
برمجة زرين
![]() مجموعة أدوات المعلم
- الغرض من هذا النشاط
مجموعة أدوات المعلم
- الغرض من هذا النشاط
في الصفحة السابقة، كان الطالب يبرمج الذراع على الدوران باستخدام زر Brain Up. ستعتمد هذه الصفحة على المشروع السابق لبرمجة الذراع أيضًا للدوران لأسفل باستخدام زر Brain Down.
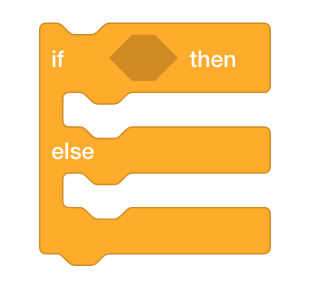
سيعرف هذا النشاط الطلاب على البرمجة باستخدام كتل [If then else] بالإضافة
إلى استخدام كتل الاستشعار والمشغل لجعل الروبوت يتحقق مما إذا كان يتم الضغط على زري Brain
Up أو Down. إذا تم الضغط على زر Brain Up، فسيتم رفع ذراع Clawbot. إذا تم الضغط على زر
Brain Down، فسيتم خفض ذراع Clawbot. يعتمد هذا على النشاط السابق وسيضع أيضًا الأساس لتحدي
واجهة المستخدم في قسم إعادة التفكير.
بالنسبة لتحدي واجهة المستخدم، سيحتاج الطلاب
إلى برمجة Clawbot لرفع الذراع، وخفض الذراع، وفتح المخلب، وإغلاق المخلب باستخدام الأزرار
الموجودة على دماغ IQ Robot.
لمزيد من المعلومات حول [If then] أو [If then
else]أو زر <الدماغ الذي تمالضغط
عليه أو> كتل [Spin]، قم بزيارة معلومات المساعدة
داخل VEXcode IQ. لمزيد من المعلومات حول أداة المساعدة المدمجة هذه، انقر هنا. فيما
يلي ملخص لما سيفعله طلابك في هذا النشاط:
- استخدم ArmUp2 الحالي لبناء مشروع ArmUpDown المقدم والتنبؤ بما سيفعله المشروع.
- اعرض مخططًا انسيابيًا للمساعدة في شرح تدفق الكتل في المشروع.
- صقل تفسيراتهم لما يفعله مشروع ArmUpDown.
- شاهد الفيديو التعليمي If Then Else Blocks.
- قم بتحرير مشروعهم باستخدام كتل [If then else].
- التوقف والمناقشة: سيفكر الطلاب في توقعاتهم حول ما سيقوم به Clawbot في المشروع مقارنة بملاحظاتهم الفعلية.
- برمجة المخلب باستخدام نفس مخطط المشروع من برمجة الذراع.
| الكمية | المواد اللازمة |
|---|---|
| 1 |
فيكس آي كيو سوبر كيت |
| 1 |
VEXcode IQ |
| 1 |
دفتر ملاحظات هندسي |
| 1 |
قالب Clawbot (مجموعة نقل الحركة) |
ذراع Clawbot جاهزة للتحرك لأعلى ولأسفل! سيمنحك
هذا النشاط الأدوات اللازمة لبرمجة
الروبوت الخاص بك بسلوكيات مشروطة. كتلة
[إذا كان الأمر كذلك] هي التركيز الرئيسي داخل
النشاط ولكن يتم أيضًا استخدام كتل الاستشعار والتحكم والمشغل الأخرى.

يمكنك استخدام معلومات التعليمات داخل VEXcode IQ للتعرف على الكتل. للحصول على إرشادات حول استخدام ميزة " المساعدة"، راجع البرنامج التعليمي "استخدام المساعدة".

الخطوة 1: برمجة تحريك الذراع لأسفل.
في الصفحة السابقة، قمت ببرمجة ذراع Clawbot على الدوران لأعلى عند الضغط على زر Brain Up. ولكن، ماذا عن خفض الذراع أيضًا ؟ دعونا أولاً نعيد النظر في مشروع ArmUp2 السابق.
