
CS Nível 1 - Blocos VEXcode VR
9 Unidades
Comece a jornada para aprender Ciência da Computação com o curso VEXcode VR Computer Science Level 1 - Blocks! Usando o VEXcode VR e envolvendo atividades baseadas em robótica, os alunos aprenderão sobre o fluxo do projeto, loops, condicionais, algoritmos.
Aceda ao desenvolvimento profissional contínuo para o apoiar enquanto ensina com o VEXcode VR. PD atempada e direcionada através de vídeos, aulas, conversas na comunidade e muito mais!
Unidade 1
Introdução e Fundamentos
Esta unidade mostra o valor do VEXcode VR e como é fácil de usar. Esta unidade também descreve a estrutura do curso, dando-lhe uma prévia do que é de se esperar, e fornecendo-lhe as ferramentas para ser bem sucedido.

Unidade 2
Movendo o seu robô
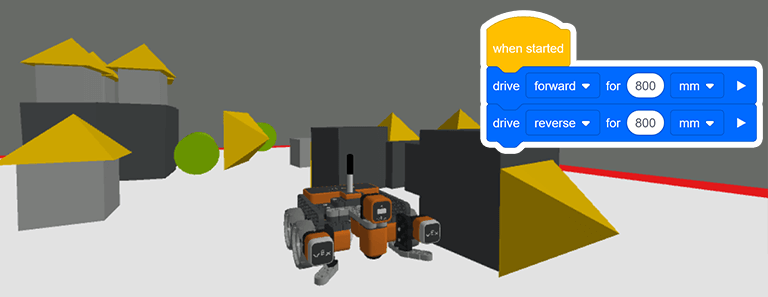
Nesta Unidade, você resolverá o desafio Castle Crasher. Você aprenderá a usar o VEXcode VR para fazer com que o robô VR use os comandos Drivetrain para se mover pelo Castle Crasher Playground. Você também aprenderá a sequenciar comandos corretamente para derrubar todos os castelos no parquinho.

Unidade 3
Comportamentos repetidos
Nesta Unidade, você resolverá o Desafio Desenhar uma Casa. Você aprenderá a usar a ferramenta Caneta em um Robô de RV para desenhar diferentes formas no Art Canvas Playground. Você também aprenderá a usar loops no VEXcode VR para repetir um conjunto de comportamentos várias vezes, como desenhar os lados de um quadrado.
Unidade 4
Navegar num Labirinto
Esta unidade mostrará como usar a entrada do sensor para navegar no robô VR, independentemente do ambiente, em vez de "codificar" o movimento apenas com comandos do sistema de transmissão. Este é um primeiro passo importante para poder construir um algoritmo eficaz. Você trabalhará no Wall Maze Challenge usando o VEXcode VR para navegar o robô VR pelo Wall Maze Playground do início ao fim. Você aprenderá a usar o Sensor de Para-choque e o bloco [Espere até] para resolver o Desafio do Labirinto da Parede.
Unidade 5
Detectando Paredes à Distância
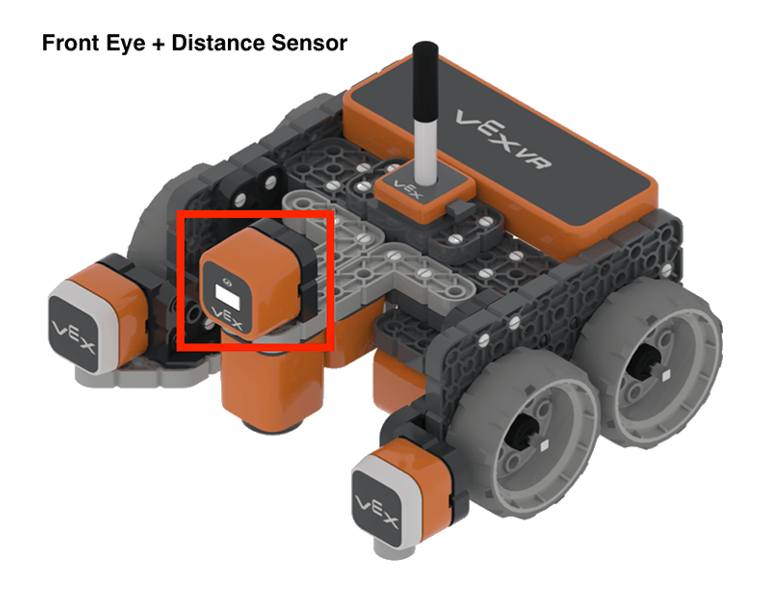
Nesta Unidade, você navegará pelo Robô de RV do início ao fim através do Desafio Labirinto da Parede sem esbarrar nas paredes! Você aprenderá a usar o Sensor de Distância no Robô VR com blocos de comparação para resolver o desafio do Labirinto da Parede.
Unidade 6
Conhecer a sua localização
Nesta Unidade, você completará o desafio Drive to Three Numbers e usará o Sensor de Localização para navegar o Robô VR para três locais numerados diferentes no Playground Number Grid Map! Você aplicará blocos das categorias Drivetrain, Sensing e Control na sequência correta para resolver o desafio Drive to Three Numbers.
Unidade 7
Decisões com Cores
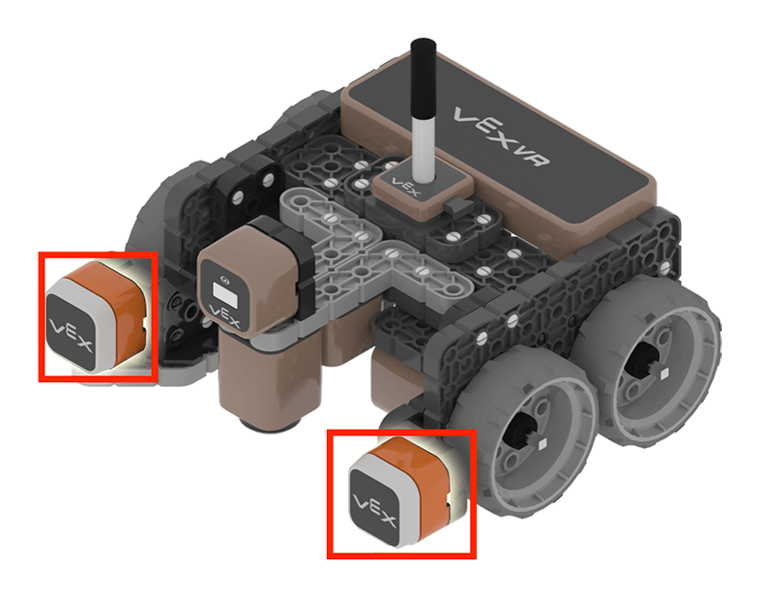
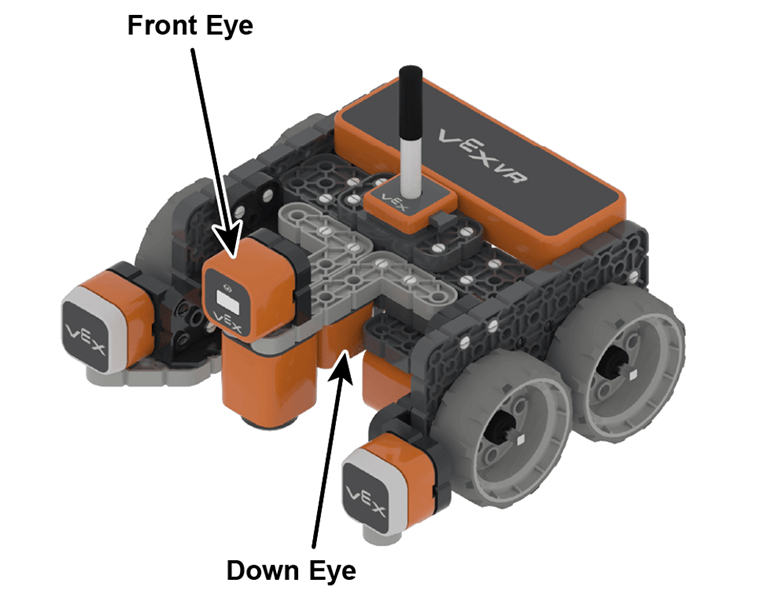
Nesta unidade, você será apresentado à importância das declarações condicionais. Você explorará por que instruções condicionais, como o bloco [If then], precisam ser usadas com loops, como blocos [Forever], para que o Robô de RV se comporte como pretendido. Você aprenderá a usar o sensor ocular e as instruções condicionais para resolver o desafio do labirinto de disco. No Desafio do Labirinto de Disco, o Robô de RV navegará pelo Playground do Labirinto de Disco do início ao fim usando o Sensor de Olhos para detectar cores.

