
सीएस स्तर 1 - VEXcode VR ब्लॉक
9 इकाइयों
VEXcode VR कंप्यूटर विज्ञान स्तर 1 - ब्लॉक पाठ्यक्रम के साथ कंप्यूटर विज्ञान सीखने की यात्रा शुरू करें! VEXcode VR और रोबोटिक्स-आधारित गतिविधियों का उपयोग करके, छात्र परियोजना प्रवाह, लूप, कंडीशनल, एल्गोरिदम के बारे में सीखेंगे।
VEXcode VR के साथ पढ़ाते समय आपको समर्थन देने के लिए चल रहे व्यावसायिक विकास तक पहुंचें। वीडियो, पाठ, सामुदायिक वार्तालाप और बहुत कुछ के माध्यम से समय पर और लक्षित पीडी!
इकाई 1
परिचय और मूल बातें
यह इकाई आपको VEXcode VR का मूल्य और इसका उपयोग कितना आसान है, दिखाती है। यह इकाई पाठ्यक्रम की संरचना की रूपरेखा भी प्रस्तुत करती है, आपको अपेक्षित बातों का पूर्वावलोकन प्रदान करती है, तथा सफल होने के लिए आवश्यक साधन उपलब्ध कराती है।

इकाई 2
अपने रोबोट को स्थानांतरित करना
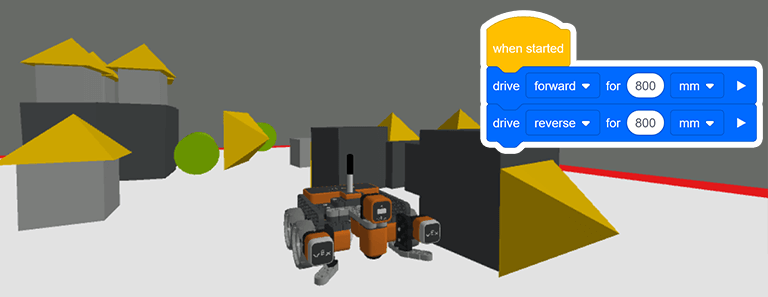
इस यूनिट में, आप कैसल क्रैशर चुनौती को हल करेंगे। आप सीखेंगे कि कैसल क्रैशर प्लेग्राउंड में घूमने के लिए VR रोबोट को ड्राइवट्रेन कमांड का उपयोग करने के लिए VEXcode VR का उपयोग कैसे करें। आप यह भी सीखेंगे कि खेल के मैदान पर सभी किलों को गिराने के लिए आदेशों को सही ढंग से कैसे क्रमबद्ध किया जाए।

इकाई 3
दोहराए जाने वाले व्यवहार