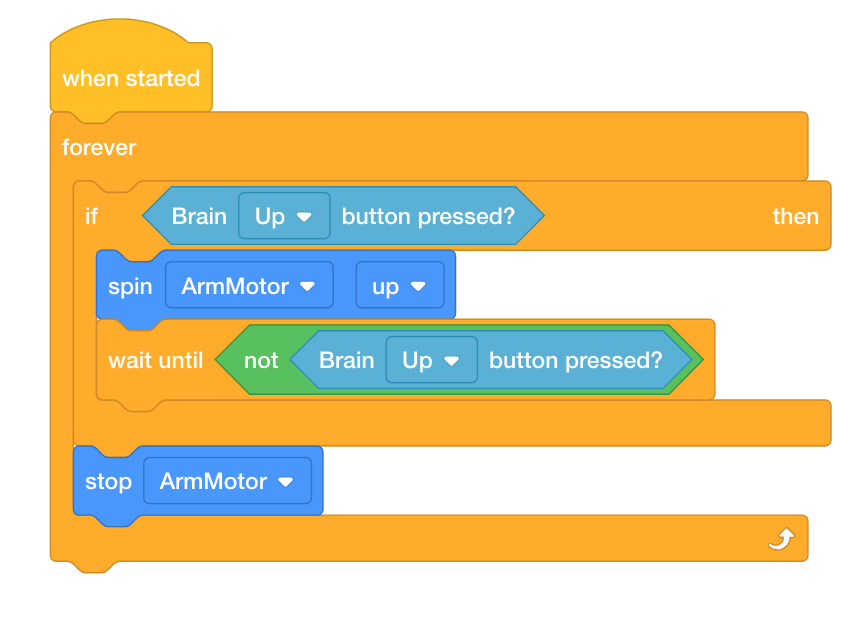
هل من الممكن استخدام نفس الكتلة [إذا كان الأمر كذلك] لتدوير الذراع لأعلى لتدوير الذراع لأسفل أيضًا ؟ لنجرب ذلك! قم ببناء المشروع أدناه عن طريق تحرير مشروع ArmUp2 الموجود بالفعل.
-
احفظ المشروع باسم ArmUpDown. إذا كان الطلاب بحاجة إلى مساعدة في حفظ المشروع، فارجع إلى البرنامج التعليمي للتسمية والحفظ.
- تحقق للتأكد من أن اسم المشروع ArmUpDown موجود الآن في النافذة الموجودة في وسط شريط الأدوات.
- تنبأ بما سيقوم به Clawbot في دفترك الهندسي. اشرح سلوك كل من المستخدم والمخلبوت.
- اختبر لمعرفة ما إذا كان تنبؤك بما يفعله Clawbot في المشروع صحيحًا.
- قم بتنزيل المشروع إلى الشريحة 3 على Clawbot، ثم قم بتشغيله.
- للمساعدة في تنزيل مشروع وتشغيله، راجع البرنامج التعليمي في VEXcode IQ الذي يشرح
كيفية تنزيل مشروع وتشغيله.

- تحقق من تفسيراتك للمشروع وأضف ملاحظات لتصحيحها حسب الحاجة.
![]() نصائح للمعلم
نصائح للمعلم
إذا كانت هذه هي المرة الأولى التي يستخدم فيها الطالب VEXcode IQ، فيمكنه أيضًا مشاهدة البرامج التعليمية في شريط الأدوات لتعلم المهارات الأساسية الأخرى.

![]() صندوق أدوات المعلم
صندوق أدوات المعلم
المشروع الذي يبنيه الطلاب أعلاه سينجح. عند الضغط على زر Brain Up، ستدور الذراع لأعلى وعند الضغط على زر Brain Down، ستدور الذراع لأسفل. على الرغم من أن المشروع يعمل كما هو، إلا أنه ليس مكتوبًا على النحو الأمثل. يمكن أن يكون هناك مثال يمكن أن يكون فيه كلا الشرطين صحيحين في نفس الوقت. لاحظ أيضًا أنه نظرًا لأن حالة زر Brain Up تبدأ بالضغط أولاً، إذا تم الضغط باستمرار على زر Brain Up ثم تم الضغط أيضًا على Brain Down، فسيستمر الذراع في الدوران لأعلى. لن يتوقف هذا الإجراء حتى يتم تحرير زر Brain Up. وبالتالي، ستتم إعادة كتابة المشروع في الخطوة التالية لتضمين كتلة [إذا كان الأمر كذلك] لتجنب هذه المشاكل المحتملة.
