
Programovací smyčky - založené na blocích
![]() Tipy pro učitele
této aktivity
Tipy pro učitele
této aktivity
Programování opakujícího se chování lze dosáhnout pomocí smyček repeat nebo forever. Stručně řečeno, opakování bloků umožňuje programátorovi nastavit určitý počet opakování bloků v rámci smyčky. Blok forever opakuje bloky ve své smyčce donekonečna, nebo dokud není projekt zastaven. V této aktivitě se studenti učí o obou.
Pro více informací o programování sopakováníminebodonekonečnasmyčkami navštivtenápověduve VEXcode V5.
Následuje nástin toho, co budete studenti v této aktivitě dělat:
-
Podívejte se na výukové videoPoužívání smyček.
-
Prozkoumejte ukázkový projekt Opakující se akce (bez gyroskopu).
-
Porovnejte a rozlišujte mezi bloky typu „navždy“ a „opakující se“.
-
Dokončete výzvu Squared Loops, která vyžaduje, aby studenti pohybovali Clawbotem ve čtverci a před každým tahem provedli pohyb drápem a paží.
Clawbot V5 je připraven k pohybu!
Pro informace o blocích můžete použít nápovědu uvnitř VEXcode V5. Pokyny k používání funkce Nápověda naleznete v nápovědě k použití nápovědy.
![]() Tipy pro učitele
Tipy pro učitele
Pokud student používá VEXcode V5 poprvé, může si také prohlédnout tutoriály v panelu nástrojů, kde se naučí další základní dovednosti.
| Množství | Potřebný materiál |
|---|---|
| 1 |
VEX V5 Classroom Starter Kit (s aktuálním firmwarem) |
| 1 |
VEXcode V5 (nejnovější verze, Windows, MacOS, Chromebook) |
| 1 |
Technický poznámkový blok |
| 1 |
Používání smyček (tutoriál) |
| 1 |
Opakující se akce (bez gyroskopu) ukázkový projekt |
Krok 1: Začněme programovat se smyčkami.
- Začněte sledováním výukového videaPoužívání smyček.
-
Otevřete ukázkový projektopakujících se akcí (bez gyra).

-
Zobrazit otevřený ukázkový projekt.
Ve svém technickém notebooku proveďte následující kroky.
-
Předvídat, co bude projekt dělat Clawbot. Vysvětlete více než skutečnost, že se projekt opakuje.
Co se to opakuje? Co dělá Clawbot?
- Napište svou predikci, ale nerozdělte krátký projekt na více než dvě části.
![]() Sada nástrojů pro učitele
-
odpovědí
Sada nástrojů pro učitele
-
odpovědí
-
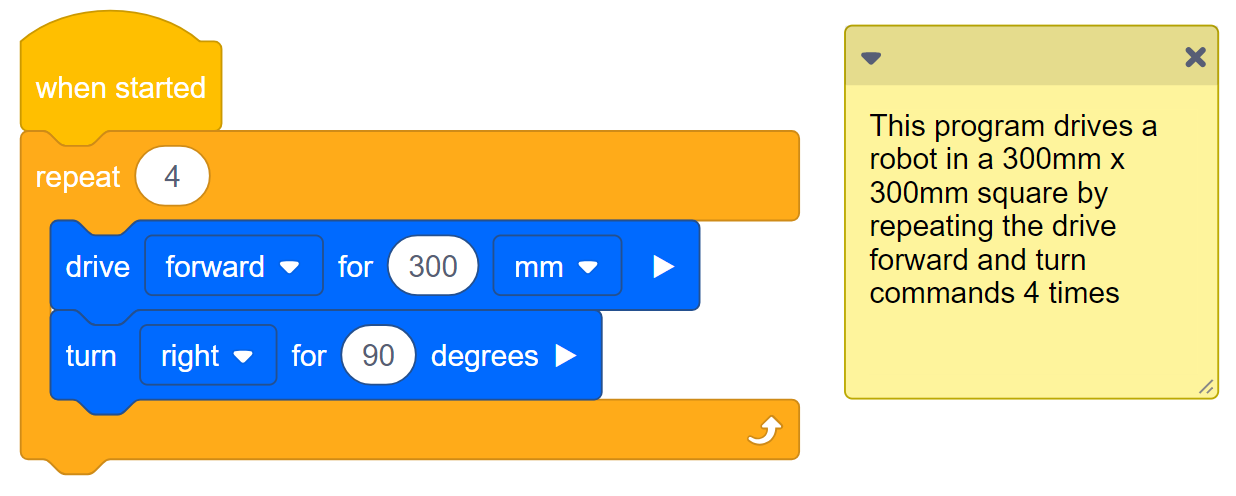
V tomto projektu se robot pojede dopředu o 300 milimetrů a poté se čtyřikrát otočí o 90 stupňů doprava, aby dokončil čtverec. Místo použití stejných 2 bloků 4krát opakující se blok redukuje stejné akce, které by provedlo 8 bloků, na 3 bloky. Opakovací blok opakuje akce jízdy vpřed a následného otáčení.
-
Předpověď by mohla jednoduše znít „Clawbot se pohybuje ve čtverci.“ To by byl stručný způsob, jak zachytit opakované pohyby Clawbota bez jakéhokoli kontextu.
Studentské technické sešity lze vést a hodnotit individuálně (Google Doc / .docx / .pdf) nebo jako tým (Google Doc / .docx / .pdf). Předchozí odkazy poskytují pro každý přístup jinou rubriku. Kdykoli je do vzdělávacího plánování zahrnuta rubrika, je dobrým zvykem ji studentům vysvětlit nebo alespoň rozdat kopie před zahájením aktivity.


