
![]() نصائح المعلم
-
الغرض من هذا النشاط
نصائح المعلم
-
الغرض من هذا النشاط
يمكن إنجاز برمجة السلوكيات المتكررة باستخدام حلقات متكررة أو إلى الأبد. باختصار، تسمح الكتل المتكررة للمبرمج بتعيين عدد معين من المرات لتكرار الكتل داخل الحلقة. الكتلة الأبدية تكرر الكتل داخل الحلقة إلى الأبد، أو حتى يتم إيقاف المشروع. في هذا النشاط، يتعلم الطلاب عن كليهما.
لمزيد من المعلومات حول البرمجة مع حلقات متكررة أو إلى الأبد، قم بزيارة معلومات المساعدة داخل VEXcode V5.
فيما يلي ملخص لما سيفعله الطلاب في هذا النشاط:
-
شاهد الفيديو التعليمي باستخدام الحلقات.
-
استكشف مثال مشروع الإجراءات المتكررة (لا يوجد جيروسكوب).
-
قارن وتباين بين الكتل إلى الأبد والكتل المتكررة.
-
أكمل تحدي الحلقات المربعة الذي يطلب من الطلاب تحريك المخلب في مربع وعمل المخلب والذراع قبل كل منعطف.
V5 Clawbot جاهز للتحرك!
يمكنك استخدام معلومات التعليمات داخل VEXcode V5 للتعرف على الكتل. للحصول على إرشادات حول استخدام ميزة "المساعدة"، راجع البرنامج التعليمي "استخدام المساعدة".
![]() نصائح للمعلم
نصائح للمعلم
إذا كانت هذه هي المرة الأولى التي يستخدم فيها الطالب VEXcode V5، فيمكنه أيضًا مشاهدة البرامج التعليمية في شريط الأدوات لتعلم المهارات الأساسية الأخرى.
| الكمية | المواد اللازمة |
|---|---|
| 1 |
مجموعة VEX V5 Classroom Starter (مع برنامج ثابت محدث) |
| 1 |
VEXcode V5 (أحدث إصدار، Windows، MacOS، Chromebook) |
| 1 |
دفتر ملاحظات هندسي |
| 1 |
استخدام الحلقات (البرنامج التعليمي) |
| 1 |
مشروع مثال الإجراءات المتكررة (لا يوجد جيروسكوب) |
الخطوة 1: لنبدأ البرمجة بالحلقات.
- ابدأ بمشاهدة الفيديو التعليمي باستخدام الحلقات.
-
افتح مشروع مثال الإجراءات المتكررة (لا يوجد جيروسكوب).
-
عرض مثال المشروع المفتوح.
قم بما يلي في دفترك الهندسي.
-
تنبأ بما سيقوم به Clawbot في المشروع. اشرح أكثر من حقيقة أن المشروع يتكرر.
ما الذي يكرره ؟ ماذا يفعل المخلب ؟
- اكتب تنبؤك، ولكن لا تقسم المشروع القصير إلى أكثر من جزأين.
![]() صندوق أدوات المعلم
-
الإجابات
صندوق أدوات المعلم
-
الإجابات
-
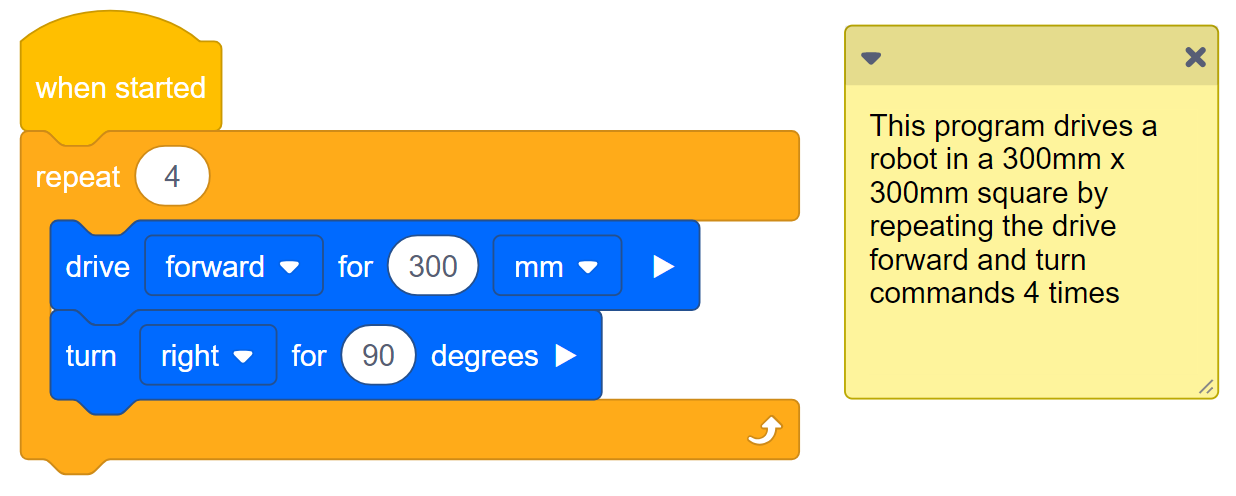
سيعمل هذا المشروع على دفع الروبوت للأمام لمسافة 300 ملليمتر ثم الانعطاف يمينًا 90 درجة 4 مرات لإكمال المربع. بدلاً من استخدام نفس الكتلتين 4 مرات، تقلل كتلة التكرار نفس الإجراءات التي ستستخدمها 8 كتل - إلى 3 كتل. تكرر كتلة التكرار إجراءات القيادة للأمام ثم الانعطاف.
-
قد يكون التنبؤ ببساطة "يتحرك المخلب في مربع". ستكون هذه طريقة موجزة لالتقاط الحركات المتكررة لـ Clawbot مع عدم وجود أي سياق.
يمكن الاحتفاظ بدفاتر ملاحظات الطلاب الهندسية وتسجيلها بشكل فردي (Google Doc / .docx / .pdf) أو كفريق واحد (Google Doc / .docx / .pdf). توفر الروابط السابقة نموذج تقييم مختلف لكل نهج. عندما يتم تضمين نموذج تقييم في التخطيط التعليمي، من الجيد شرح نموذج التقييم أو على الأقل إعطاء نسخ للطلاب قبل بدء النشاط.
-
احفظ مشروعمثال الإجراءات المتكررة (بدون جيروسكوب) وقم بتنزيله وتشغيله.