![]() صندوق أدوات المعلم
-
توقف وناقش
صندوق أدوات المعلم
-
توقف وناقش
الآن بعد أن اختبر الطلاب المشروع، اسألهم عن كيفية مقارنة تنبؤاتهم بملاحظاتهم. قم بتيسير المناقشة من خلال طرح الأسئلة التالية:
-
هل كان تنبؤك هو نفسه تنبؤك ؟
-
ما الذي يبدو أنه يحدث في المشروع ؟
-
هل يتم التحقق من ظروف الضغط على الزرين لأعلى ولأسفل مرة واحدة فقط ؟
-
هل تعتقد أنه يمكن إعادة تنظيم المشروع ليعمل بشكل أكثر كفاءة ؟
الخطوة 2: فهم تدفق المشروع.
في الخطوة السابقة، قام المشروع برفع وخفض الذراع. ومع ذلك، نظرًا لأن حالة بدء الضغط على زر Brain Up هي أولاً، إذا تم الضغط على زر Brain Up ثم الضغط على Brain Down أيضًا، فسيستمر الذراع في الدوران لأن هذا الإجراء لن يتوقف حتى يتم تحرير زر Brain Up. اعرض المخطط الانسيابي التالي الذي يشرح سير المشروع.
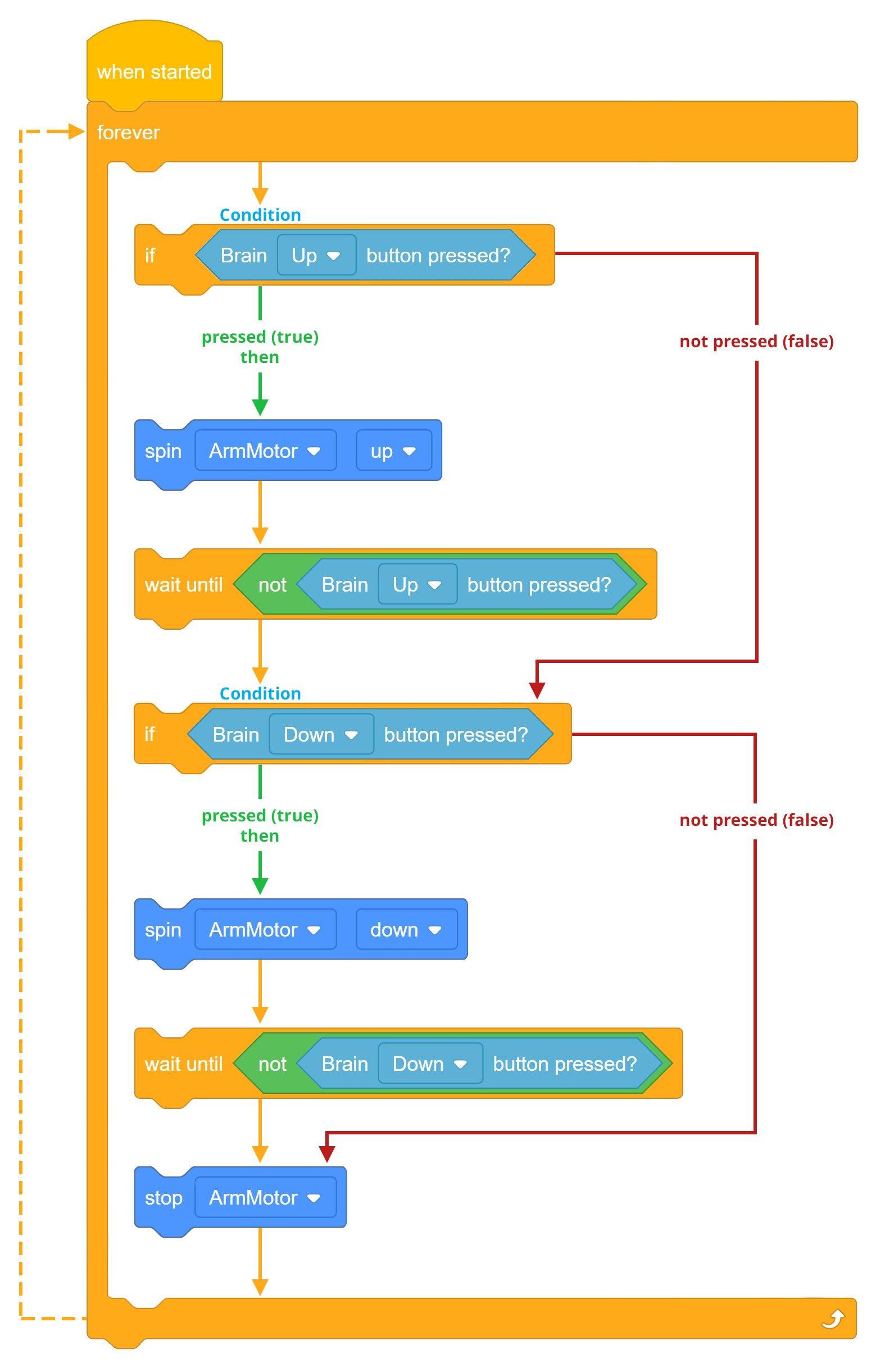
وبالتالي، يمكن للمشروع استبدال كتل [If then] بكتل [If then else] بحيث يمكن أن تكون حالة واحدة فقط صحيحة في أي وقت.
شاهد الفيديو التعليمي التالي على كتل [If then else]:
ابدأ بمشاهدة الفيديو التعليمي If - Then - Else في VEXcode IQ.
سيؤدي استخدام كتل [إذا كان الأمر كذلك] أيضًا إلى التخلص من الحاجة إلى كتل [انتظر حتى] لأن
الذراع سيستمر في الدوران حتى يتم تحرير زر Brain Up. يحدث هذا لأن الجزء "آخر" من [إذا كان
الأمر كذلك] لا يتم الوصول إليه أبدًا حتى تكون حالة زر Brain Up خاطئة
(تم
تحريرها). تسمح كتلة [Forever] بفحص الشرط الأول باستمرار.