Krok 2: Spusťte projekt a pozorujte robota.
Podívejte se znovu na projekt Opakující se akce (bez gyroskopu) (vpravo). Tento projekt bude čtyřikrát opakovat chování vpřed a poté otočit. Blokopakováníse používá, když chcete použít sadu chování určitý počet opakování. Pokud by se blokopakovánínahradil blokemnavždy, robot by opakoval chování vpřed a poté v otočení donekonečna.
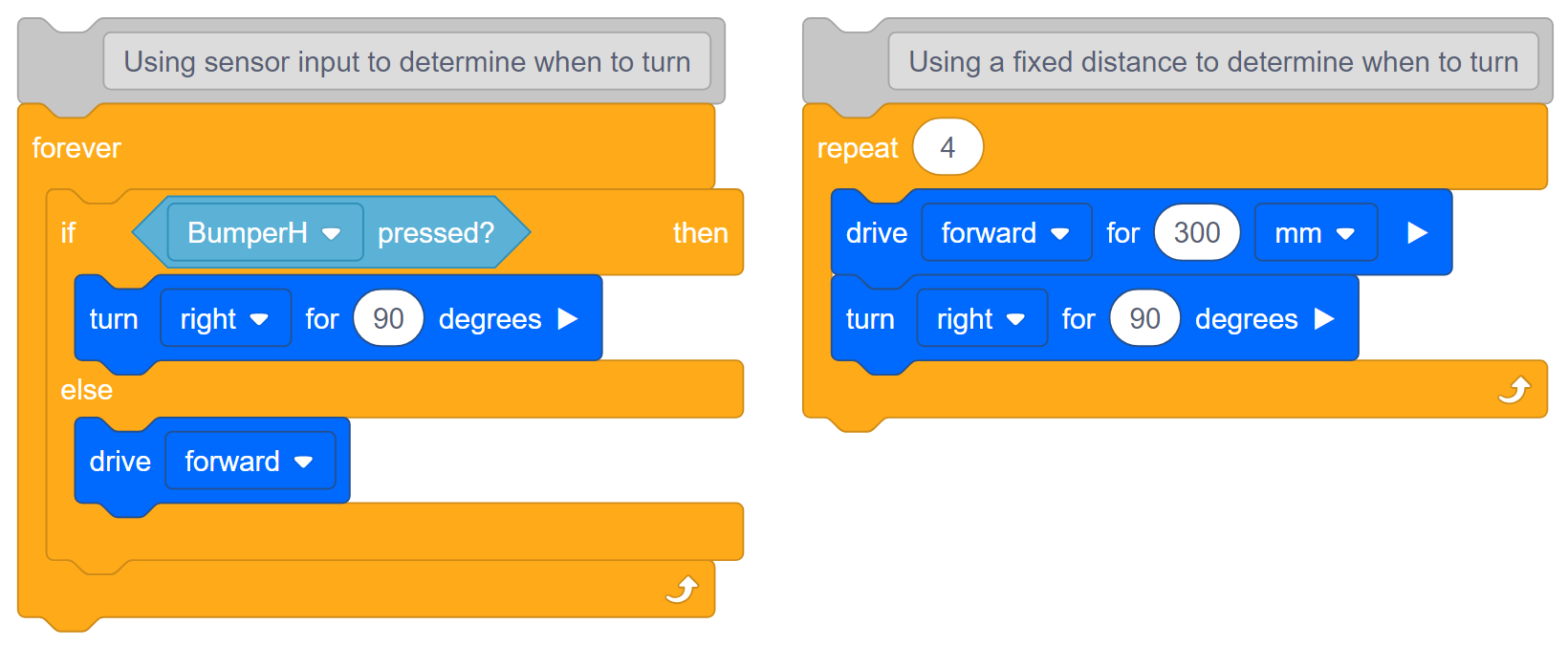
V projektu vlevo se k určení, kdy se má začít otáčet, používá vstup ze senzoru. Projekt vpravo používá pevnou vzdálenost hnacího ústrojí k určení, kdy se má začít otáčet.
Aby bylo možné průběžně kontrolovat vstup senzoru, používá se blokif/elsespolu s blokemforever. V projektu vlevo se robot po stisknutí senzoruBumperHotočí doprava, jinak se robot bude pohybovat vpřed donekonečna, pokud senzorBumperHnebude stisknut. Pro průběžnou kontrolu hodnoty senzoruBumperHse blokif/thennachází uvnitř blokuforever
Výše uvedený projekt vlevo je praktickým příkladem použití struktury, která se opakuje donekonečna - s použitímbloků foreverabloků if/thendohromady. Představte si samořiditelný zametací stroj, který pokračuje v jízdě dopředu, dokud nenarazí do zdi nebo předmětu, pak se otočí a pokračuje v jízdě.
![]() Rozšiřte si své znalosti
Rozšiřte si své znalosti
Pro bližší zkoumání použití cyklů s podmíněnými výrazy si sestavte ukázkový projekt Floor Sweeper ve VEXcode V5.

