
Bộ điều khiển như một giao diện người dùng
Điều khiển robot từ xa
Chúng ta thường sử dụng điều khiển từ xa để tương tác với TV. Chúng tôi nhấn các nút giúp TV hiển thị kênh hoặc màn hình thông tin/truy cập mà chúng tôi muốn. Về mặt kỹ thuật, điều khiển từ xa của TV là giao diện người dùng. Tuy nhiên, nó là một giao diện người dùng ít phức tạp hơn nhiều so với giao diện mà điện thoại thông minh của bạn sử dụng.
Lập trình Bộ điều khiển IQ của bạn phức tạp hơn nhiều. Trong các trận đấu do tài xế điều khiển của một cuộc thi, bạn muốn tài xế/đội của mình có nhiều lợi thế nhất có thể. Bạn có thể lập trình các nút và cần điều khiển để thực hiện nhiều hơn một hành vi đơn giản và bạn có thể lập trình chúng để thực hiện các hành vi phức tạp khi các nút/cần điều khiển được sử dụng kết hợp - tương tự như cách một số bộ điều khiển chơi game hoạt động. Là lập trình viên của Bộ điều khiển, bạn cân nhắc sử dụng kết hợp các nút nào bằng cách tìm ra cách đặt ngón tay và bàn tay của bạn để tiếp cận tất cả các nút liên quan.
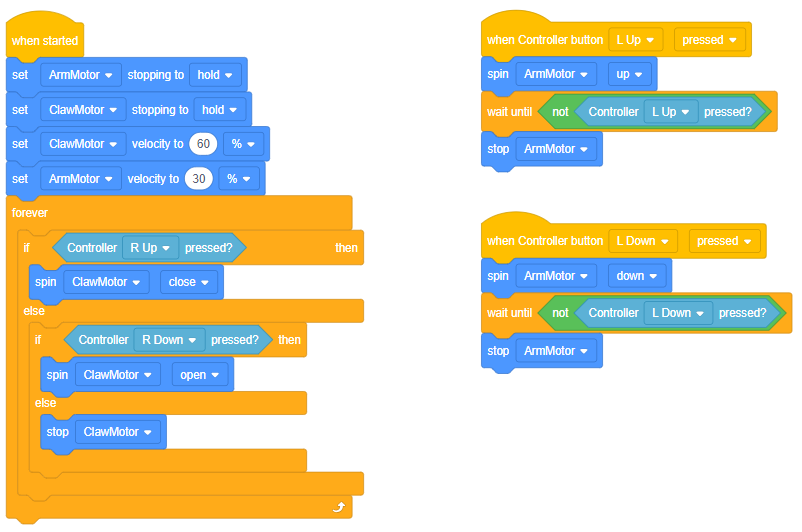
Hình ảnh trên cho thấy dự án từ dự án mẫu Nút điều khiển từ VEXcode IQ. Bạn có thấy vòng lặp [Mãi mãi] có hai khối [Nếu sau đó] được lồng vào bên trong nó không? Nó làm cho dự án kiểm tra xem các nút R Up hay R Down được nhấn và robot quay Claw Motor đóng hoặc mở dựa trên một nút được nhấn. Vòng lặp [Mãi mãi] đó rất quan trọng. Nó giúp Bộ điều khiển IQ của bạn kiểm tra nhiều lần (các) nút nào đang được nhấn để robot thực hiện (các) hành vi thích hợp.
Hãy xem xét rằng bạn có thể đặt hai khối <Controller Pressed> cảm biến trong một khối <and> toán tử. Điều đó sẽ kiểm tra dự án nếu hai nút đang được nhấn. Bạn cũng có thể đặt một <and> khối bên trong một <and> khối khác và có ba điều kiện được kiểm tra trước khi một hành vi được thực hiện. Điều này sẽ cho phép bạn lập trình các chuỗi hành vi có thể được bắt đầu chỉ bằng cách nhấn các nút trên bộ điều khiển của bạn.
Xem xét có bao nhiêu kết hợp khác của các điều kiện bạn có thể tạo với tất cả các nút và kết hợp của chúng trên Bộ điều khiển. Tất nhiên, khi bạn lập trình các hành vi phức tạp hơn vào chức năng của Bộ điều khiển, dự án sẽ tiến gần hơn đến việc robot tự chủ. Một nhóm cạnh tranh cần tìm ra những hành vi tốt nhất để lập trình vào Bộ điều khiển của họ dưới dạng các chuỗi phức tạp và những hành vi nào tốt nhất nên được phân tách thành nhiều phần để Bộ điều khiển cho phép người lái xe (người dùng) kiểm soát nhiều hơn tốc độ và độ chính xác của hành vi.
![]() Mẹo dành cho giáo viên
-
Làm mẫu
Mẹo dành cho giáo viên
-
Làm mẫu
Mô hình hóa cách kết hợp <and> các khối cho học viên nếu các em gặp khó khăn trong việc tưởng tượng kết hợp <and> các khối để bao gồm nhiều điều kiện. Dưới đây là một ví dụ:

Ví dụ này chỉ hiển thị khối lệnh đầu tiên và một nửa khối lệnh tiếp theo nhưng có thể có toàn bộ chuỗi hành vi để robot thực hiện khi tất cả ba nút này (E Down, F Up và F Down) được nhấn.
![]() Thúc đẩy thảo luận
Thúc đẩy thảo luận
Mỗi năm, VEX thách thức người dùng của mình với một trò chơi mới. Các đội thi đấu trong các trận đấu bao gồm một phút (60 giây) Thời gian tự trị (không có Bộ điều khiển), tiếp theo là một phút (60 giây) Thời gian do người lái xe kiểm soát (Bộ điều khiển). Một số học sinh có thể đã thi đấu trong các cuộc thi robot trước đây với tư cách là một phần của câu lạc bộ hoặc đội. Các câu hỏi dưới đây yêu cầu học viên chia sẻ kinh nghiệm và/hoặc sở thích của các em trong các cuộc thi.
H: Có ai ở đây, hoặc ai đó bạn biết, đã tham gia một cuộc thi robot không?
A: Khuyến khích những học viên đã thi đấu chia sẻ kinh nghiệm của các em. Tiếp tục với nhiều câu hỏi hơn, chẳng hạn như, 'bạn đã sử dụng robot nào?' và/hoặc 'phần yêu thích của bạn trong trải nghiệm là gì?'.
Hỏi: Có ai quan tâm đến việc tìm hiểu thêm về cuộc thi/trò chơi VEX năm nay không?
Đ: Khi sinh viên trả lời có, bạn có thể hướng dẫn họ đến trang web Cuộc thi VEX và chiếu video về thử thách năm nay.