Robo Rally Challenge
Robo Rally Challenge
In this challenge, you need to drive your robot through your racecourse combined with another individual or team's course! To successfully complete the challenge, teams must also create a correctly scaled map of the new combined course using the dimensions and scales from both students or teams. Each team from the combined course will have a Driver that will navigate the robot through the course. The team with the Driver who completes the course the fastest, wins!
Challenge rules:
- The robot must begin and end at the finish line.
- Both teams will use the Drive Program on the Robot Brain.
- As one team member drives the robot, others should ensure the robot is not hitting the sides of the course or losing control.
- You may drive the robot through the racecourse one time as a practice round before time is recorded.
- The dimensions of both courses must be in the same units and scale.
- Each team must complete a new correctly scaled map, with measurements, based on the values of the combined racecourses.
- Whichever team completes the same course in the shorter amount of time - wins!
- Have fun!
![]() Teacher Tips
Teacher Tips
Ensure that each team has the V5 Controller properly paired before running the Drive Program.
![]() Teacher Toolbox
Teacher Toolbox
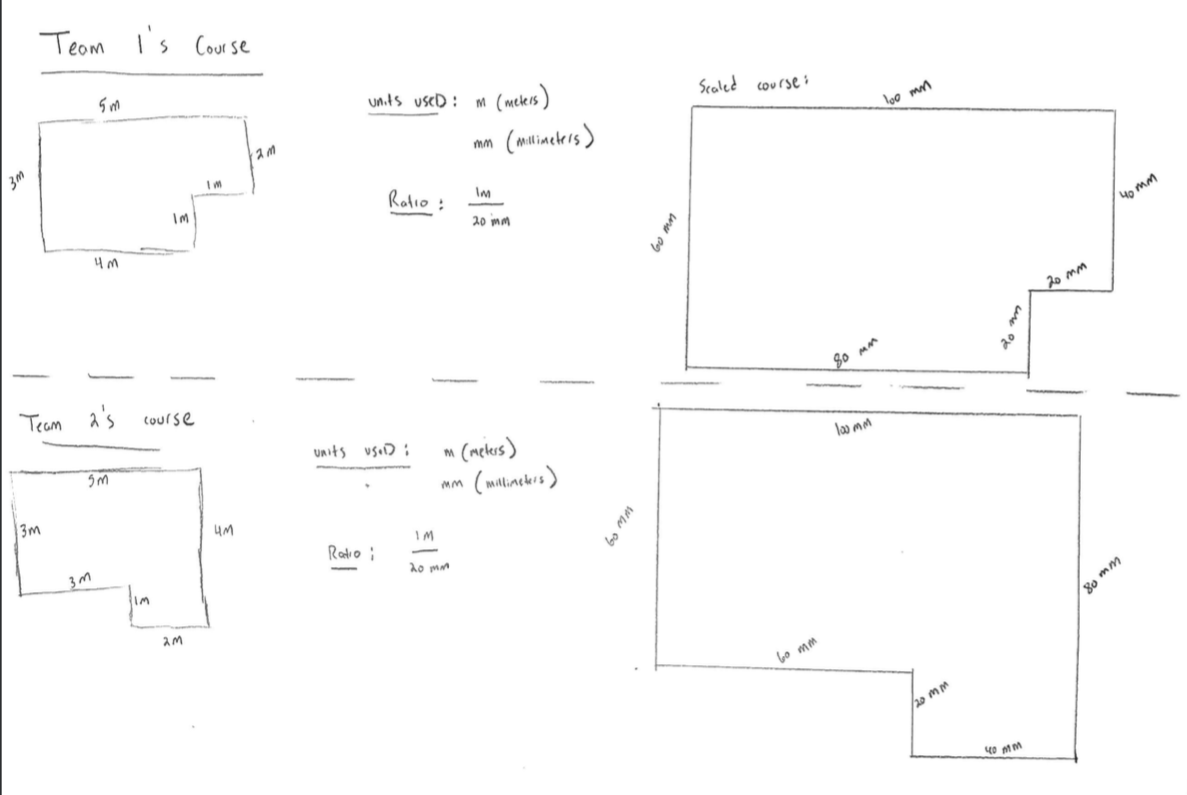
A possible solution could include the following:
The top of the page shows group or team's actual dimensions of their course. The middle of the page shows what units and ratio they used to scale. This is important because each group will have to ensure they are using the same units and scale. If they are not, they will need to take a few minutes to make the necessary changes so that they are in the same units and use the same scale.
