Remix-uitdagingen: Clawbot-besturing - Python
![]() Toolbox voor leerkrachten
-
Vóór de eerste activiteit
Toolbox voor leerkrachten
-
Vóór de eerste activiteit
-
Verdeel de leerlingen in groepjes van 2 of 4. Één leerling moet worden aangewezen als bestuurder: de leerling die de controller gebruikt om de Clawbot te besturen.
-
Voorwerpen kunnen alle schoolmaterialen/voorwerpen zijn die u bij de hand hebt (gum, rol plakband, doos tissues). Deze kunnen aan het begin van de activiteit aan de leerlingengroepen worden uitgedeeld. Elke groep heeft slechts één voorwerp nodig voor de eerste activiteit, "Pak een voorwerp!", en drie voorwerpen voor de andere twee activiteiten.
-
Als de tijd het toelaat, kunnen leerlingen bij een van de Remix-activiteiten om de beurt de rol van chauffeur op zich nemen.
-
De bestuurder moet de volgende stappen kunnen voltooien:
-
Gebruik de R2-knop om de Klauw te openen.
-
Gebruik de joysticks om je Clawbot zo te bewegen dat het object zich in de open Claw bevindt.
-
Sluit de Klauw met de R1-knop.
-
Om het object los te laten, open je de Klauw nogmaals met de R2-knop.
-
Pak een voorwerp!
Het doel van deze activiteit is om een object met de Clawbot te grijpen en los te laten met behulp van de Controller.
Hier zijn enkele stappen om je groep te begeleiden:
- Plaats het object van je groep op de vloer en zorg ervoor dat je Clawbot voldoende ruimte heeft om te bewegen zonder zich met andere groepen te bemoeien.
- Maak een lijst van de stappen die de Clawbot nodig heeft om het object te grijpen. Zorg ervoor dat je opneemt welke knoppen je gaat gebruiken om deze taak uit te voeren!
- Schrijf de stappen die de chauffeurslijsten bevatten in het technische notitieblok.
-
Klik op de knop Downloaden in de werkbalk om het Clawbot Control-project naar het robotbrein te downloaden.

-
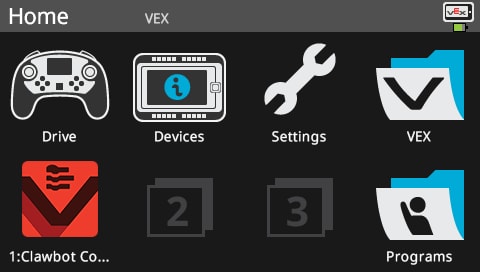
Controleer of uw project is gedownload naar het brein van de Clawbot door naar het scherm van het robotbrein te kijken. De projectnaam, Clawbot Control, moet worden vermeld in sleuf 1.
- Voer project uit op de Clawbot.
- Pak een object vast en laat het los met de Clawbot met behulp van de Controller.
Gefeliciteerd! Je hebt met je Clawbot een voorwerp gepakt met behulp van de controller!
Waren er verschillen tussen je voorspellingen en de acties die je tijdens de activiteit hebt ondernomen? Voeg ze dan toe aan je technische notitieblok.
![]() Toolbox voor leerkrachten
-
vóór de tweede activiteit
Toolbox voor leerkrachten
-
vóór de tweede activiteit
-
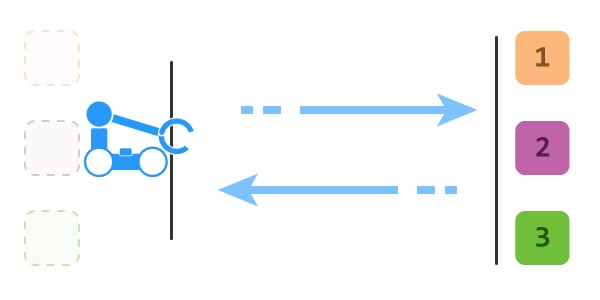
Voordat de tweede activiteit (gekleurde edelstenen) begint, laat elke groep hun Clawbots aan één kant van de kamer opstellen. Markeer deze startlocatie met een voorwerp of een stuk plakband op de vloer. Bepaal aan de andere kant van de kamer een plek waar de voorwerpen kunnen worden opgehaald. Plaats hiervoor een voorwerp op de vloer, op gelijke afstand van de thuisbasis van elke groep. Dit kan een voorwerp in het klaslokaal zijn, maar ook een stuk tape op de vloer. Geef de groepen de opdracht om alle drie hun voorwerpen in het ophaalgebied achter het punt of de lijn te plaatsen die u hebt vastgesteld. Op deze manier moet elke groep hun Clawbot over dezelfde afstand verplaatsen om de vereiste taak uit te voeren en eerlijkheid te garanderen.
