
CS Level 1 - Blok VR VEXcode
9 Satuan
Mulailah perjalanan mempelajari Ilmu Komputer dengan kursus VEXcode VR Ilmu Komputer Level 1 - Blok! Dengan menggunakan VEXcode VR dan aktivitas berbasis robotika yang menarik, siswa akan belajar tentang alur proyek, loop, kondisi, dan algoritma.
Akses pengembangan profesional berkelanjutan untuk mendukung Anda saat Anda mengajar dengan VEXcode VR. PD yang tepat waktu dan tepat sasaran melalui video, pelajaran, percakapan komunitas, dan banyak lagi!
Pelajari Lebih Lanjut tentang Pengembangan Profesional Plus >
Satuan 1
Pendahuluan dan Dasar-Dasar
Unit ini menunjukkan kepada Anda nilai VEXcode VR dan betapa mudahnya menggunakannya. Unit ini juga menguraikan struktur kursus, memberi Anda gambaran tentang apa yang diharapkan, dan memberi Anda alat untuk meraih keberhasilan.

Satuan 2
Memindahkan Robot Anda
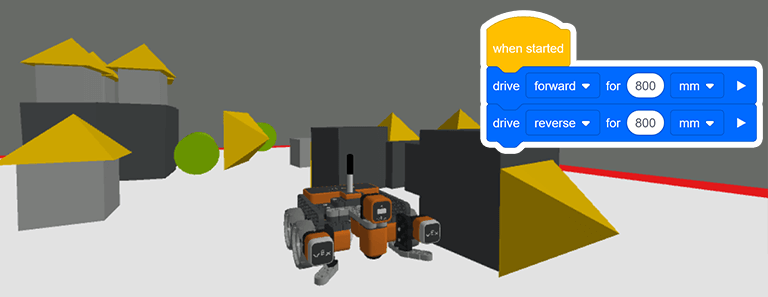
Dalam Unit ini, Anda akan menyelesaikan tantangan Castle Crasher. Anda akan mempelajari cara menggunakan VEXcode VR untuk membuat Robot VR menggunakan perintah Drivetrain untuk bergerak di sekitar Castle Crasher Playground. Anda juga akan belajar cara mengurutkan perintah dengan benar untuk merobohkan semua istana di taman bermain.

Satuan 3
Perilaku Berulang
Pada Unit ini, Anda akan menyelesaikan Tantangan Menggambar Rumah. Anda akan mempelajari cara menggunakan alat Pena pada Robot VR untuk menggambar berbagai bentuk di Art Canvas Playground. Anda juga akan mempelajari cara menggunakan loop dalam VEXcode VR untuk mengulang serangkaian perilaku beberapa kali, seperti menggambar sisi persegi.
Satuan 4
Menavigasi Labirin
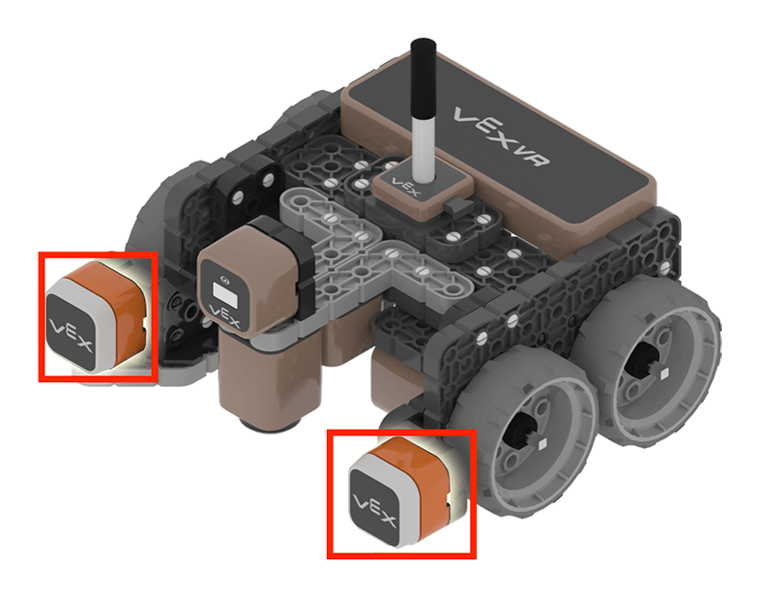
Unit ini akan menunjukkan kepada Anda cara menggunakan input sensor untuk menavigasi Robot VR tanpa mempedulikan lingkungan sekitarnya, alih-alih melakukan "hard-coding" pergerakan hanya dengan perintah Drivetrain. Ini adalah langkah awal yang penting untuk dapat membangun algoritma yang efektif. Anda akan mengerjakan Wall Maze Challenge menggunakan VEXcode VR untuk menavigasi Robot VR melalui Wall Maze Playground dari awal hingga akhir. Anda akan mempelajari cara menggunakan Bumper Sensor dan blok [Tunggu sampai] untuk menyelesaikan Tantangan Labirin Dinding.
Satuan 5
Mendeteksi Dinding dari Jarak Jauh
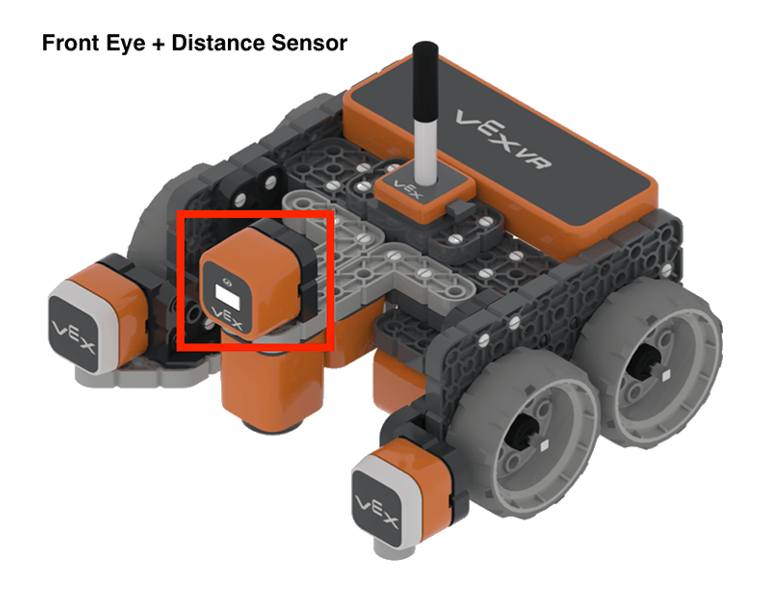
Dalam Unit ini, Anda akan menavigasi Robot VR dari awal hingga akhir melalui Tantangan Labirin Dinding tanpa menabrak dinding! Anda akan mempelajari cara menggunakan Sensor Jarak pada Robot VR dengan blok perbandingan untuk menyelesaikan tantangan Labirin Dinding.
Satuan 6
Mengetahui Lokasi Anda
Dalam Unit ini, Anda akan menyelesaikan tantangan Berkendara ke Tiga Angka dan menggunakan Sensor Lokasi untuk menavigasi Robot VR ke tiga lokasi bernomor berbeda di Taman Bermain Peta Kisi Angka! Anda akan menerapkan blok dari kategori Drivetrain, Sensing, dan Control dalam urutan yang benar untuk menyelesaikan tantangan Drive to Three Numbers.
Satuan 7
Keputusan dengan Warna
Dalam Unit ini, Anda akan diperkenalkan pada pentingnya pernyataan kondisional. Anda akan mengeksplorasi mengapa pernyataan kondisional, seperti blok [Jika, maka] perlu digunakan dengan perulangan, seperti blok [Selamanya], agar Robot VR dapat berperilaku sebagaimana mestinya. Anda akan mempelajari cara menggunakan Sensor Mata dan pernyataan kondisional untuk menyelesaikan Tantangan Labirin Cakram. Dalam Tantangan Disk Maze, Robot VR akan menavigasi melalui Disk Maze Playground dari awal hingga akhir menggunakan Sensor Mata untuk mendeteksi warna.