Unidade 8
Mover discos com loops
Nesta unidade, você aprenderá a importância do feedback do sensor e dos loops de aninhamento. Você aprenderá a usar o eletroímã no robô VR para pegar e soltar discos para resolver o desafio do Disk Mover. Você aplicará as habilidades aprendidas nas Unidades anteriores para criar um projeto VEXcode VR que usa sensores e loops de robôs VR para resolver o desafio Disk Mover.
Unit 9
Desenvolvimento de Algoritmos
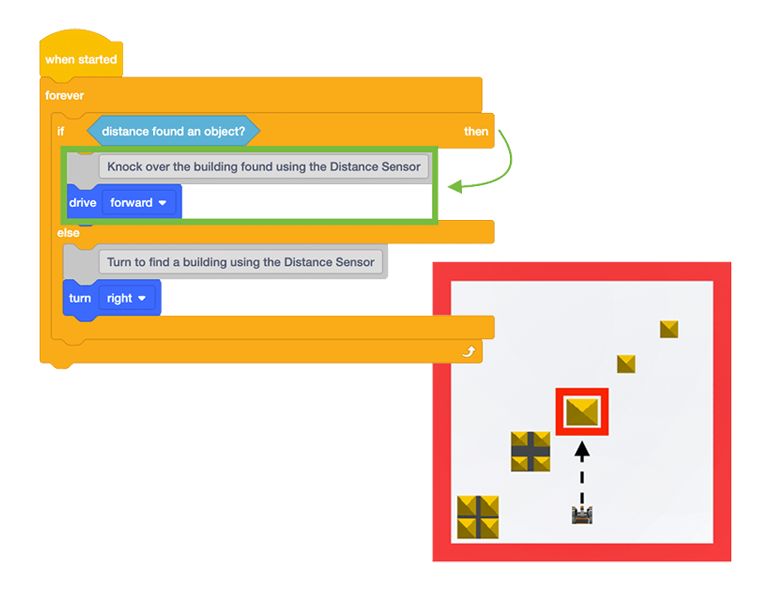
Esta unidade apresenta algoritmos. Na Unidade 2, você resolveu o Desafio Castle Crasher em um Playground onde o layout não mudou. Nesta Unidade, você terá que resolver o mesmo desafio, mas em um Playground que muda o layout a cada reinicialização. Isso introduz a necessidade de um algoritmo que use feedback do sensor em vez de uma sequência de comandos simples.

Pedra angular
Limpeza de recifes de coral
Aplique tudo o que aprendeu a um desafio aberto do mundo real! Programe o seu robô VR para recolher o máximo de lixo possível do recife de coral antes que a bateria do robô de limpeza oceânica acabe.