
![]() เคล็ดลับสำหรับครู
-
จุดประสงค์ของกิจกรรมนี้
เคล็ดลับสำหรับครู
-
จุดประสงค์ของกิจกรรมนี้
การเขียนโปรแกรมพฤติกรรมซ้ำๆสามารถทำได้โดยการใช้ลูปซ้ำหรือตลอดไป ในระยะสั้น บล็อกที่ ทำซ้ำจะอนุญาตให้โปรแกรมเมอร์กำหนดจำนวนครั้งเฉพาะสำหรับบล็อกภายในลูปที่จะทำซ้ำ บล็อก ตลอดไปจะทำซ้ำบล็อกภายในลูปตลอดไปหรือจนกว่าโครงการจะหยุดลง ในกิจกรรมนี้นักเรียนจะได้เรียนรู้เกี่ยวกับทั้งสองอย่าง
สำหรับข้อมูลเพิ่มเติมเกี่ยวกับ การเขียนโปรแกรม ด้วย ลูปซ้ำ หรือตลอดไปโปรดไปที่ข้อมูล ความช่วยเหลือ ภายใน VEXcode V5
ต่อไปนี้เป็นโครงร่างของสิ่งที่นักเรียนจะทำในกิจกรรมนี้:
-
ดูวิดีโอ แนะนำ การใช้ลูป
-
สำรวจโครงการตัวอย่างการกระทำซ้ำ (ไม่มีไจโร)
-
เปรียบเทียบและเปรียบเทียบระหว่างบล็อก ตลอดไป และ บล็อก ซ้ำ
-
ทำการท้าทาย Squared Loops ที่ขอให้นักเรียนขยับ Clawbot ในรูปสี่เหลี่ยมจัตุรัสและดำเนินการกับกรงเล็บและแขนก่อนการหมุนแต่ละครั้ง
V5 Clawbot พร้อมที่จะเคลื่อนย้ายแล้ว!
คุณสามารถใช้ข้อมูลความช่วยเหลือภายใน VEXcode V5 เพื่อเรียนรู้เกี่ยวกับบล็อก สำหรับคำแนะนำในการใช้คุณลักษณะความช่วยเหลือโปรดดูบทแนะนำการใช้ความช่วยเหลือ
![]() เคล็ดลับสำหรับครู
เคล็ดลับสำหรับครู
หากนี่เป็นครั้งแรกที่นักเรียนใช้ VEXcode V5 พวกเขายังสามารถดูบทแนะนำในแถบเครื่องมือเพื่อเรียนรู้ทักษะพื้นฐานอื่นๆ
| จำนวน | วัสดุที่จำเป็น |
|---|---|
| 1 |
ชุดเริ่มต้นห้องเรียน VEX V5 (พร้อมเฟิร์มแวร์ล่าสุด) |
| 1 |
VEXcode V5 (เวอร์ชันล่าสุด, Windows, MacOS, Chromebook) |
| 1 |
สมุดบันทึกวิศวกรรม |
| 1 |
การใช้ลูป (บทแนะนำ) |
| 1 |