دعونا نستكشف تغيير المشروع عن طريق إضافة كتل [If then else]. سيستمر محرك الذراع الآن في
الدوران حتى يتوقف الضغط على زر Brain Up (تحرير). نظرًا لكتلة [Forever]، سيستمر التحقق
من هذه الحالة حتى تكون خاطئة.
بمجرد أن تكون حالة زر Brain Up خاطئة، سيستمر المشروع
إلى المربع التالي، وهو التحقق من الحالة إذا تم الضغط على زر Brain Down. إذا كانت حالة زر
Brain Down الذي يتم الضغط عليه صحيحة، فسوف يدور الذراع لأعلى. مرة أخرى، نظرًا لكتلة
[Forever]، سيستمر التحقق من هذا الشرط حتى يكون خاطئًا.
بمجرد أن تكون حالة زر Brain Up
خاطئة، سيستمر المشروع إلى الكتلة التالية، وهي كتلة [Stop motor ]. وبالتالي، لن يتوقف
محرك الذراع إلا عندما يكون كلا الشرطين كاذبين (لا يتم الضغط على أي زر).

![]() تحفيز المناقشة
تحفيز المناقشة
س: ما هو تقدم تدفق المشروع إذا كانت حالة زر Brain Up الذي يتم الضغط
عليه خاطئة (تم تحريره )؟
ج: إذا كانت الحالة خاطئة، فسيستمر تدفق المشروع في التحقق من حالة
زر Brain Down الذي يتم الضغط عليه.
س: ما هو الغرض من الكتل [إذا كان الأمر كذلك] في المشروع أعلاه
؟
ج: يتيح استخدام كتل [If else] أن تكون حالة واحدة فقط صحيحة في كل
مرة. وبالتالي، لا يمكن أن يكون زر Brain Up وزر Brain Down صحيحين في نفس الوقت
باستخدام كتل [إذا كان الأمر كذلك]، لأن الشرط الثاني من زر Brain Down الذي يتم الضغط
عليه لن يكون خيارًا حتى ما لم يكن الشرط الأول من زر Brain Up الذي يتم الضغط عليه خاطئًا.
