനെ നാവിഗേറ്റ് ചെയ്യുന്നതിന് ആവശ്യമായ കമാൻഡുകൾ ചേർക്കുക.
- അത് പ്രവർത്തിക്കുന്നുണ്ടോ എന്ന് പരിശോധിക്കാൻ പ്രോജക്റ്റ് ആരംഭിക്കുക.
- പ്രോജക്റ്റ് വിജയിച്ചില്ലെങ്കിൽ, എഡിറ്റ് ചെയ്ത് വീണ്ടും ശ്രമിക്കുക. വിആർ റോബോട്ട് തുടക്കം മുതൽ അവസാനം വരെ വിജയകരമായി ഓടുന്നത് വരെ പ്രോജക്റ്റ് പരിഷ്കരിച്ച് പ്രവർത്തിപ്പിക്കുന്നത് തുടരുക.
- വിആർ റോബോട്ട് വിജയകരമായി അവസാനത്തിലേക്ക് നീങ്ങിക്കഴിഞ്ഞാൽ പ്രോജക്റ്റ് സംരക്ഷിക്കുക.
അഭിനന്ദനങ്ങൾ! നിങ്ങൾ വാൾ മെയ്സ് ചലഞ്ച് വിജയകരമായി പൂർത്തിയാക്കി!
ചോദ്യങ്ങൾ
പാഠ ക്വിസ് ആക്സസ് ചെയ്യുന്നതിന് താഴെയുള്ള ലിങ്ക് തിരഞ്ഞെടുക്കുക.