इस इकाई में, आप एक घर बनाएं चुनौती को हल करेंगे। आप सीखेंगे कि आर्ट कैनवास प्लेग्राउंड पर विभिन्न आकृतियाँ बनाने के लिए वीआर रोबोट पर पेन टूल का उपयोग कैसे करें। आप यह भी सीखेंगे कि VEXcode VR में लूप्स का उपयोग करके किसी व्यवहार को कई बार कैसे दोहराया जाए, जैसे कि किसी वर्ग की भुजाओं को खींचना।
इकाई 4
भूलभुलैया में नेविगेट करना
यह इकाई आपको दिखाएगी कि केवल ड्राइवट्रेन कमांड के साथ "हार्ड-कोडिंग" आंदोलन के बजाय, अपने आस-पास की स्थिति की परवाह किए बिना वीआर रोबोट को नेविगेट करने के लिए सेंसर इनपुट का उपयोग कैसे करें। यह एक प्रभावी एल्गोरिथम बनाने में सक्षम होने के लिए एक महत्वपूर्ण पहला कदम है। आप वॉल मेज़ चैलेंज पर VEXcode VR का उपयोग करते हुए वॉल मेज़ प्लेग्राउंड में शुरू से अंत तक VR रोबोट को नेविगेट करेंगे। आप सीखेंगे कि वॉल मेज़ चैलेंज को हल करने के लिए बम्पर सेंसर और [वेट अनटिल] ब्लॉक का उपयोग कैसे करें।
इकाई 5
दूर से दीवारों का पता लगाना
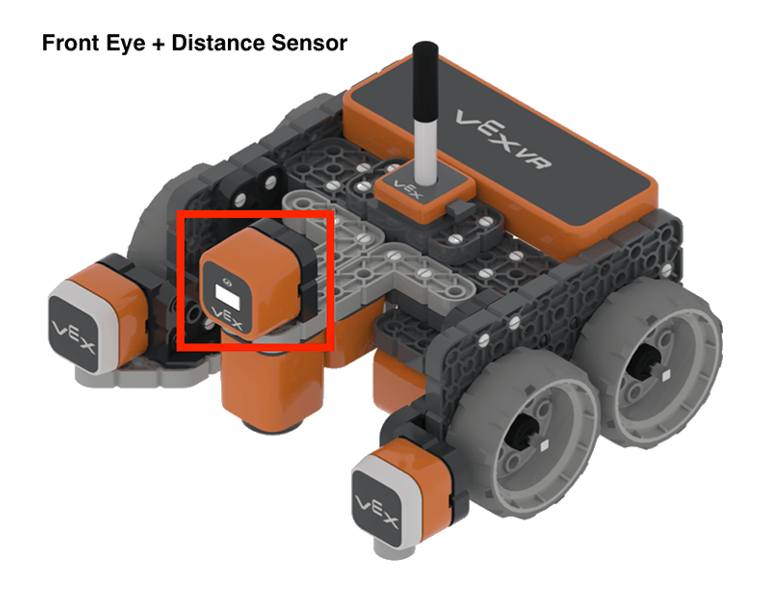
इस यूनिट में, आप दीवारों से टकराए बिना, वॉल मेज़ चैलेंज के माध्यम से शुरू से अंत तक वीआर रोबोट को नेविगेट करेंगे! आप सीखेंगे कि वॉल मेज़ चुनौती को हल करने के लिए तुलनात्मक ब्लॉकों के साथ वीआर रोबोट पर डिस्टेंस सेंसर का उपयोग कैसे करें।
इकाई 6
अपना स्थान जानना