والغرض الآخر هو تحسين كفاءة البرمجة.
س: ما هو تقدم تدفق المشروع إذا كانت كل من شروط الزرين لأعلى ولأسفل
التي يتم الضغط عليها خاطئة ؟
ج: إذا كان كلا الشرطين خاطئين، فسيستمر تدفق المشروع إلى كتلة
[إيقاف المحرك] قبل العودة إلى الجزء العلوي من المكدس مكررًا إلى الأبد.
الخطوة 3: البرمجة باستخدام كتل [If then else].
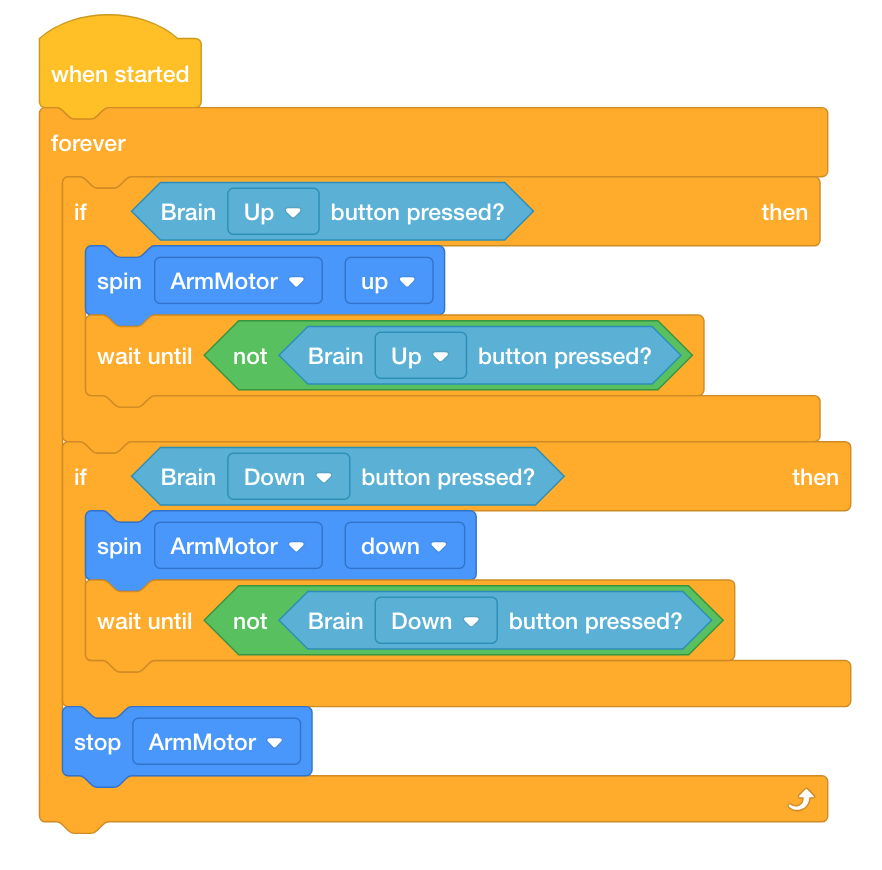
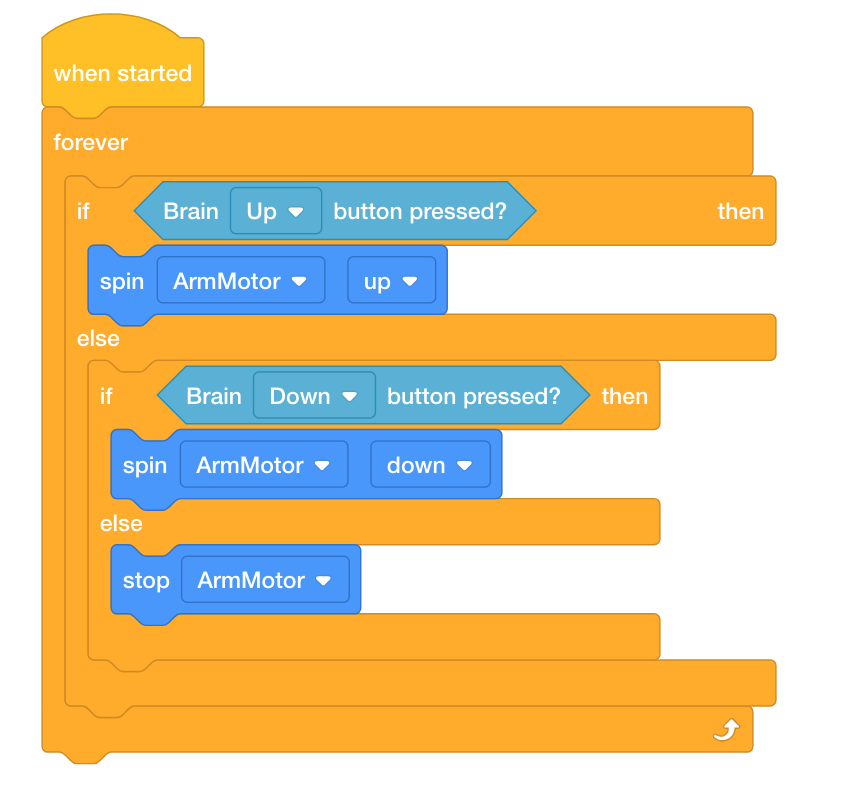
لنستخدم كتل [If then else]:
-
أضف كتل [If then else] إلى مشروع ArmUpDown الخاص بك بحيث يبدو مشروعك كما يلي:
-
احفظ المشروع باسم ArmUpDown2. إذا كان الطلاب بحاجة إلى مساعدة في حفظ المشروع، فارجع إلى البرنامج التعليمي للتسمية والحفظ.
- قم بتنزيل المشروع إلى الشريحة 4 على Clawbot، ثم قم بتشغيله.
- للمساعدة في تنزيل مشروع وتشغيله، راجع البرنامج التعليمي في VEXcode IQ الذي يشرح
كيفية تنزيل مشروع وتشغيله.
- اختبر لمعرفة ما إذا كان الذراع سيدور الآن لأعلى عند الضغط على زر Brain Up ويدور لأسفل عند الضغط على زر Brain Down.
- تحقق من توقف محرك الذراع عند عدم الضغط على زري الدماغ لأعلى ولأسفل (تحريرهما).
