
Real-World Automation Processes
The Capstone Project Competition
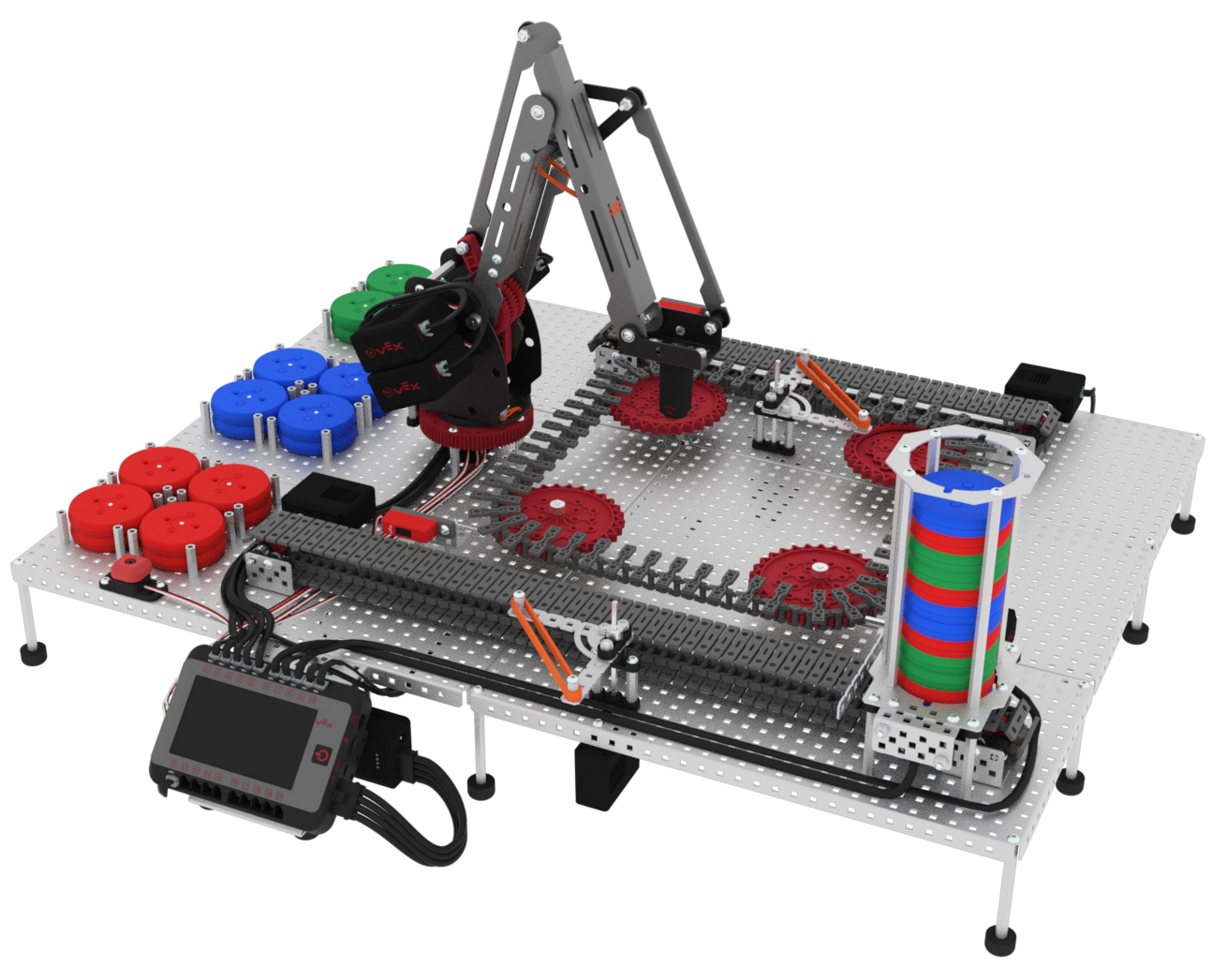
The Capstone Project Competition is designed to mimic a factory setting. The competition involves designing, creating, iterating, and coding your Workcell to move completed products (colored disks) from one side of the factory to the other (across the Workcell base plates) in the most efficient, accurate, and timely manner. In this competition, you will explore the topics of accuracy and efficiency which is something that factories worldwide must examine in depth to be profitable. The Lab 13 Capstone Project Competition will introduce and test how well you are able to balance accuracy and efficiency, putting you in the shoes of a factory designer, coder, and operator.
Factory designs are dependent on the products being created and/or sorted. These different purposes and designs may look like conveyor and diverter systems at an airport sorting luggage from gate to gate, or plane to plane. This could also look like a mailroom, sorting packages depending on their shipping status: overnight, 2-day, or ground.

Automated Dispensing and Diverting of Packages
Automated dispensing of products allows for faster sorting times and less reliability on human interaction. This can reduce the amount of human error while ensuring speed and reliability.
In Workcell Lab 11, a disk feeder is added to the build to support automated dispensing of disks. This can be built upon in the Capstone Project Competition. Here, the disk feeder can be altered in order to hold more disks at the start of a run, allowing for more continuous dispensing which leads to faster sorting. An Optical Sensor can also be attached near the disk feeder. The addition of sensors allows the system to detect the color of disks autonomously and execute certain behaviors in VEXcode V5 according to the color.
After packages (disks) are dispensed and detected, these different packages can be diverted to multiple conveyors that transport items throughout different development stages or to their final sorting destination. This real-world context can be applied when using a disk feeder and Optical Sensor for the Capstone Project Competition.
Constraints
Constraints are part of any factory design. These limitations can be used to keep projects within a certain budget, limit the size and area of the factory, or specify the speed with which a product must move through the factory. Many constraints like these are seen both in industry and simulated in the Capstone Project Competition.
These constraints include:
- The number and organization of the baseplates used.
- The fixed location for Start and End Zones.
- The 10-minute limit for each run
- The requirement that each design is limited to the hardware and electronic components included in a single Workcell Kit.
Time is Money
The more products that can be sorted correctly, the higher the profit for the factory. Efficiency is important when considering profitability. When the speed is increased, more products can be created or sorted.
When the speed is increased, it is important not to sacrifice accuracy. If many mistakes are made, then that additional profit can be lost due to lost product or repairs needed within the factory. This is why disks that touch a baseplate or fall off of the Workcell are penalized in the Capstone Project Competition. Being timely and accurate is rewarded, while mistakes are penalized.
Safety
Industrial robots are an important part of most types of manufacturing today. As robots are becoming more common in the workplace, it is essential to have safety standards to protect workers from injuries and accidents.

These potentially dangerous pieces of equipment have many hazards which need to be safeguarded against. Safety mechanisms are designed to stop or slow down a piece of equipment. Emergency stops, also known as E-stops, are designed to allow a worker to shut down a piece of equipment, such as a robot.
The Bumper Switch is used to simulate an E-stop in Labs 2-13 and the Workcell Extensions. This is to ensure your safety as well as the safety of others around you while your Workcell is actively moving.