Desafio Robo Rally
Neste desafio, você precisa conduzir seu robô pelo seu hipódromo combinado com o percurso de outro indivíduo ou equipe! Para completar o desafio com sucesso, as equipes também devem criar um mapa em escala correta do novo curso combinado usando as dimensões e escalas dos alunos ou das equipes. Cada equipe do percurso combinado terá um Piloto que conduzirá o robô pelo percurso. A equipe com o Piloto que completar o percurso mais rápido vence!
Regras do desafio:
-
O robô deve começar e terminar na linha de chegada.
-
Ambas as equipes usarão o Drive Program no Robot Brain.
-
À medida que um membro da equipe dirige o robô, outros devem garantir que o robô não bata nas laterais do percurso ou perca o controle.
-
Você pode conduzir o robô pela pista de corrida uma vez como uma rodada de treino antes que o tempo seja registrado.
-
As dimensões de ambos os cursos deverão estar nas mesmas unidades e escala.
-
Cada equipe deverá preencher um novo mapa corretamente dimensionado, com medidas, baseado nos valores dos hipódromos combinados.
-
Qualquer equipe que conclua o mesmo percurso em menos tempo - vence!
-
Divirta-se!
![]() Dicas para professores
Dicas para professores
Certifique-se de que cada equipe tenha o controlador V5 devidamente emparelhado antes de executar o programa Drive.
![]() Caixa de ferramentas do professor
Caixa de ferramentas do professor
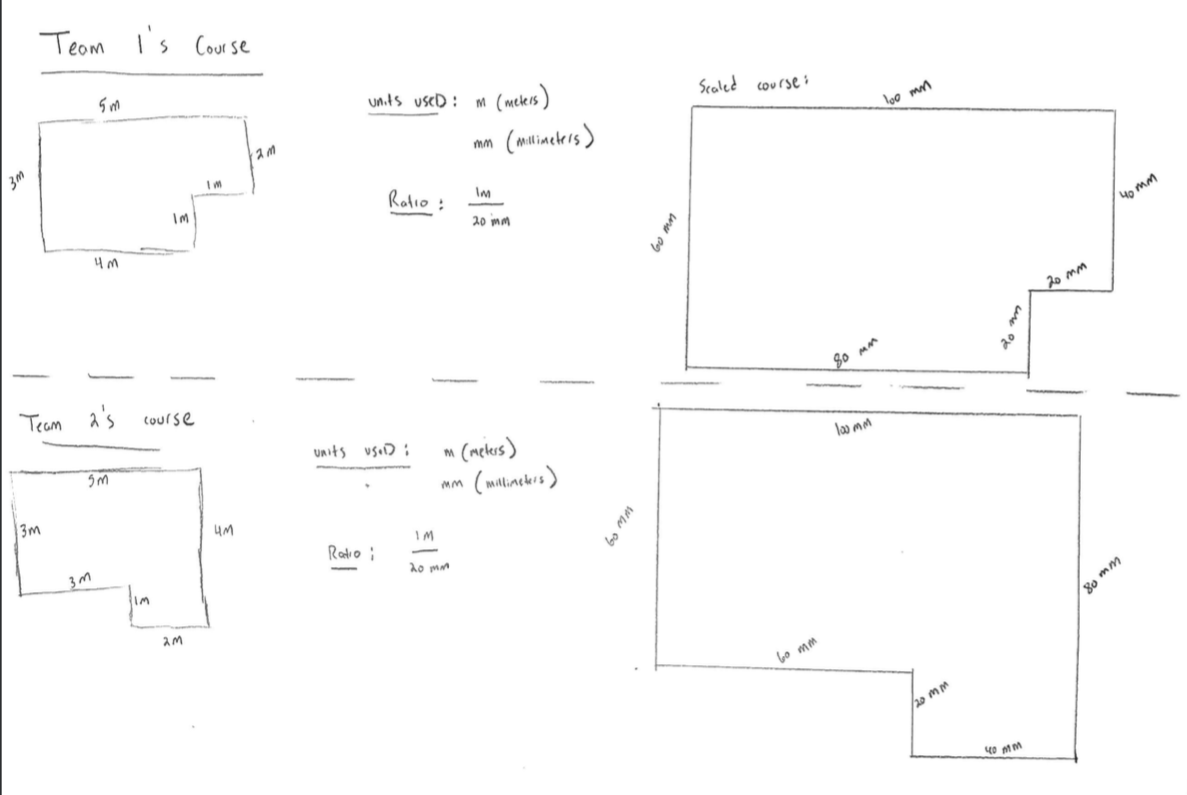
Uma possível solução poderia incluir o seguinte:
O topo da página mostra as dimensões reais do curso do grupo ou da equipe. O meio da página mostra quais unidades e proporções eles usaram para dimensionar. Isto é importante porque cada grupo terá que garantir que está usando as mesmas unidades e escala. Caso contrário, precisarão de alguns minutos para fazer as alterações necessárias para que fiquem nas mesmas unidades e usem a mesma escala.