โครงการตัวอย่างการดำเนินการซ้ำ (ไม่มีไจโร) |
ขั้นตอนที่ 1: มาเริ่มเขียนโปรแกรมด้วยลูป
- เริ่มต้นด้วย การดูวิดีโอ แนะนำการใช้ลูป
-
เปิดโครงการ ตัวอย่างการกระ ทำซ้ำ (ไม่มีไจโร)
-
ดูตัวอย่างโปรเจกต์ที่เปิดอยู่
ทำสิ่งต่อไปนี้ในสมุดบันทึกวิศวกรรมของคุณ
-
คาดการณ์ว่าโปรเจกต์นี้จะให้ Clawbot ทำอะไร อธิบายมากกว่าความจริงที่ว่าโปรเจกต์ซ้ำแล้วซ้ำอีก
มันเกิดอะไรขึ้นซ้ำแล้วซ้ำอีก? Clawbot กำลังทำอะไรอยู่?
- เขียนคำทำนายของคุณแต่อย่าแบ่งโครงการระยะสั้นออกเป็นมากกว่าสองส่วน
![]() กล่องเครื่องมือครู
-
คำตอบ
กล่องเครื่องมือครู
-
คำตอบ
-
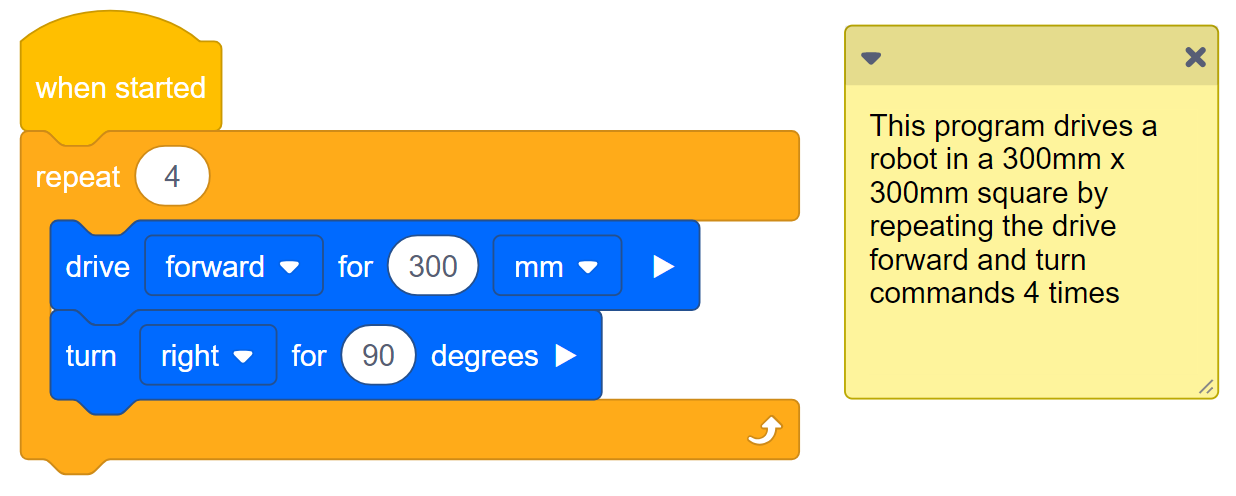
โปรเจกต์นี้จะให้หุ่นยนต์ขับเคลื่อนไปข้างหน้า 300 มิลลิเมตรแล้วเลี้ยวขวา 90 องศา 4 ครั้งเพื่อให้ได้สี่เหลี่ยมจัตุรัส แทนที่จะใช้ 2 บล็อกเดียวกัน 4 ครั้ง บล็อก ทำซ้ำจะลดการกระทำเดียวกันกับ 8 บล็อก - เป็น 3 บล็อก บล็อก ทำซ้ำจะทำซ้ำการกระทำของการขับรถไปข้างหน้าแล้วเลี้ยว
-
คำทำนายอาจเป็น "คลอว์บอทเคลื่อนไหวเป็นสี่เหลี่ยมจัตุรัส" นี่จะเป็นวิธีที่สั้นที่สุดในการจับภาพการเคลื่อนไหวซ้ำๆของ Clawbot ในขณะที่ขาดบริบทใดๆ
สมุดบันทึกวิศวกรรมของนักศึกษาสามารถได้รับการดูแลและให้คะแนน เป็น ราย บุคคล (Google Doc /.docx /.pdf) หรือเป็น ทีม ( Google Doc /.docx/.pdf) ลิงก์ก่อนหน้านี้ให้รูบริกที่แตกต่างกันสำหรับแต่ละวิธี เมื่อใดก็ตามที่มีรูบริกรวมอยู่ในการวางแผนการศึกษาเป็นแนวปฏิบัติที่ดีในการอธิบายรูบริกหรืออย่างน้อยก็ให้สำเนาแก่นักเรียนก่อนที่กิจกรรมจะเริ่มต้น
-
บันทึก ดาวน์โหลดและเรียกใช้โครงการตัวอย่างการดำเนินการซ้ำ (ไม่มี Gyro)