-
Voor een complexere uitdaging kunt u de leerlingen de voorwerpen laten terugbrengen naar de thuisbasis en ze laten stapelen. De groep die als eerste zijn stapel compleet heeft, wint.
Gekleurde edelstenen
Het doel van deze activiteit is om je Clawbot-vaardigheden te gebruiken om verschillende objecten één voor één te verzamelen en ze sneller terug te brengen naar een locatie dan de andere groepen in je klas. Succes!
Hier zijn enkele stappen om je team te begeleiden:
- Verplaats de objecten van je groep achter het gebied voor het ophalen van objecten dat je leraar heeft ingesteld en zorg ervoor dat je Clawbot ruimte heeft om te bewegen zonder zich met andere groepen te bemoeien.
- Maak een lijst van de stappen die de Clawbot nodig heeft om elk object te pakken en terug te brengen naar de thuisbasis. Zorg ervoor dat je opneemt welke knoppen je gaat gebruiken om deze taak uit te voeren!
- Schrijf de stappen die de chauffeurslijsten bevatten in het technische notitieblok.
- Gebruik de klaslokaalklok of een horloge, houd de tijd bij en noteer deze in je technische notitieboekje.
- Haal elk object zo snel mogelijk op.
Gefeliciteerd! Je hebt alle drie de objecten van je groep verzameld en teruggebracht naar de thuisbasis met je Clawbot met behulp van de controller!
![]() Toolbox voor leerkrachten
-
vóór de derde activiteit
Toolbox voor leerkrachten
-
vóór de derde activiteit
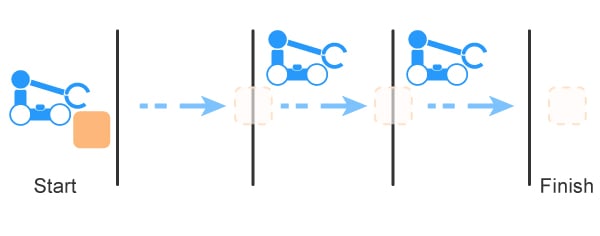
Voordat de derde activiteit (estafette!) begint, zorg ervoor dat de leerlingen nog steeds in kleine groepjes van 2 of 4 leerlingen verdeeld zijn. Het doel is om een object over een afstand van drie meter te verplaatsen. Één persoon in de groep pakt het voorwerp op met de Clawbot en rijdt het een meter vooruit. Vervolgens laten ze het voorwerp vallen. De volgende persoon in de groep pakt het voorwerp op en draagt het voor het tweede deel van de route. Daar laat hij/zij het voorwerp ook weer vallen. De derde persoon in de groep voltooit de estafette door het voorwerp voor het derde deel te dragen en over de finishlijn te laten vallen.
Vraag een van de groepsleden om de tijd in de gaten te houden. Deze persoon moet er ook op letten dat de Clawbot geen andere bestuurders of studenten hindert en controleert of de robot het object ver genoeg over de lijn plaatst.
Als de tijd het toelaat, kun je de uitdaging meerdere keren spelen om ervoor te zorgen dat alle groepsleden de kans krijgen om de robot te besturen.
Relaisrace!
Het doel van deze activiteit is om je Clawbot- en teamworkvaardigheden te gebruiken in een estafetteloop. De groep is verantwoordelijk voor het verplaatsen van een object over een afstand van drie meter in de snelst mogelijke tijd.
Speler 1:Pak het object en draag het naar de meterlijn. Laat het voorwerp vallen.
Speler 2:Pak het voorwerp op en draag het van de één-meter-lijn naar de twee-meter-lijn. Laat het voorwerp vallen.
Speler 3:Pak het voorwerp op en draag het vanaf de twee-meterlijn naar de finishlijn. Laat het object in het doelgebied vallen.
Speler 4:Houd de tijd in de gaten en zorg ervoor dat de Clawbot geen andere bestuurders of studenten hindert. Zorg ervoor dat de robot het object ver genoeg over de lijn plaatst.