
Controller und Loops
In Wettbewerben müssen Teams ihre Roboter drahtlos mit Controllern manipulieren. Die Steuerung ist so programmiert, dass sie den Roboter auf Grundlage einer Eingabe des Benutzers aktualisiert. Schleifen werden im Projekt verwendet, so dass der Roboter wiederholt nach aktualisierten Eingabeinformationen sucht. Mithilfe von Schleifen kann das Projekt schnell überprüfen, welche Tasten gedrückt wurden oder wie weit die Joysticks gedrückt wurden. Nach der Überprüfung werden diese Informationen schnell an den Roboter weitergeleitet, damit er schnell auf die Anweisungen der Steuerung reagiert.
Das Folgende zeigt das Beispielprojekt Tank Control aus VEXcode V5. Die while True Endlosschleife in diesem Projekt überprüft die Positionen der Achsen 2 und 3 für immer, um die Geschwindigkeit der Motoren einzustellen.
# Library import
from vex import *
# Begin project code
# Main Controller loop to set motors to controller axis positions
while True:
left_motor.set_velocity(controller_1.axis3.position(), PERCENT)
right_motor.set_velocity(controller_1.axis2.position(), PERCENT)
left_motor.spin(FORWARD)
right_motor.spin(FORWARD)
wait(5, MSEC)Schleifen sind auch für die autonome Programmierung ohne Steuerung wichtig. Eine Schleife hilft, wiederholte Befehle innerhalb eines Projekts zu vereinfachen und zu organisieren.
![]() Erweitern Sie Ihr Lernen
Erweitern Sie Ihr Lernen
Um diese Aktivität zu erweitern, bitten Sie Ihre Schüler, die Unterschiede zwischen Arcade- und Panzerkontrolle zu untersuchen. Die Schüler können den Beispielprojekten in VEXcode V5 folgen.
Es gibt vier Beispielprojekte: Left Arcade, Right Arcade, Split Arcade und Tank Control. 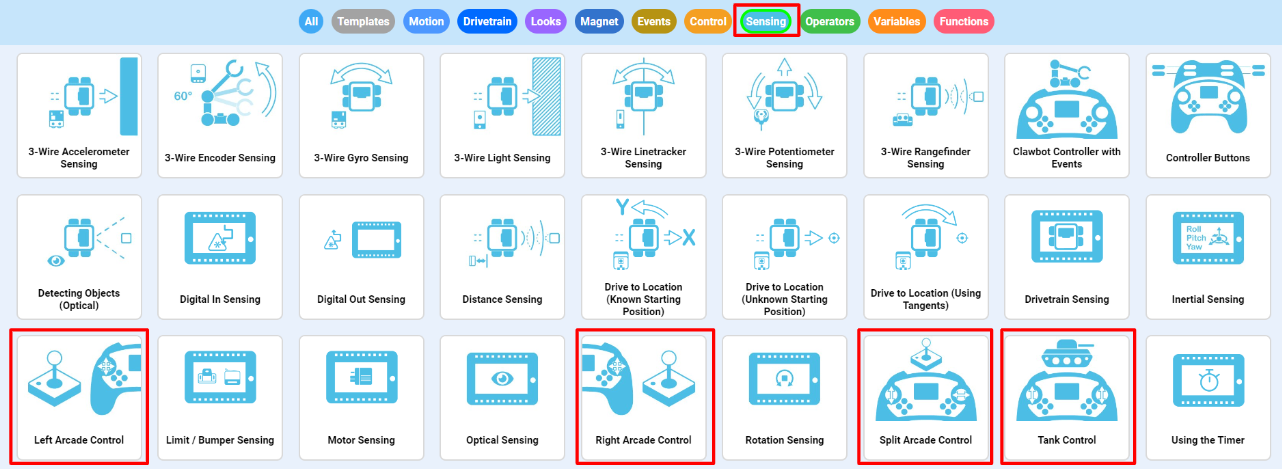
Besprechen Sie, wie die Schleifen innerhalb der Programme funktionieren, sowie die Vor- und Nachteile der einzelnen Kontrollarten.
Um diese Aktivität mit Mathematik in Verbindung zu bringen, verwenden Sie das linke/rechte Arcade- (ein Joystick) und das geteilte Arcade-/Tankantriebsprojekt (beide Joysticks) oben, um die Rollen der X- und Y-Achse innerhalb des Projekts zu besprechen.