
Správce jako uživatelské rozhraní
Vzdálené ovládání robota
K interakci s našimi televizory nejčastěji používáme dálkové ovladače. Stiskneme tlačítka, která způsobí, že se na televizoru zobrazí požadovaný kanál nebo informační/přístupová obrazovka. Technicky je dálkové ovládání vašeho televizoru uživatelské rozhraní. Je to však mnohem méně sofistikované uživatelské rozhraní než to, které používá váš smartphone.
Programování IQ Controller je mnohem sofistikovanější. Během zápasů soutěže řízených řidičem chcete, aby váš jezdec/tým měl co nejvíce výhod. Tlačítka a joysticky můžete naprogramovat tak, aby prováděly více než jedno jednoduché chování, a můžete je naprogramovat tak, aby prováděly složité chování, když se tlačítka/joysticky používají v kombinaci - podobně jako některé herní ovladače. Jako programátor vašeho ovladače zvažujete, která tlačítka použít v kombinaci tím, že zjistíte, jak by měly být vaše prsty a ruce umístěny, abyste dosáhli na všechna dotyčná tlačítka.
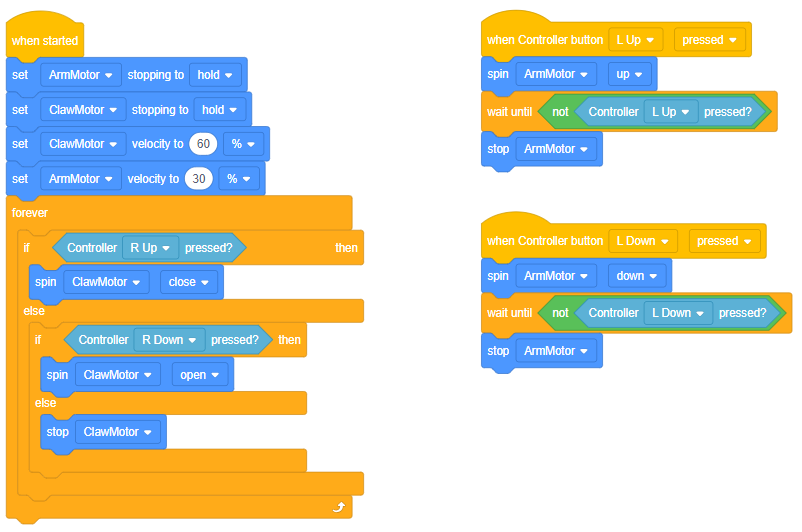
Výše uvedený obrázek ukazuje projekt z ukázkového projektu Controller Buttons z VEXcode IQ. Vidíte, jak má smyčka [Forever] uvnitř vnořené dva [If then else] bloky? Umožňuje, aby projekt zkontroloval, zda jsou stisknuta tlačítka R Up nebo R Down a zda robot otáčí motor drápku zavřený nebo otevřený na základě jednoho stisknutí. Tato [Navždy] smyčka je velmi důležitá. Opakovaně kontroluje, která tlačítka jsou stisknuta, aby robot provedl příslušné chování.
Zvažte, že byste mohli umístit dva <Controller Pressed> snímací bloky do bloku <and> operátora. To by mělo za následek kontrolu projektu, pokud by byla stisknuta dvě tlačítka. Můžete také umístit <and> blok do jiného <and> bloku a před provedením chování zkontrolovat tři podmínky. To by vám umožnilo naprogramovat sekvence chování, které lze spustit jednoduchým stisknutím tlačítek na ovladači.
Zvažte, kolik dalších kombinací podmíněností byste mohli vytvořit se všemi tlačítky a jejich kombinacemi na ovladači. Samozřejmě, když naprogramujete složitější chování do fungování regulátoru, projekt se přiblíží k tomu, aby byl robot autonomní. Soutěžní tým musí zjistit, které chování je nejlepší naprogramovat do svých ovladačů jako složité sekvence a které chování je nejlepší nechat rozložené na více částí, aby ovladač (uživatel) měl větší kontrolu nad rychlostí a přesností chování.
![]() Tipy pro učitele
-
Modelování
Tipy pro učitele
-
Modelování
Modelujte, jak kombinovat <and> bloky pro studenty, pokud mají potíže s představou kombinace <and> bloků tak, aby zahrnovaly více než jednu podmínku. Zde je příklad:

Tento příklad ukazuje pouze první příkazový blok a polovinu dalšího, ale po stisknutí těchto tří tlačítek (E Down, F Up a F Down) může robot provést celou řadu chování.
![]() Motivovat diskusi
Motivovat diskusi
VEX každý rok vyzývá své uživatele novou hrou. Týmy soutěží v zápasech, které se skládají z jedné minuty (60 sekund) autonomního období (bez ovladače), následované jednou minutou (60 sekund) kontrolovaného období řidiče (kontrolor). Někteří studenti mohli dříve soutěžit v robotických soutěžích buď jako součást klubu nebo týmu. Níže uvedené otázky žádají studenty, aby se podělili o své zkušenosti a/nebo zájmy v soutěžích.
Q: Soutěžil zde někdo, nebo někdo, koho znáte, v robotické soutěži?
Odpověď: Povzbuďte studenty, kteří soutěžili, aby se podělili o své zkušenosti. Následujte další otázky, jako například „jakého robota jste použili?“ nebo „jaká byla vaše oblíbená část zážitku?“.
Otázka: Má někdo zájem dozvědět se více o letošní soutěži/hře VEX?
Odpověď: Když studenti odpoví ano, můžete je nasměrovat na web soutěže VEX a ukázat video z letošní výzvy.