-
สำหรับความช่วยเหลือโปรดดูบทแนะนำใน VEXcode V5 ที่อธิบายวิธีการดาวน์โหลดและเรียกใช้โครงการ

- ตรวจสอบคำอธิบายของคุณเกี่ยวกับโครงการในสมุดบันทึกวิศวกรรมของคุณและเพิ่มบันทึกเพื่อแก้ไขตามความจำเป็น
ขั้นตอนที่ 2: เรียกใช้โครงการและสังเกตหุ่นยนต์
ดูที่โครงการการดำเนินการซ้ำ (ไม่มีไจโร) (ด้านขวา) อีกครั้ง
โครงการนี้จะทำซ้ำไปข้างหน้าแล้วเปลี่ยนพฤติกรรมสี่ครั้ง
บล็อกการ ทำซ้ำจะถูกใช้เมื่อคุณต้องการใช้ชุดของพฤติกรรมสำหรับจำนวนครั้งที่แน่นอน
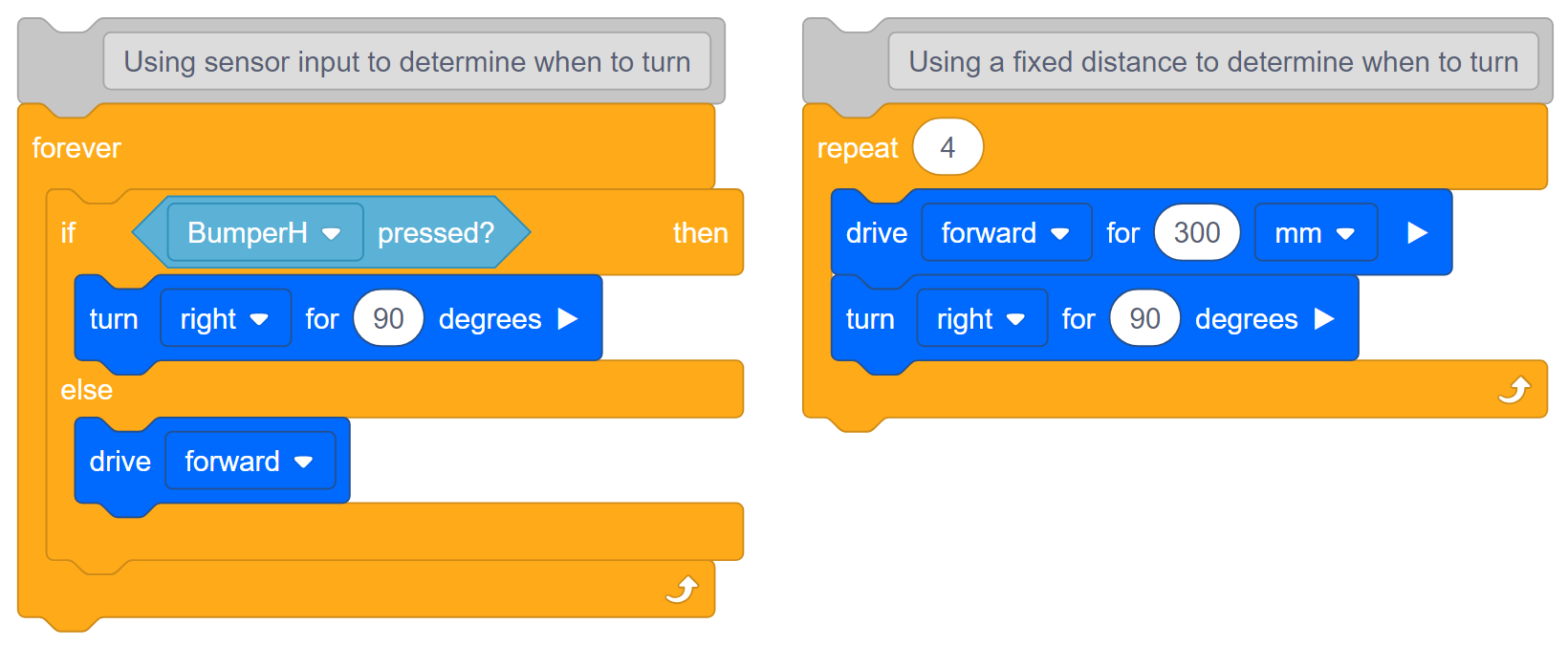
หาก บล็อกที่ ทำซ้ำถูกแทนที่ด้วย บล็อก ตลอดไปหุ่นยนต์จะทำซ้ำไปข้างหน้าและเปลี่ยนพฤติกรรมตลอดไป
ในโครงการทางด้านซ้ายอินพุตของเซ็นเซอร์จะถูกใช้เพื่อกำหนดเวลาที่จะเริ่มหมุน
โครงการทางด้านขวาใช้ระยะทาง Drivetrain
คงที่เพื่อกำหนดเวลาที่จะเริ่มเลี้ยว
เพื่อตรวจสอบอินพุตของเซ็นเซอร์อย่างต่อเนื่อง บล็อก if/else
จะถูกใช้ร่วมกับ บล็อก forever
ในโครงการทางซ้ายหุ่นยนต์จะเลี้ยวขวาเมื่อกด เซ็นเซอร์ BumperH
มิฉะนั้นหุ่นยนต์จะขับเคลื่อนไปข้างหน้าตลอดไป หากไม่กด เซ็นเซอร์ BumperH
ในการตรวจสอบ ค่าของ เซ็นเซอร์ BumperH อย่างต่อเนื่อง บล็อก if/then
จะอยู่ภายใน บล็อก forever
โครงการข้างต้นทางด้านซ้ายเป็นกรณีการใช้งานจริงของโครงสร้างที่ทำซ้ำตลอดไป
- โดยใช้ บล็อก ตลอดไปและ ถ้า/จากนั้น บล็อกเข้าด้วยกัน
ลองนึกภาพเครื่องกวาดแบบขับเคลื่อนด้วยตนเองที่ยังคงขับเคลื่อนไปข้างหน้าจนกว่ามันจะวิ่งเข้าไปในกำแพงหรือวัตถุจากนั้นเลี้ยวก่อนที่จะขับเคลื่อนต่อไป
![]() ขยายการเรียนรู้ของท่าน
ขยายการเรียนรู้ของท่าน
หากต้องการสำรวจเพิ่มเติมโดยใช้ลูปที่มีเงื่อนไขให้สร้างโครงการตัวอย่างเครื่องกวาดพื้นใน VEXcode V5