Satuan 8
Memindahkan Disk dengan Loop
Dalam Unit ini, Anda akan mempelajari pentingnya umpan balik sensor dan loop bersarang. Anda akan mempelajari cara menggunakan Elektromagnet pada Robot VR untuk mengambil dan menjatuhkan cakram guna menyelesaikan tantangan Pemindah Cakram. Anda akan menerapkan keterampilan yang dipelajari di Unit sebelumnya untuk membuat proyek VEXcode VR yang menggunakan Sensor Robot VR dan loop untuk memecahkan Tantangan Penggerak Disk.
Satuan 9
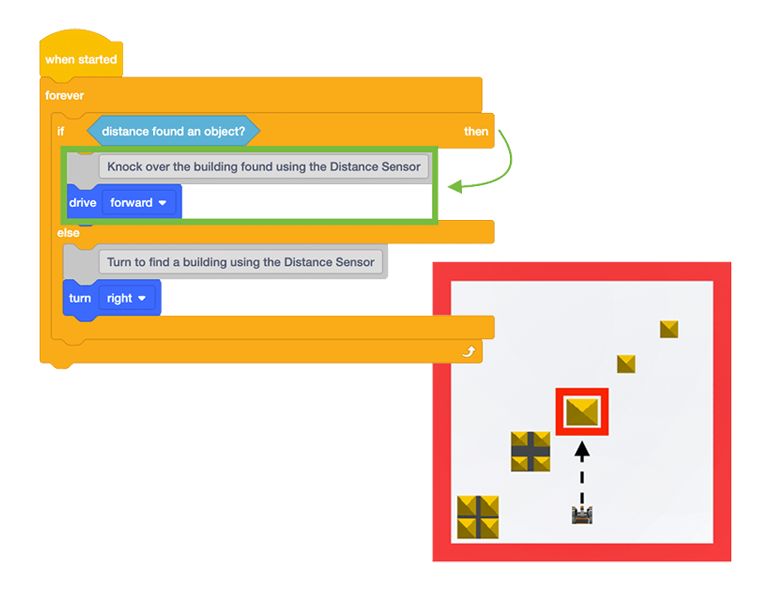
Mengembangkan Algoritma
Unit ini memperkenalkan Anda pada algoritma. Kembali di Unit 2, Anda menyelesaikan Tantangan Castle Crasher di Taman Bermain yang tata letaknya tidak berubah. Dalam Unit ini, Anda harus menyelesaikan tantangan yang sama, tetapi di Taman Bermain yang tata letaknya berubah setiap kali disetel ulang. Hal ini menimbulkan perlunya suatu algoritma yang menggunakan umpan balik sensor, bukan serangkaian perintah sederhana.

Batu penjuru
Pembersihan Terumbu Karang
Terapkan semua yang telah Anda pelajari pada tantangan terbuka di dunia nyata! Kodekan Robot VR Anda untuk mengumpulkan sampah sebanyak mungkin dari terumbu karang sebelum baterai pada robot pembersih laut habis