Sfide Remix: Controllo Clawbot - Python
![]() Toolbox per l'insegnante
-
Prima della prima attività
Toolbox per l'insegnante
-
Prima della prima attività
-
Dividere gli studenti in gruppi da 2 o 4. Uno studente deve essere designato come conducente, ovvero colui che utilizza il controller per guidare il Clawbot.
-
Gli oggetti possono essere qualsiasi materiale/oggetto scolastico che hai a portata di mano (gomma, rotolo di nastro adesivo, scatola di fazzoletti) e possono essere distribuiti ai gruppi di studenti all'inizio di questa attività. Ogni gruppo avrà bisogno di un solo oggetto per la prima attività, "Prendi un oggetto!" e di tre oggetti per le altre due attività.
-
Se il tempo lo consente, in una qualsiasi delle attività Remix, fate in modo che gli studenti si alternino nel ruolo di conducenti.
-
Il conducente dovrebbe essere in grado di completare i seguenti passaggi:
-
Utilizzando il tasto R2, apri l'Artiglio.
-
Utilizzando i joystick, muovi il tuo Clawbot in modo che l'oggetto sia posizionato all'interno dell'artiglio aperto.
-
Utilizzando il tasto R1, chiudere l'artiglio.
-
Per rilasciare l'oggetto, apri nuovamente l'Artiglio usando il tasto R2.
-
Afferra un oggetto!
L'obiettivo di questa attività è afferrare e rilasciare un oggetto con il Clawbot utilizzando il controller.
Ecco alcuni passaggi per guidare il tuo gruppo:
- Posiziona l'oggetto del tuo gruppo sul pavimento e assicurati che il tuo Clawbot abbia abbastanza spazio per muoversi senza interferire con gli altri gruppi.
- Elenca i passaggi necessari al Clawbot per afferrare l'oggetto. Non dimenticare di specificare quali pulsanti utilizzerai per portare a termine questa attività!
- Annotare i passaggi elencati dal Driver nel quaderno di progettazione.
-
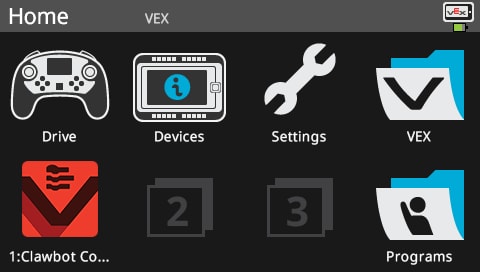
Fare clic sul pulsante Download nella barra degli strumenti per scaricare il progetto Clawbot Control nel Robot Brain.

-
Controlla che il tuo progetto sia stato scaricato nel cervello del Clawbot guardando lo schermo del cervello del robot. Il nome del progetto, Clawbot Control, dovrebbe essere elencato nello slot 1.
- Esegui il progetto sul Clawbot.
- Afferrare e rilasciare un oggetto con il Clawbot utilizzando il controller.
Congratulazioni! Hai afferrato un oggetto con il tuo Clawbot utilizzando il controller!
Ci sono state differenze tra le tue previsioni e le azioni che hai intrapreso durante l'attività? In tal caso, aggiungili al tuo quaderno di progettazione.
![]() Toolbox per l'insegnante
-
Prima della seconda attività
Toolbox per l'insegnante
-
Prima della seconda attività
-
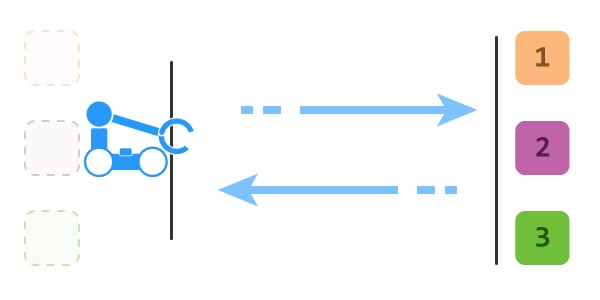
Prima che inizi la seconda attività (gemme colorate), chiedi a ogni gruppo di allineare i propri Clawbot su un lato della stanza. Segna il punto di partenza con un oggetto o con una striscia di nastro adesivo sul pavimento. Sul lato opposto della stanza, determinare un'area di recupero degli oggetti posizionando un oggetto sul pavimento equidistante dalla posizione della base di ogni gruppo. Può trattarsi di un oggetto da usare in classe o anche di una striscia di nastro adesivo sul pavimento. Chiedete ai gruppi di posizionare tutti e tre gli oggetti nell'area di recupero dietro il punto o la linea che avete stabilito. In questo modo, ogni gruppo deve spostare il proprio Clawbot della stessa distanza per portare a termine il compito richiesto e garantire l'equità.