-
للحصول على المساعدة، راجع البرنامج التعليمي في VEXcode V5 الذي يشرح كيفية تنزيل المشروع وتشغيله.

- تحقق من شروحاتك للمشروع في دفترك الهندسي وأضف ملاحظات لتصحيحها حسب الحاجة.
الخطوة 2: قم بتشغيل المشروع وراقب الروبوت.
انظر إلى مشروع الإجراءات المتكررة (لا يوجد جيروسكوب) (على اليمين) مرة أخرى. سيقوم هذا المشروع
بتكرار التقدم ثم تحويل السلوك أربع مرات. يتم استخدام كتلة التكرار عندما تريد
استخدام مجموعة من السلوكيات لعدد معين من المرات. إذا تم
استبدال كتلة التكرار بكتلة إلى الأبد، فإن الروبوت سيكرر للأمام ثم يحول
السلوكيات إلى الأبد.
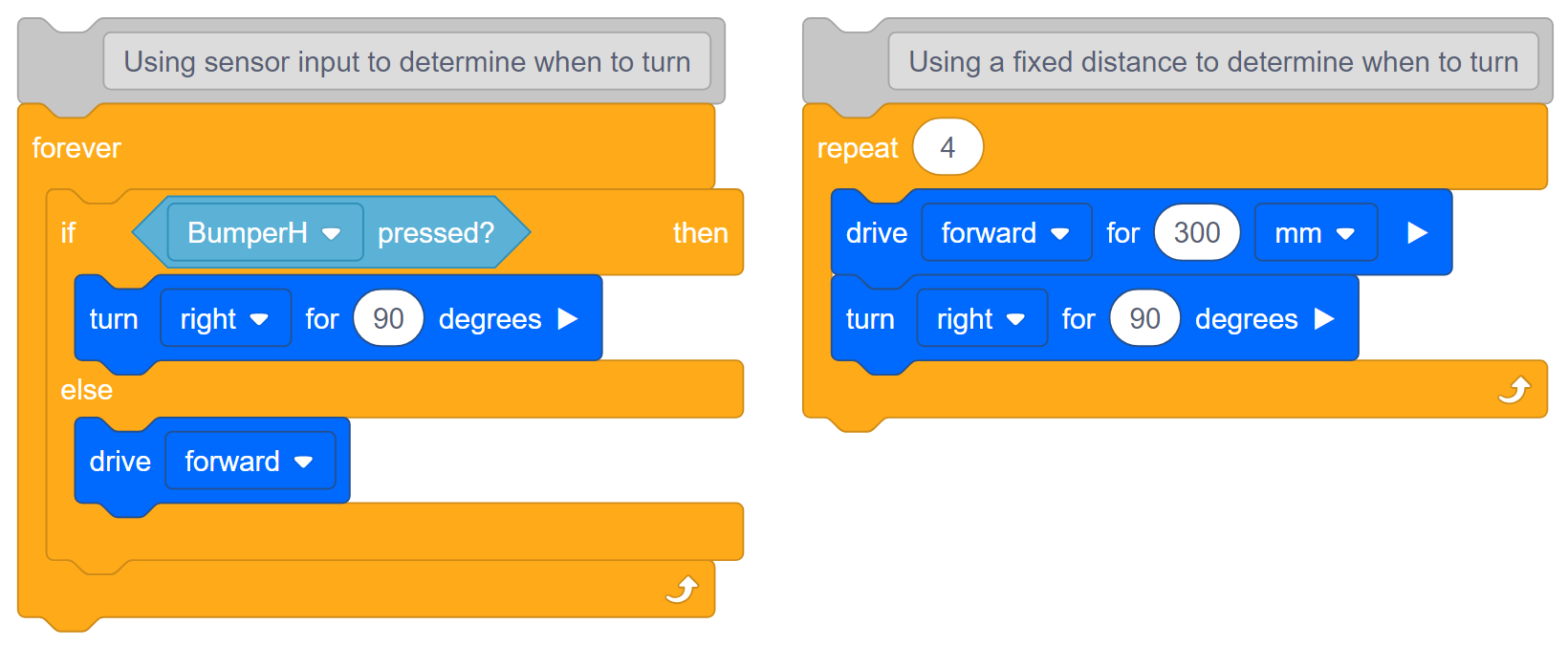
في المشروع على اليسار، يتم استخدام مدخلات المستشعر لتحديد وقت
بدء الدوران. يستخدم المشروع الموجود على اليمين مسافة مجموعة نقل حركة ثابتة لتحديد وقت بدء
الدوران. من
أجل التحقق باستمرار من دخل المستشعر، يتم استخدام كتلة if/else
مع كتلة دائمة. في المشروع على اليسار، سوف يتحول الروبوت إلى اليمين عند الضغط
على مستشعر BumperH، وإلا فإن الروبوت سوف يتحرك إلى الأمام إلى الأبد إذا
لم يتم الضغط على مستشعر BumperH. للتحقق باستمرار من قيمة مستشعر BumperH،
تكون كتلة if/then ضمن كتلة دائمة.
المشروع أعلاه على اليسار هو
حالة استخدام عملية لهيكل يتكرر إلى الأبد - باستخدام الكتل إلى
الأبد وإذا/ثم الكتل معًا. تخيل مكنسة ذاتية القيادة تستمر في القيادة للأمام حتى
تصطدم بجدار أو جسم، ثم تستدير قبل الاستمرار في القيادة.
![]() قم بتوسيع نطاق تعلمك
قم بتوسيع نطاق تعلمك
لمزيد من الاستكشاف باستخدام الحلقات ذات الشروط، قم ببناء مشروع مثال مكنسة الأرضية في VEXcode V5.

