Remix Challenges: Clawbot Control - Python
Grab an object!
The goal of this activity is to grab and release an object with the Clawbot using the Controller.
Here are some steps to guide your group:
- Place your group’s object on the floor and make sure your Clawbot has enough space to move without interfering with other groups.
- List the steps the Clawbot will need to grab the object. Be sure to include which buttons you’ll use to accomplish this task!
- Write the steps the Driver lists in the engineering notebook.
-
Click the Download button in the Toolbar to download the Clawbot Control project to the Robot Brain.

-
Check to make sure your project has downloaded to the Clawbot’s Brain by looking at the Robot Brain’s screen. The project name, Clawbot Control, should be listed in slot 1.
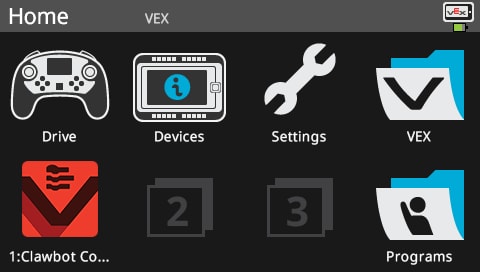
- Run the project on the Clawbot.
- Grab and release an object with the Clawbot using the Controller.
Congratulations! You have grabbed an object with your Clawbot using the Controller!
Were there any differences between your predictions and the actions you took during the activity? If so, add them to your engineering notebook.
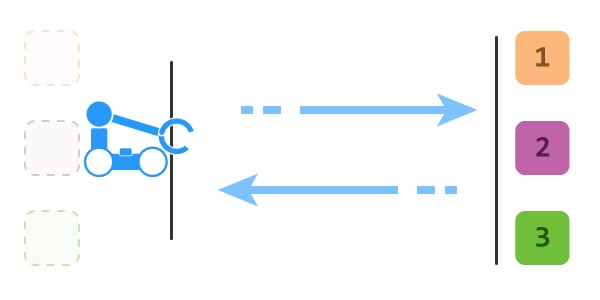
Colored Gems
The goal of this activity is to use your Clawbot skills to collect several objects, one at a time, and return them to a location faster than the other groups in your class. Good luck!
Here are some steps to guide your team:
- Move your group’s objects behind the object retrieval area your teacher has established, and make sure your Clawbot has space to move without interfering with other groups.
- List the steps the Clawbot will need to grab each object and return them to home base. Be sure to include which buttons you’ll use to accomplish this task!
- Write the steps the Driver lists in the engineering notebook.
- Using the classroom clock or a watch, keep time and record it in your engineering notebook.
- Retrieve each object as quickly as you can.
Congratulations! You have collected all three of your group’s objects, returned them to home base with your Clawbot using the Controller!
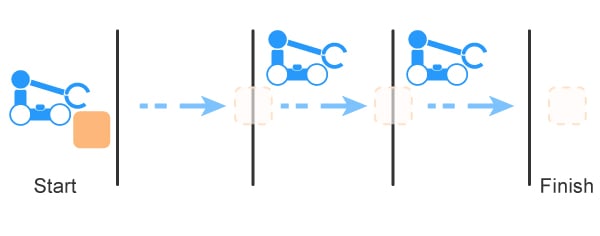
Relay Race!
The goal of this activity is to use your Clawbot and teamwork skills in a relay race. The group will be responsible for moving an object across a three meter course in the fastest time possible.
Player 1: Pick the object and carry it to the one meter line. Drop the object.
Player 2: Pick up the object and carry from the one to the two meter line. Drop the object.
Player 3: Pick up the object and carry from the two meter line to the finish line. Drop the object in the goal area.
Player 4: Monitor the time and ensure the Clawbot does not obstruct any other drivers or students. Ensure the robot places the object far enough over the line.