
Programação Baseada em Eventos: Comunicação entre Blocos
![]() Caixa de ferramentas do professor
Caixa de ferramentas do professor
O objetivo da secção Repensar é que os alunos utilizem botões no Controlador utilizando programação baseada em eventos.
Esta secção inclui:
-
Visão geral da programação baseada em eventos
-
Exemplo de instruções de download do projeto & Visão geral
-
Atividades de remix:
-
Pegue num objeto!
-
Gemas coloridas
-
Corrida de estafetas!
-
-
Perguntas de remix
![]() Dicas para professores
Dicas para professores
- O Controlador pode ser emparelhado com o Cérebro Robô antes da aula para poupar tempo. Decida se pretende completar esta etapa ou se pretende que os alunos o façam. Siga os passos aqui. Pode imprimir este artigo para os alunos utilizarem, se quiser que emparelhem o controlador com o cérebro.
- A programação baseada em eventos dá ao Clawbot a capacidade de desencadear eventos ou reagir a gatilhos. Este tipo de programação permite que um bloco comunique com outros blocos.
Por outras palavras, o Clawbot responde aos movimentos dos Joysticks do Comando. O movimento do Joystick é o gatilho e o Clawbot responde de acordo
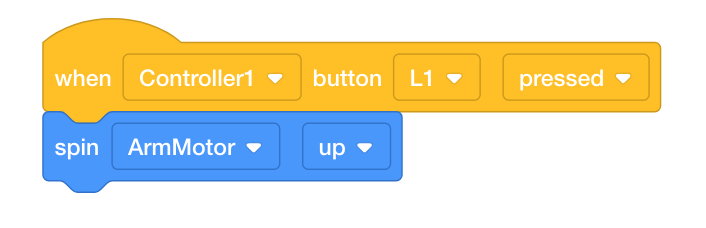
No exemplo acima, premir o botão L 1 é o gatilho que faz rodar o ArmMotor para cima. O bloco [when controller button] comunica esta mensagem ao bloco [spin] .
Para saber mais sobre os blocos, abra a informação Ajuda .

Programação baseada em eventos
Se o seu cão lhe traz a trela ou se se senta perto da porta, está a avisá-lo que precisa de sair. Na escola, quando o seu professor lhe faz uma pergunta e o vê levantar a mão, acredita que sabe a resposta e gostaria de responder à pergunta. Estes comportamentos são também conhecidos como “gatilhos”.
O seu cão sabe que trazer a trela até si ou sentar-se perto da porta é o gatilho que o avisa que precisa de sair. Depois, ao vê-lo sentado perto da porta com a coleira, reage ao gatilho levando-o para fora. Levantar a mão é o gatilho que permite ao professor saber que gostaria de responder à questão. O professor reage então ao gatilho chamando-o.
A programação baseada em eventos em robótica ocorre quando certos comportamentos do robô acionam o robô para fazer certas coisas ou reagir a certos gatilhos.
![]() Caixa de ferramentas do professor
-
Rever os blocos
Caixa de ferramentas do professor
-
Rever os blocos
- Peça aos alunos para abrirem o projeto de exemplo Clawbot Controller with Events no VEXcode V5.

- Como atividade de toda a turma, reveja os blocos de programação com os alunos. Diga aos alunos que vários eventos dentro do projeto Clawbot Control podem ser acionados ao mesmo tempo, permitindo-lhes controlar o movimento de condução do Clawbot, bem como o movimento do braço e da garra do Clawbot.
- Se os alunos precisarem de uma revisão rápida do VEXcode V5, poderão consultar os Tutoriais a qualquer momento durante esta investigação. Os Tutoriais estão localizados na barra de ferramentas. Os alunos podem rever como guardar, descarregar e executar um projeto, juntamente com outros itens, com os tutoriais.

Controlador: Clawbot Control
Agora, está pronto para descarregar o projeto de exemplo Clawbot Controller with Events e utilizar o Controller para operar o Clawbot, o seu braço e a sua garra, tudo ao mesmo tempo!

Certifique-se de que tem o hardware necessário e o seu caderno de engenharia. Abra o VEXcode V5.
| Quantidade | Materiais necessários |
|---|---|
| 1 |
Garrabot |
| 1 |
Bateria carregada do robô |
| 1 |
Rádio VEX V5 |
| 1 |
Controlador |
| 1 |
Cabo de amarração |
| 1 |
VEX código V5 |
| 1 |
Cabo USB (se utilizar um computador) |
| 1 |
Caderno de Engenharia |
Antes de iniciar a atividade...
Tem cada um destes itens prontos? O Construtor deve verificar cada um dos seguintes itens:
-
Todos os motores e sensores estão ligados à porta correta?
-
Os cabos inteligentes estão totalmente inseridos em todos os motores?
-
A bateria está totalmente carregada?
-
O Controlador está emparelhado com o Cérebro do Robot?