Remixové výzvy: Ovládání Clawbota - Python
![]() Sada nástrojů
první aktivitou
Sada nástrojů
první aktivitou
-
Rozdělte studenty do skupin po 2 nebo 4 studentech. Jeden student by měl být určen jako řidič – student, který bude pomocí ovladače řídit Clawbota.
-
Předměty mohou být jakékoli učební materiály/předměty, které máte po ruce (guma, role lepicí pásky, krabička na kapesníky), a lze je rozdat skupinám studentů na začátku této aktivity. Každá skupina bude potřebovat pouze jeden předmět pro první aktivitu „Chyť předmět!“ a tři předměty pro další dvě aktivity.
-
Pokud to čas dovolí v některé z aktivit Remix, nechte studenty střídat se v roli řidiče.
-
Řidič by měl být schopen provést následující kroky:
-
Pomocí tlačítka R2 otevřete Dráp.
-
Pomocí joysticků pohněte Clawbotem tak, aby se váš objekt nacházel uvnitř otevřeného drápu.
-
Pomocí tlačítka R1 zavřete dráp.
-
Chcete-li objekt uvolnit, znovu otevřete dráp stisknutím tlačítka R2.
-
Chyťte předmět!
Cílem této činnosti je uchopit a uvolnit objekt pomocí Clawbota pomocí Ovladače.
Zde je několik kroků, které povedou vaši skupinu:
- Umístěte předmět vaší skupiny na podlahu a ujistěte se, že váš Clawbot má dostatek prostoru pro pohyb, aniž by zasahoval do ostatních skupin.
- Uveďte kroky, které bude Clawbot potřebovat k uchopení objektu. Nezapomeňte uvést, která tlačítka použijete k provedení tohoto úkolu!
- Do technického poznámkového bloku napište kroky, které uvádí seznam ovladačů.
-
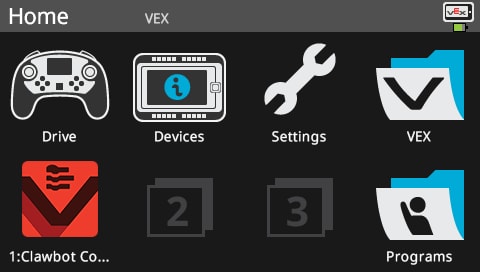
Kliknutím na tlačítko Stáhnout na panelu nástrojů stáhnete projekt Clawbot Control do mozku robota.

-
Zkontrolujte, zda se váš projekt stáhl do Clawbotova mozku, a to tak, že se podíváte na obrazovku Robotova mozku. Název projektu, Clawbot Control, by měl být uveden v slotu 1.
- Spusťte projekt na Clawbotu.
- Uchopte a uvolněte objekt pomocí Clawbota pomocí ovladače.
Gratulujeme! Chytil jsi předmět svým Clawbotem pomocí ovladače!
Byly nějaké rozdíly mezi tvými předpověďmi a akcemi, které jsi během aktivity provedl/a? Pokud ano, přidej si je do technického poznámkového bloku.
![]() Sada nástrojů pro učitele
před druhou
Sada nástrojů pro učitele
před druhou
-
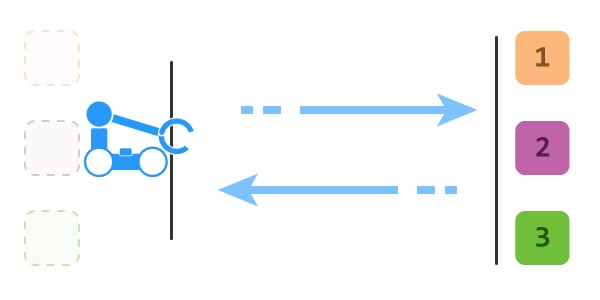
Než začne druhá aktivita (barevné drahokamy), nechte každou skupinu seřadit své Clawboty na jedné straně místnosti. Označte si toto počáteční místo nějakým předmětem nebo páskou na podlaze. Na opačné straně místnosti určete oblast pro vyhledávání předmětů umístěním předmětu na podlahu, která je stejně vzdálená od domovských základen každé skupiny. Může to být předmět ve třídě nebo dokonce i pruh pásky nalepený na podlaze. Dejte skupinám pokyn, aby umístily všechny tři své předměty do oblasti pro vyhledávání za bodem nebo linií, kterou jste stanovili. Tímto způsobem musí každá skupina přesunout svého Clawbota na stejnou vzdálenost, aby splnila požadovaný úkol a zajistila spravedlnost.
