
实践
在上一节中,您了解了爪子的元素以及爪子的工作原理。 现在,您将应用您所学到的知识来迭代构建,以完成“改进您的爪子”练习活动。
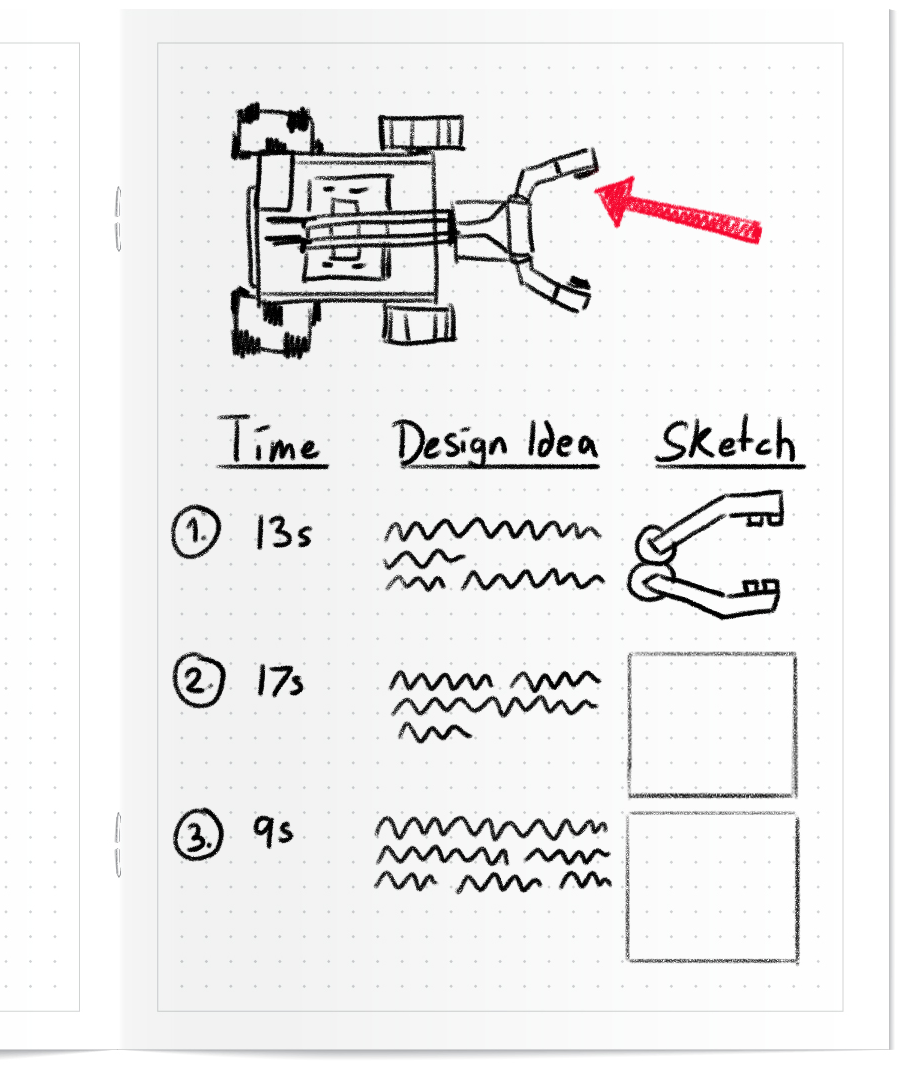
在此活动中,您的爪子机器人必须驶向 IQ 立方体,用爪子收集立方体,并将其驶向场地的另一侧。 您将迭代爪子的设计,以提高机器人在场地周围移动立方体的能力。 观看下面的视频,了解如何运用所学知识来完成“改进你的爪子”练习活动。
现在轮到你完成“改善你的爪子”练习活动了!
准备迎接挑战
在竞争(下一页)中,您将在 Grab and Go 挑战中测试您的爪子设计 。 了解如何参加挑战,检查您的理解程度,然后练习应对挑战。