
Compete
Now that you have iterated on your claw design and practiced picking up and moving cubes with your claw, you are ready to compete in the Grab and Go Challenge! The goal of this challenge is to move three cubes from one side of the Field to the other in the fastest time. Watch the animation below to see one way the Clawbot can move to complete the challenge.
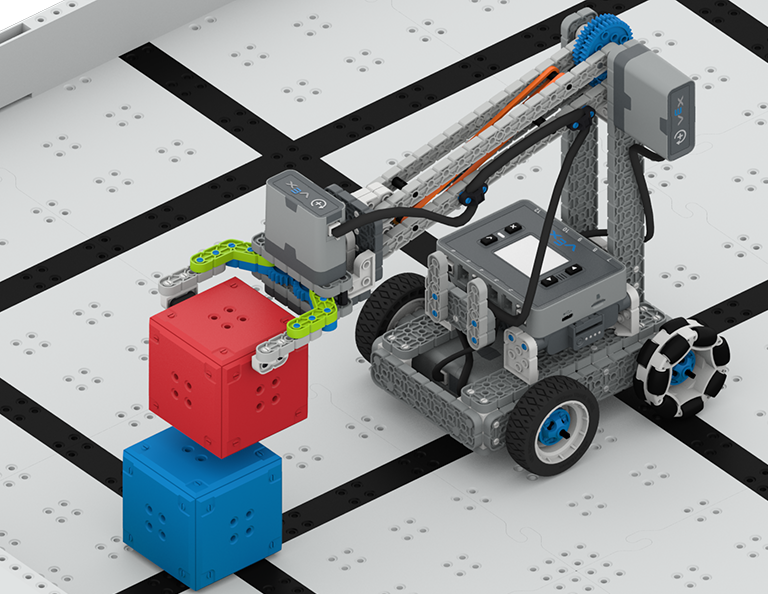
In this animation, the Clawbot begins against the lower wall in the center of the Field. Along the wall to the left of the robot, three cubes are placed, one at each black line. The robot drives forward and turns left to grasp the first cube, then reverses and turns around to place the cube in the area against the right side wall. This process is repeated to move the other two cubes from the left side to the right side of the Field.
Follow the steps in this document to complete the Grab and Go Challenge.
Once you have completed the Grab and Go Challenge, check in with your teacher. Ensure you have documented the results of the challenge in your engineering notebook.
Wrap Up Reflection
Now that you have iterated on your claw design and played the Grab and Go Challenge, it is time to reflect on what you have learned and done in this Lesson. Start a new page in your engineering notebook to begin your reflection.
Rate yourself as a novice, apprentice, or expert on each of the following concepts in your engineering notebook. Provide a brief explanation for why you gave yourself that rating for each concept:
- Designing, building and iterating on your claw design
- Using the claw to move cubes
- Scouting to make informed decisions about your claw design and game strategy
Use this table to help you determine which category you fall under.
| Expert | I feel that I fully understood the concept and could teach this to someone else. |
| Apprentice | I feel that I understood the concept enough to compete in the challenge. |
| Novice | I feel that I did not understand the concept and did not know how to complete the challenge. |
What is Next?
In this lesson, you learned how a claw works and designed and iterated on a claw for your robot. You practiced picking up and moving cubes with your claw, and competed in the Grab and Go Challenge. In the next lesson, you will:
- Learn how a robot arm works
- Investigate different types of robot arm designs
- Practice using robot arms to lift and lower cubes
- Compete in the Stacked Up Challenge
Select < Return to Lessons to go back to the Lesson Overview.
Select Next Lesson > to continue to Lesson 3, and investigate how robot arms work.