- اكتب ملاحظاتك حول كيفية تصرف Clawbot قبل وبعد إضافة كتل if else إلى مشروعك في دفتر ملاحظاتك الهندسية.
![]() صندوق أدوات المعلم
-
توقف وناقش
صندوق أدوات المعلم
-
توقف وناقش
بعد أن يختبر الطلاب المشروع قبل وبعد إضافة كتلة [إذا كان الأمر كذلك]، ناقش مع الطلاب كيف يسمح ذلك للذراع بمواصلة الدوران حتى يتم تحرير زر Brain Up. اطلب من الطلاب مشاركة ملاحظاتهم من دفاتر ملاحظاتهم الهندسية. قم بتيسير المناقشة من خلال طرح الأسئلة التالية:
-
هل ترى أن Clawbot يتصرف بشكل مختلف بين استخدام كتل [If then else] مقارنة بكتل [If then] فقط ؟
-
لماذا تعتقد أن كفاءة البرنامج مهمة ؟
-
هل يتم التحقق من حالة زر Brain Up مرة واحدة فقط في المشروع ؟
يمكن الحفاظ على دفاتر ملاحظات الطلاب الهندسية وتسجيلها بشكل فردي (Google / .docx / .pdf) أو كفريق واحد (Google / .docx / .pdf). توفر الروابط السابقة نموذج تقييم مختلف لكل نهج. عندما يتم تضمين نموذج تقييم في التخطيط التعليمي، من الجيد شرح نموذج التقييم أو على الأقل إعطاء نسخ للطلاب قبل بدء النشاط.