The right of the page shows the scaled-down course dimensions.
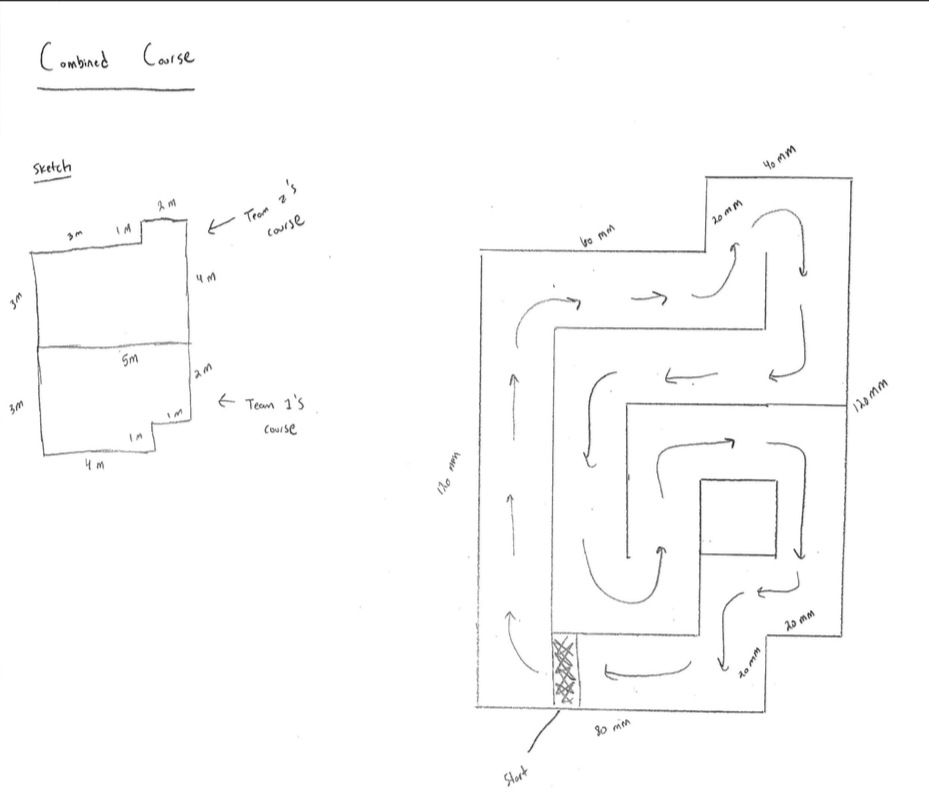
At the bottom, the combined course shows how both groups decided to combine their courses. They decided that since they both had one side of their course that was 5 meters or scaled-down to 100 mm, they would lay out group or team 1's course and then connect team or group 2's course by flipping it over horizontally, so that the 100 mm sides were combined.
The groups then used the size of the scaled-down Speedbot to design how the robot should navigate the course using arrows and precise measurements.
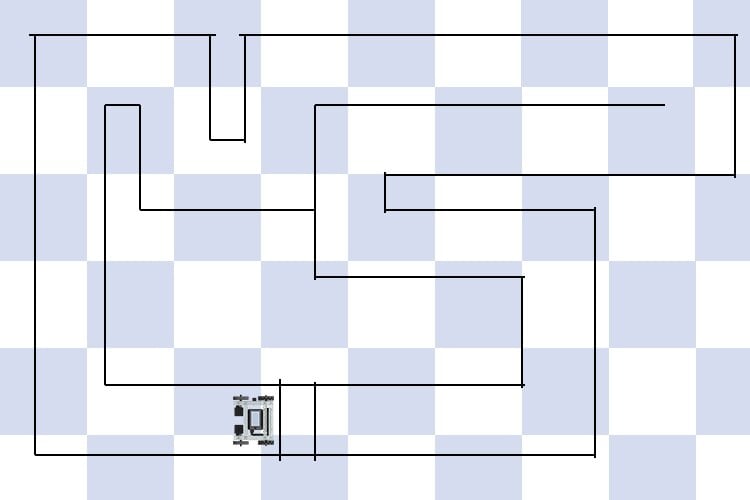
The students then scaled-up their drawing so that it is life-sized and tested it to see which group navigated it the fastest!