- Začněte tím, že studentinamontují a zapojí spínače nárazníku.
-
Požádejte studenty, aby otevřeli ukázkový projekt Clawbot (pohon se 2 motory, bez gyroskopu).
- Požádejte studenty, aby sestavili výše uvedený projekt.
-
Nechte studenty uložit projekt jako Zametač podlah.

-
Pokud studenti potřebují pomoc s uložením projektu, podívejte se do tutoriálu Pojmenování a uložení.


Pokud studenti potřebují s některým z bloků pomoc, odkažte je na informace vNápověděnebo na tutoriál.
Požádejte studenty, abystáhli a spustili projekta pozorovali, jak se robot pohybuje. Poté zahajte diskusi ve třídě a požádejte studenty, aby vysvětlili, proč byl použit blok „navždy“ místo bloku „opakování“.
Studenti by si měli všimnout, že blok „navždy“ je použit, protože tento projekt neustále kontroluje, zda je stisknut spínač nárazníku.
Krok 3: Výzva čtvercových smyček!

- Nechte svého Clawbota řídit na náměstí.
- Před každým otočením musí být dráp otevřen a zavřen a rameno musí být zvednuto a spuštěno.
- Clawbot nemůže jet po straně náměstí více než jednou.
- Jako výchozí bod můžete použít ukázkový projekt Opakující se akce (bez gyra), ale před provedením jakýchkoli změn jej uložte jakoSquaredLoops.

Ve svém technickém notebooku naplánujte následující:
- Naplánujte své řešení a předpovězte, co každý blok ve vašem projektu bude dělat Clawbot.
- Stáhněte si a spusťtesvůj projekt, abyste ho před odesláním otestovali.
- Podle potřeby provádějte změny v projektu a dělejte si poznámky o tom, co bylo během testování změněno.
![]() Řešení
–
pro učitele – sada nástrojů
Řešení
–
pro učitele – sada nástrojů
Následuje možné řešení výzvy Squared Loops:

Studentům můžete poskytnout programovací kritérium pro hodnocení jejich projektů. Klikněte na jeden z následujících odkazů (Google Doc / .docx / .pdf)
Studentské technické sešity lze spravovat a hodnotit jednotlivě (Google Doc / .docx / .pdf) nebo jako tým (Google Doc / .docx / .pdf).