![]() صندوق أدوات المعلم
صندوق أدوات المعلم
قد لا يرى الطلاب الكثير من الاختلاف في كيفية تصرف Clawbot الخاص بهم بين استخدام كتل [If then else] مقارنة بكتل [If then ]. إذا لم يتمكن الطلاب من رؤية الكثير من الاختلاف فعليًا، فقم بتيسير مناقشة حول كفاءة البرمجة وكيف يمكن أن يؤدي تبسيط المشروع إلى استخدام عدد أقل من الكتل. يمكن أن يؤدي استخدام عدد أقل من الكتل في المشروع إلى تقليل كمية الأخطاء المحتملة.
الخطوة 4: برمجة المخلب.
في الخطوة السابقة، تم تحسين المشروع ليعمل بشكل أكثر كفاءة باستخدام كتل [If then else].
في المثال السابق، تم التلاعب بالذراع باستخدام زري الدماغ لأعلى ولأسفل.
باستخدام نفس
مخطط المشروع بالضبط، يمكن أيضًا التلاعب بالمخلب.
-
راجع مشروع ArmUpDown2 وقم بتغيير كتل [Spin] إلى ClawMotor بدلاً من ArmMotor باستخدام القائمة المنسدلة.
تأكد من أن زر Brain Up يدور المخلب "مفتوح" وأن زر Brain Down يدور المخلب "مغلق" باستخدام القوائم المنسدلة.
-
احفظ المشروع باسم ClawUpDown. إذا كان الطلاب بحاجة إلى مساعدة في حفظ المشروع، فارجع إلى البرنامج التعليمي للتسمية والحفظ.

- قم بتنزيل المشروع إلى الشريحة 1 على Clawbot، ثم قم بتشغيله.
- للمساعدة في تنزيل مشروع وتشغيله، راجع البرنامج التعليمي في VEXcode IQ الذي يشرح
كيفية تنزيل مشروع وتشغيله.
- اختبر لمعرفة ما إذا كان المخلب سيدور الآن مفتوحًا عند الضغط على زر Brain Up والدوران مغلقًا عند الضغط على زر Brain Down.
- تحقق من أنه عندما لا يتم الضغط على زري الدماغ لأعلى ولأسفل (تحريرهما) يتوقف محرك المخلب.
- اكتب ملاحظاتك حول كيفية تصرف Clawbot قبل وبعد إضافة كتل if else إلى مشروعك في دفتر ملاحظاتك الهندسية.
![]() صندوق أدوات المعلم
صندوق أدوات المعلم
الآن بعد أن أصبح لدى الطلاب المهارات اللازمة للتعامل مع الذراع والمخلب باستخدام الأزرار،
اطلب من الطلاب تبادل الأفكار حول كيفية تنفيذ جميع الإجراءات الأربعة في نفس المشروع
(الذراع لأعلى، والذراع لأسفل، والمخلب مفتوح، والمخلب مغلق). سيستخدم
الطلاب كتلة أخرى [إذا كان الأمر كذلك] في قسم إعادة التفكير للسماح للروبوت بتنفيذ
جميع الإجراءات الأربعة.
![]() قم بتمديد تعلمك
-
اضبط كتلة إيقاف المحرك
قم بتمديد تعلمك
-
اضبط كتلة إيقاف المحرك
إذا قام الطلاب ببرمجة الروبوت الخاص بهم لرفع وخفض الذراع، فقد يتسبب وزن المخلب في انجراف
الذراع لأسفل.
في هذه الحالة، يمكن استخدام كتلة [ضبط إيقاف المحرك] بحيث لا يسقط
الذراع بسبب الجاذبية ووزن المخلب. يمكن استخدام هذه الكتلة في بداية المشروع وسيتم تطبيقها
على جميع كتل المحركات المستقبلية لبقية المشروع.

تحتوي كتلة إيقاف المحرك المضبوطة على ثلاثة إعدادات:
- تتسبب الفرامل في توقف المحرك على الفور.
- يسمح الساحل للمحرك بالدوران تدريجيًا إلى نقطة توقف.
- يؤدي التوقف إلى توقف المحرك على الفور وإعادته إلى وضع التوقف إذا تم نقله.