
練習する
前のセクションでは、爪の要素と爪の仕組みについて学びました。 ここで、学んだ内容を適用してビルドを繰り返し、「爪の改善」の練習アクティビティを完了します。
このアクティビティでは、クローボットは IQ キューブまで運転し、クローでキューブを収集し、フィールドの反対側まで運転する必要があります。 フィールド内で立方体を移動させるロボットの能力を向上させるために、爪の設計を繰り返します。 以下のビデオを見て、学んだことを応用して「爪の改善」の練習アクティビティを完了する方法を確認してください。
次は、「爪の改善」の練習アクティビティを完了する番です。
このアニメーションでは、コントローラーを使用して ロボット をキューブまで動かし、爪でそれを回収し、フィールドの反対側 にキューブを移動します。 このアニメーションは、「爪の改善」の練習アクティビティを完了するためにロボットが移動できる 1 つの可能な方法を示しています。
この文書を参考として使用して、練習アクティビティを完了してください。
ビデオファイル
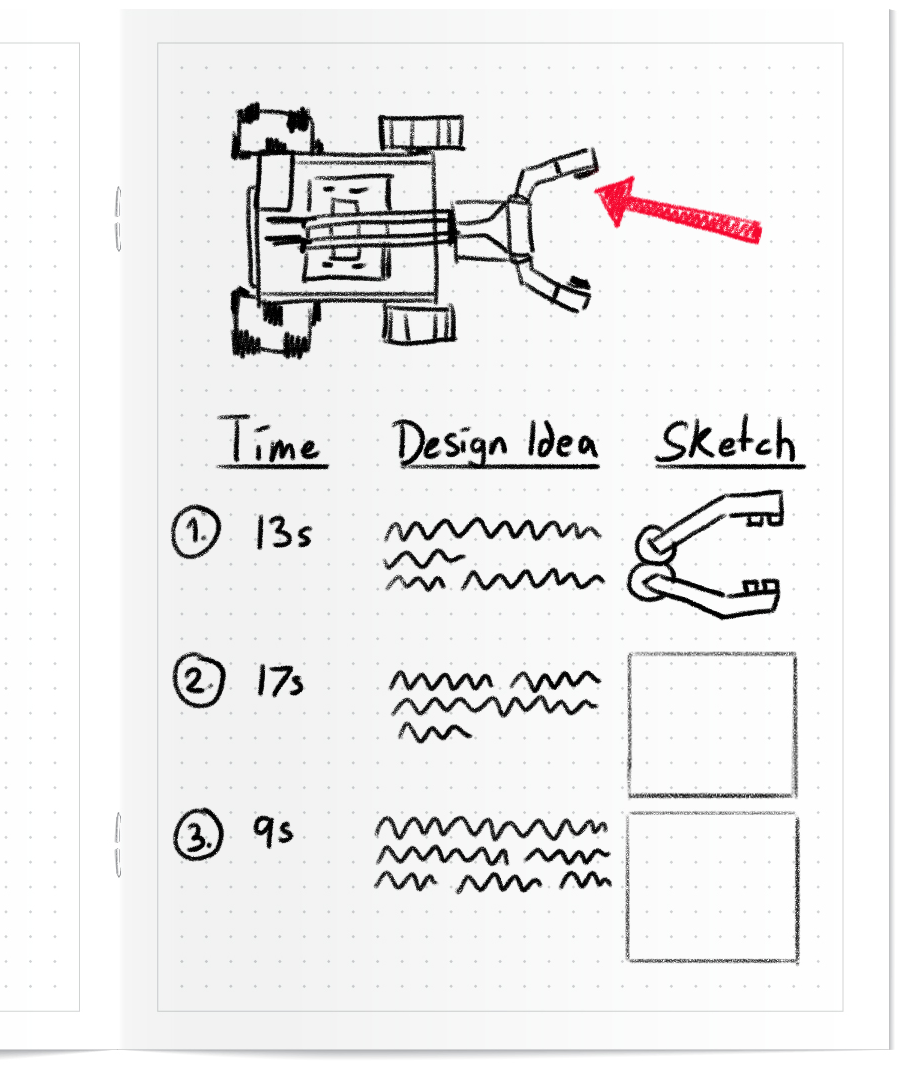
クローの改善」の実践アクティビティを完了したら、設計とテストをエンジニアリング ノートブックに文書化します。
- あなたの デザイン 説明し、図解してください。
- 爪で最初に変えたのは何ですか? なぜ?
- 活動ではどうでしたか?
- 練習アクティビティでのロボットのパフォーマンスを向上させるために、この設計をどのように繰り返しましたか?
設計のアイデアとテストを記録する方法の例については、左側の 画像を参照してください。
チャレンジの準備をする
競争 (次のページ) では、グラブ アンド ゴー チャレンジで爪のデザイン テストします。 チャレンジに参加する方法を学び、理解度を確認してから、チャレンジに向けて練習してください。