
কন্ট্রোলার এবং লুপ - পাইথন
কন্ট্রোলার এবং লুপ
প্রতিযোগিতায়, দলগুলিকে তাদের রোবটগুলিকে তারবিহীনভাবে কন্ট্রোলার দিয়ে পরিচালনা করতে হবে। ব্যবহারকারীর ইনপুটের উপর ভিত্তি করে রোবটটিকে আপডেট করার জন্য কন্ট্রোলারটি প্রোগ্রাম করা হয়েছে। প্রকল্পটিতে লুপ ব্যবহার করা হয়েছে যাতে রোবট বারবার আপডেট হওয়া ইনপুট তথ্য পরীক্ষা করে। লুপগুলি প্রকল্পটিকে দ্রুত পরীক্ষা করতে সাহায্য করে যে কোন বোতাম টিপানো হয়েছে, অথবা জয়স্টিকগুলি কতদূর চাপানো হয়েছে। একবার চেক করার পর, এই তথ্য দ্রুত রোবটে পাঠানো হয় যাতে এটি নিয়ন্ত্রকের নির্দেশাবলীর প্রতি দ্রুত সাড়া দেয়।
নিম্নলিখিতটি VEXcode V5 থেকে ট্যাঙ্ক নিয়ন্ত্রণ প্রকল্পের উদাহরণ দেখায়। এই প্রকল্পের while Trueঅসীম লুপ মোটরগুলির বেগ নির্ধারণের জন্য অক্ষ 2 এবং 3 এর অবস্থান চিরতরে পরীক্ষা করে।
# লাইব্রেরি ইমপোর্ট
থেকে ভেক্স ইমপোর্ট *
# বিগিন প্রজেক্ট কোড
# মোটরগুলিকে কন্ট্রোলার অক্ষ পজিশন
সেট করার জন্য প্রধান কন্ট্রোলার লুপ যখন True:
left_motor.set_velocity(controller_1.axis3.position(), PERCENT)
right_motor.set_velocity(controller_1.axis2.position(), PERCENT)
left_motor.spin(FORWARD)
right_motor.spin(FORWARD)
wait(5, MSEC)কন্ট্রোলার ছাড়াই স্বায়ত্তশাসিত প্রোগ্রামিংয়ের জন্যও লুপগুলি গুরুত্বপূর্ণ। একটি লুপ একটি প্রকল্পের মধ্যে বারবার কমান্ডগুলিকে সরলীকরণ এবং সংগঠিত করতে সাহায্য করে।
![]() তোমার শেখার পরিধি বাড়াও
তোমার শেখার পরিধি বাড়াও
এই কার্যকলাপটি সম্প্রসারিত করার জন্য, আপনার শিক্ষার্থীদের আর্কেড নিয়ন্ত্রণ এবং ট্যাঙ্ক নিয়ন্ত্রণের মধ্যে পার্থক্যগুলি অন্বেষণ করতে বলুন। শিক্ষার্থীরা VEXcode V5-এ পাওয়া উদাহরণ প্রকল্পগুলি অনুসরণ করতে পারে।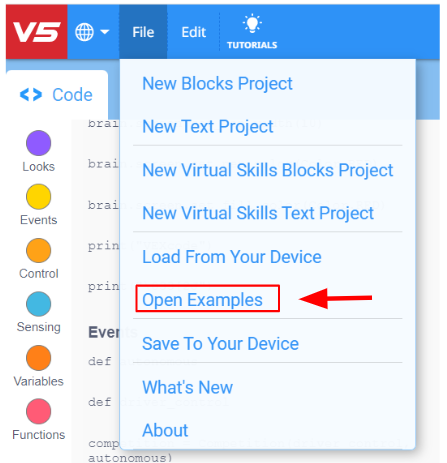
চারটি উদাহরণ প্রকল্প রয়েছে: বাম আর্কেড, ডান আর্কেড, স্প্লিট আর্কেড এবং ট্যাঙ্ক নিয়ন্ত্রণ।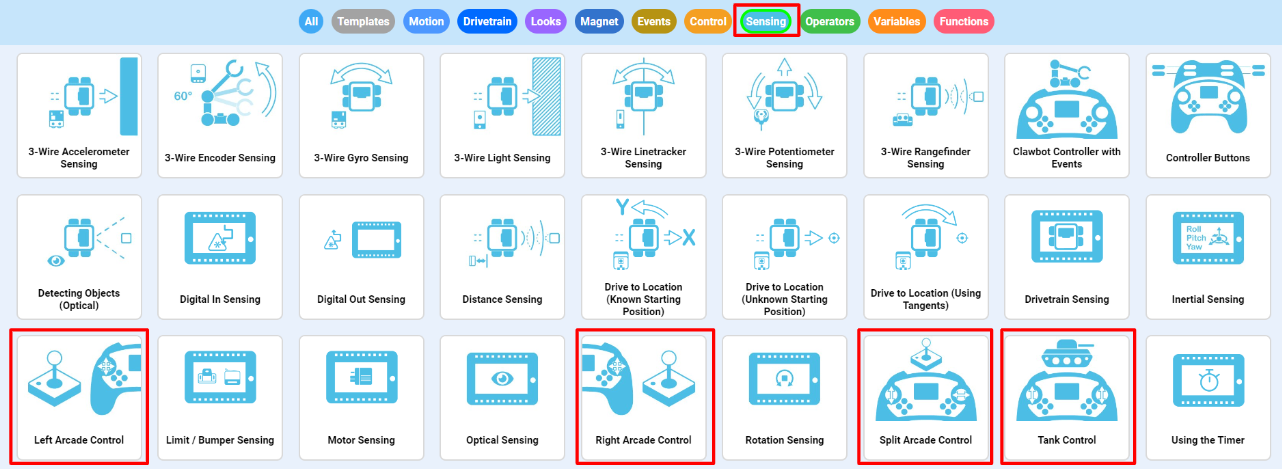
প্রোগ্রামগুলির মধ্যে লুপগুলি কীভাবে কাজ করে, সেইসাথে প্রতিটি ধরণের নিয়ন্ত্রণের সুবিধা এবং অসুবিধাগুলি নিয়ে আলোচনা করুন।
এই কার্যকলাপটিকে গণিতের সাথে সম্পর্কিত করতে, প্রকল্পের মধ্যে X এবং Y অক্ষের ভূমিকা নিয়ে আলোচনা করতে উপরে বাম/ডান আর্কেড (একটি জয়স্টিক) এবং স্প্লিট আর্কেড/ট্যাঙ্ক ড্রাইভ (উভয় জয়স্টিক) প্রকল্পগুলি ব্যবহার করুন।