- เริ่มต้นด้วยการให้นักเรียน ติดตั้งและเดินสายสวิตช์กันชน
-
ขอให้นักเรียนเปิดโครงการตัวอย่าง Clawbot (Drivetrain 2 - motor, No Gyro)
- ขอให้นักเรียนสร้างโครงการด้านบน
-
ให้นักเรียนบันทึกโครงการเป็นเครื่องกวาดพื้น

-
หากนักเรียนต้องการความช่วยเหลือในการบันทึกโครงการโปรดดูบทช่วยสอนการตั้งชื่อและการบันทึก

หากนักเรียนต้องการความช่วยเหลือเกี่ยวกับบล็อคใดๆให้ดู ข้อมูล ความช่วยเหลือหรือบทช่วยสอน
ขอให้นักเรียน ดาวน์โหลดและเรียกใช้โครงการ เพื่อสังเกตว่าหุ่นยนต์เคลื่อนที่อย่างไร
จากนั้นเริ่มการสนทนาในชั้นเรียนและขอให้นักเรียนอธิบายว่าเหตุใดจึงใช้ บล็อก ตลอดไปแทนการใช้ บล็อก ซ้ำนักเรียน
ควรทราบว่ามีการใช้ บล็อก ตลอดไปเพราะโครงการนี้จะตรวจสอบอย่างต่อเนื่องเพื่อดูว่ามีการกดสวิตช์กันชนหรือไม่
ขั้นตอนที่ 3: การท้าทายลูปที่สอง!

- ให้ Clawbot ของคุณขับเป็นสี่เหลี่ยมจัตุรัส
- ก่อนการหมุนแต่ละครั้งกรงเล็บจะต้องเปิดและปิดและแขนจะต้องยกขึ้นและลดลง
- Clawbot ไม่สามารถขับรถไปตามด้านข้างของจัตุรัสได้มากกว่าหนึ่งครั้ง
- คุณสามารถใช้โครงการตัวอย่างการทำซ้ำ (ไม่มีไจโร) เป็นจุดเริ่มต้นแต่บันทึกเป็น SquaredLoops ก่อนทำการเปลี่ยนแปลงใดๆ

ในสมุดบันทึกวิศวกรรมของคุณให้วางแผนสิ่งต่อไปนี้:
- วางแผนโซลูชันของคุณและคาดการณ์ว่าแต่ละบล็อกในโปรเจกต์ของคุณจะให้ Clawbot ทำอะไร
- ดาวน์โหลดและเรียกใช้ โปรเจกต์ของคุณเพื่อทดสอบก่อนส่ง
- ทำการเปลี่ยนแปลงโครงการตามความจำเป็นและจดบันทึกเกี่ยวกับสิ่งที่มีการเปลี่ยนแปลงในระหว่างการทดสอบ
![]() กล่องเครื่องมือครู
- การ
แก้ปัญหา
กล่องเครื่องมือครู
- การ
แก้ปัญหา
ต่อไปนี้เป็นทางออกที่เป็นไปได้สำหรับการท้าทายลูปที่สอง:

คุณสามารถให้รูบริก การเขียนโปรแกรม สำหรับการให้คะแนนโปรเจกต์ของนักเรียนได้
คลิกหนึ่งในลิงก์ต่อไปนี้ (
Google
Doc /.docx
/.pdf) สมุดบันทึกวิศวกรรมของ
นักศึกษาสามารถได้รับการดูแลและให้คะแนน
เป็น ราย
บุคคล (Google
Doc /.docx /.pdf) หรือเป็น ทีม (
Google
Doc /.docx
/.pdf)