-
Per una sfida più complessa, chiedete agli studenti di riportare gli oggetti alla base e di impilarli. Vince il gruppo che completa per primo la propria pila.
Gemme colorate
L'obiettivo di questa attività è usare le tue abilità con Clawbot per raccogliere diversi oggetti, uno alla volta, e riportarli al loro posto più velocemente degli altri gruppi della tua classe. Buona fortuna!
Ecco alcuni passaggi per guidare il tuo team:
- Sposta gli oggetti del tuo gruppo dietro l'area di recupero oggetti stabilita dall'insegnante e assicurati che il tuo Clawbot abbia spazio per muoversi senza interferire con gli altri gruppi.
- Elenca i passaggi che il Clawbot dovrà seguire per afferrare ogni oggetto e riportarlo alla base. Non dimenticare di specificare quali pulsanti utilizzerai per portare a termine questa attività!
- Annotare i passaggi elencati dal Driver nel quaderno di progettazione.
- Utilizzando l'orologio dell'aula o un orologio da polso, segna il tempo e registralo sul tuo quaderno di ingegneria.
- Recupera ogni oggetto il più velocemente possibile.
Congratulazioni! Hai raccolto tutti e tre gli oggetti del tuo gruppo e li hai riportati alla base con il tuo Clawbot utilizzando il controller!
![]() Toolbox per l'insegnante
-
Prima della terza attività
Toolbox per l'insegnante
-
Prima della terza attività
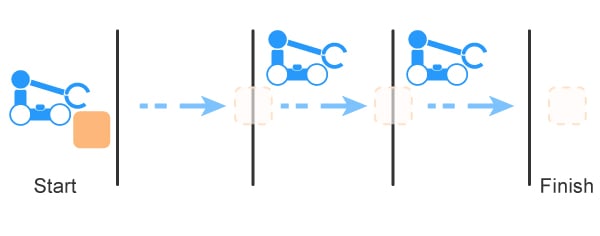
Prima che inizi la terza attività (staffetta!), assicuratevi che gli studenti siano ancora nei loro piccoli gruppi da 2 o 4 studenti. L'obiettivo è trasportare un oggetto su un percorso di tre metri. Una persona del gruppo raccoglierà l'oggetto utilizzando il Clawbot e lo trasporterà per un metro. Quindi lasceranno cadere l'oggetto. La persona successiva del gruppo raccoglierà l'oggetto e lo porterà nella seconda tappa, dove poi lo lascerà cadere. La terza persona del gruppo concluderà la staffetta trasportando l'oggetto per la terza tappa e lasciandolo cadere oltre la linea del traguardo.
Chiedi a uno dei membri del gruppo di controllare il tempo. Questa persona deve anche assicurarsi che il Clawbot non ostacoli gli altri conducenti o studenti e controllare che il robot posizioni l'oggetto a una distanza sufficiente oltre la linea.
Se il tempo lo consente, gioca la sfida più di una volta per garantire che tutti i membri del gruppo abbiano la possibilità di guidare il robot.
Staffetta!
L'obiettivo di questa attività è mettere alla prova il tuo Clawbot e le tue capacità di lavoro di squadra in una staffetta. Il gruppo avrà il compito di spostare un oggetto lungo un percorso di tre metri nel minor tempo possibile.
Giocatore 1: Raccogli l'oggetto e portalo sulla linea del metro. Lascia cadere l'oggetto.
Giocatore 2: Raccogli l'oggetto e trasportalo dalla linea dei uno a quella dei due metri. Lascia cadere l'oggetto.
Giocatore 3: Raccogli l'oggetto e trasportalo dalla linea dei due metri fino al traguardo. Lascia cadere l'oggetto nell'area del traguardo.
Giocatore 4: Controlla il tempo e assicurati che il Clawbot non ostacoli altri conducenti o studenti. Assicurarsi che il robot posizioni l'oggetto a una distanza sufficiente oltre la linea.