A direita da página mostra as dimensões reduzidas do curso.
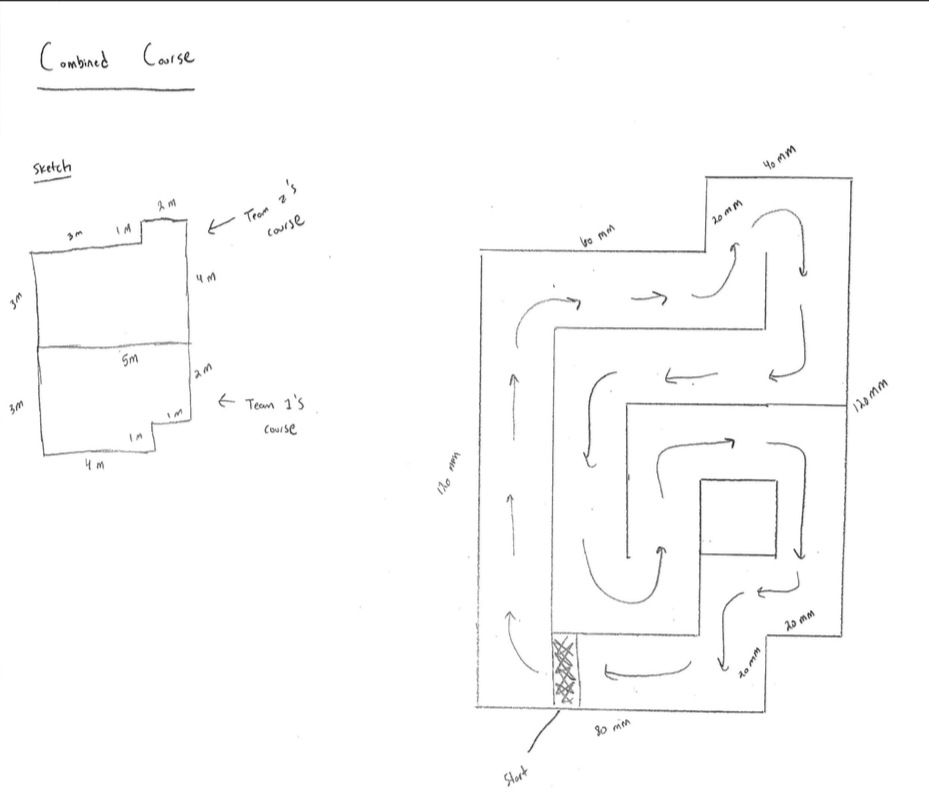
Na parte inferior, o curso combinado mostra como ambos os grupos decidiram combinar os seus cursos. Eles decidiram que, como ambos tinham um lado do percurso de 5 metros ou reduzido para 100 mm, eles traçariam o percurso do grupo ou da equipe 1 e, em seguida, conectariam o percurso da equipe ou do grupo 2 virando-o horizontalmente, de modo que o Lados de 100 mm foram combinados.
Os grupos então usaram o tamanho do Speedbot em escala reduzida para projetar como o robô deveria navegar no percurso usando setas e medições precisas.
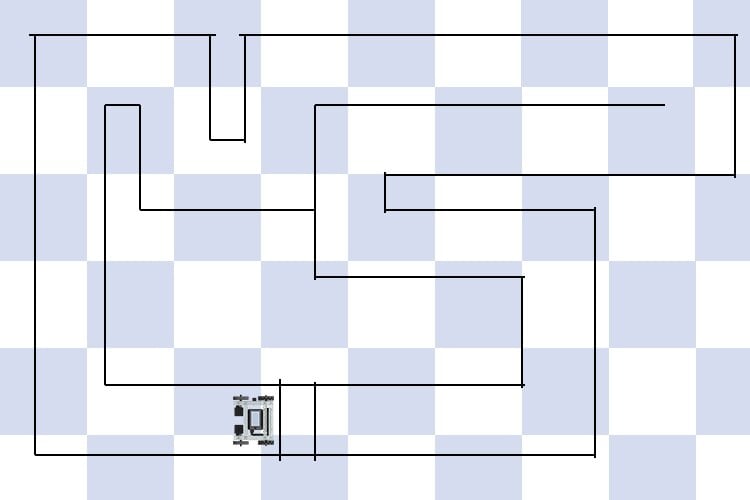
Os alunos então ampliaram seu desenho para que ficasse em tamanho real e o testaram para ver qual grupo navegou mais rápido!