-
Pro složitější úkol nechte studenty vrátit předměty na základnu a naskládat je na sebe. Skupina, která jako první dokončí svůj hromádku, vyhrává.
Barevné drahokamy
Cílem této aktivity je využít vašich dovedností Clawbota ke sběru několika objektů, jednoho po druhém, a vrátit je na místo rychleji než ostatní skupiny ve vaší třídě. Hodně štěstí!
Zde je několik kroků, jak vést svůj tým:
- Přesuňte objekty své skupiny za oblast vyhledávání objektů, kterou stanovil váš učitel, a ujistěte se, že váš Clawbot má prostor pro pohyb, aniž by zasahoval do jiných skupin.
- Uveďte kroky, které bude Clawbot potřebovat k uchopení každého předmětu a jeho vrácení na domovskou základnu. Nezapomeňte uvést, která tlačítka použijete k provedení tohoto úkolu!
- Do technického poznámkového bloku napište kroky, které uvádí seznam ovladačů.
- Pomocí hodin ve třídě nebo hodinek si uložte čas a zaznamenejte jej do svého technického poznámkového bloku.
- Načtěte každý objekt co nejrychleji.
Gratulujeme! Všechny tři předměty své skupiny jste shromáždili a vrátili je do domovské základny se svým Clawbotem pomocí ovladače!
![]() Sada nástrojů
třetí aktivitou
Sada nástrojů
třetí aktivitou
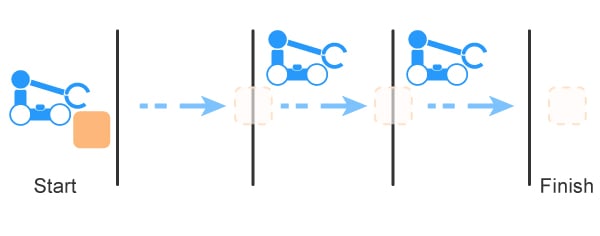
Než začne třetí aktivita (Štafetový běh!), ujistěte se, že studenti jsou stále ve svých malých skupinách po 2 nebo 4 studentech. Cílem je přenést předmět na dráhu dlouhou tři metry. Jedna osoba ve skupině zvedne předmět pomocí Clawbota a pojede s ním vpřed, aby ho odnesla jeden metr. Poté předmět upustí. Další osoba ve skupině předmět zvedne a ponese ho na druhém úseku, kde jej také odhodí. Třetí osoba ve skupině dokončí štafetový běh tak, že ponese předmět pro třetí etapu a hodí ho přes cílovou čáru.
Požádejte jednoho z členů skupiny, aby sledoval čas. Tato osoba by měla také zajistit, aby Clawbot nepřekážel ostatním řidičům ani studentům, a zkontrolovat, zda robot umístí předmět dostatečně daleko za čáru.
Pokud to čas dovolí, zahrajte si výzvu vícekrát, abyste zajistili, že všichni členové skupiny budou mít možnost řídit robota.
Štafetový závod!
Cílem této aktivity je využít dovednosti Clawbota a týmové práce ve štafetovém závodě. Skupina bude zodpovědná za co nejrychlejší přesun předmětu přes třímetrovou dráhu.
Hráč 1:Zvedněte předmět a doneste ho k metrové čáře. Upusť předmět.
Hráč 2:Zvedni předmět a přenes ho z čáry jednoho metru na čáru dvou metru. Upusť předmět.
Hráč 3:Zvedni předmět a dones ho od dvoumetrové čáry k cílové čáře. Upusťte předmět do brankoviště.
Hráč 4:Sledujte čas a ujistěte se, že Clawbot nepřekáží ostatním řidičům ani studentům. Ujistěte se, že robot umístí předmět dostatečně daleko nad linku.