- ابدأ بجعل الطلاب يركبون مفاتيح المصد ويسلكونها.
-
اطلب من الطلاب فتح نموذج مشروع Clawbot (نظام نقل الحركة بمحركين، بدون جيروسكوب).
- اطلب من الطلاب بناء المشروع أعلاه.
-
اطلب من الطلاب حفظ المشروع ككنسة أرضية.

-
إذا كان الطلاب بحاجة إلى مساعدة في حفظ المشروع، فارجع إلى البرنامج التعليمي للتسمية والحفظ.

إذا كان الطلاب بحاجة إلى مساعدة في أي من المكوّنات، فقم بإحالتهم
إلى معلومات المساعدة أو البرنامج التعليمي.
اطلب من الطلاب تنزيل المشروع وتشغيله لمراقبة كيفية تحرك الروبوت. بعد
ذلك، ابدأ مناقشة في الفصل واطلب من الطلاب شرح سبب استخدام الكتلة الأبدية
بدلاً من كتلة التكرار. يجب على
الطلاب ملاحظة أنه يتم
استخدام كتلة دائمة لأن هذا المشروع يتحقق باستمرار لمعرفة ما إذا كان يتم
الضغط على مفتاح المصد.
الخطوة 3: تحدي الحلقات المربعة!

- اجعل محرك Clawbot الخاص بك في مربع.
- قبل كل منعطف، يجب فتح المخلب وإغلاقه، ويجب رفع الذراع وخفضه.
- لا يمكن لـ Clawbot القيادة على جانب من المربع أكثر من مرة.
- يمكنك استخدام مشروع مثال الإجراءات المتكررة (بدون جيروسكوب) كنقطة بداية ولكن احفظه كـ SquaredLoops قبل إجراء أي تغييرات.

في دفترك الهندسي، خطط لما يلي:
- خطط لحلك وتنبأ بما ستفعله كل كتلة في مشروعك مع Clawbot.
- قم بتنزيل وتشغيل مشروعك لاختباره قبل تقديمه.
- قم بإجراء تغييرات على المشروع حسب الحاجة وقم بتدوين الملاحظات حول ما تم تغييره أثناء الاختبار.
![]() صندوق أدوات المعلم
-
الحل
صندوق أدوات المعلم
-
الحل
فيما يلي حل محتمل لتحدي الحلقات المربعة:

يمكنك تزويد الطلاب بنموذج تقييم برمجي لتسجيل مشاريعهم. انقر فوق أحد الروابط
التالية (Google
Doc / .docx
/ .pdf)
يمكن الاحتفاظ بدفاتر ملاحظات
الطلاب الهندسية وتسجيلها بشكل فردي (Google
Doc / .docx
/ .pdf)
أو كفريق واحد (Google
Doc / .docx
/ .pdf).