इस यूनिट में, आप ड्राइव टू थ्री नंबर्स चुनौती को पूरा करेंगे और नंबर ग्रिड मैप प्लेग्राउंड पर तीन अलग-अलग क्रमांकित स्थानों पर वीआर रोबोट को नेविगेट करने के लिए स्थान सेंसर का उपयोग करेंगे! ड्राइव टू थ्री नंबर्स चुनौती को हल करने के लिए आप ड्राइवट्रेन, सेंसिंग और कंट्रोल श्रेणियों से ब्लॉकों को सही क्रम में लागू करेंगे।
इकाई 7
रंगों के साथ निर्णय
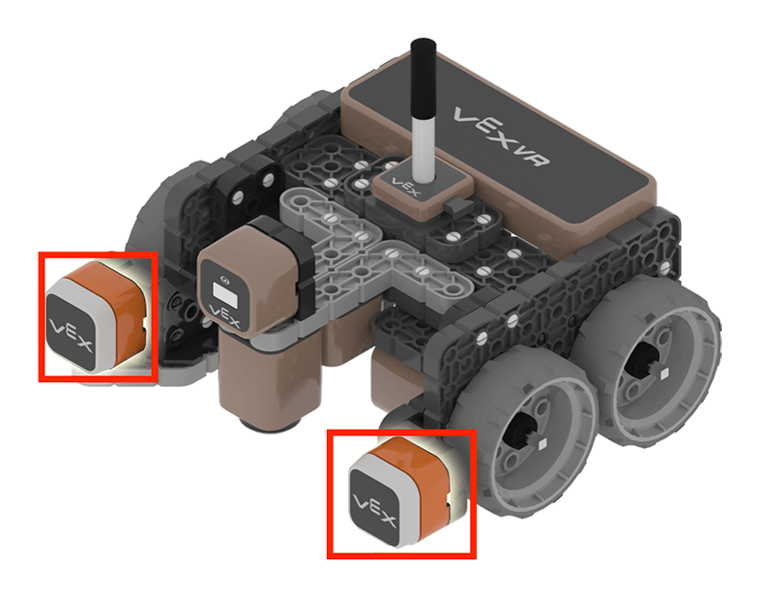
इस इकाई में आपको सशर्त कथनों के महत्व से परिचित कराया जाएगा। आप यह पता लगाएंगे कि सशर्त कथन, जैसे कि [यदि तो] ब्लॉक को लूप के साथ उपयोग करने की आवश्यकता क्यों है, जैसे कि [हमेशा] ब्लॉक, ताकि वीआर रोबोट इच्छित तरीके से व्यवहार कर सके। आप सीखेंगे कि डिस्क मेज़ चैलेंज को हल करने के लिए आई सेंसर और सशर्त कथनों का उपयोग कैसे करें। डिस्क मेज़ चैलेंज में, वीआर रोबोट रंगों का पता लगाने के लिए आई सेंसर का उपयोग करके डिस्क मेज़ खेल के मैदान में शुरू से अंत तक नेविगेट करेगा।

इकाई 8
लूप्स के साथ डिस्क को स्थानांतरित करना
इस इकाई में, आप सेंसर फीडबैक और नेस्टिंग लूप के महत्व के बारे में जानेंगे। आप सीखेंगे कि डिस्क मूवर चुनौती को हल करने के लिए डिस्क को उठाने और छोड़ने के लिए वीआर रोबोट पर इलेक्ट्रोमैग्नेट का उपयोग कैसे करें। आप पिछले यूनिटों में सीखे गए कौशल का उपयोग करके एक VEXcode VR प्रोजेक्ट बनाएंगे, जो डिस्क मूवर चैलेंज को हल करने के लिए VR रोबोट सेंसर और लूप का उपयोग करता है।
इकाई 9
एल्गोरिदम विकसित करना
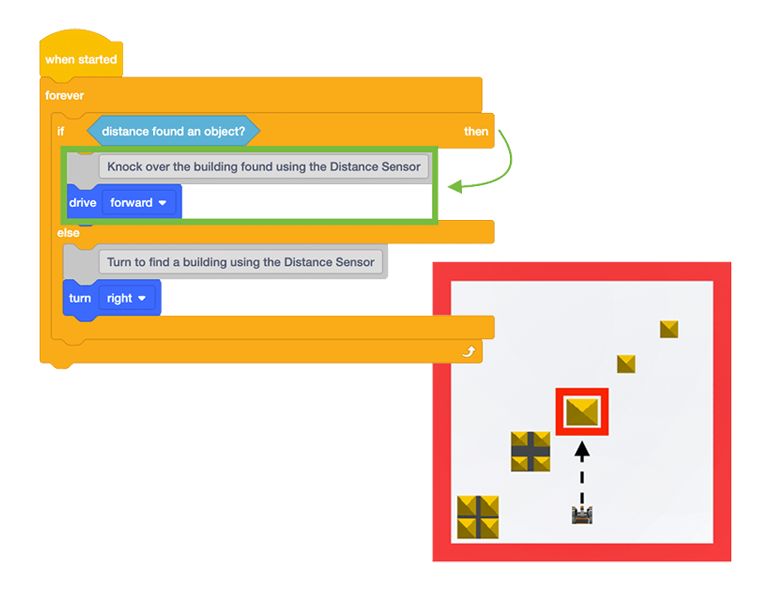
यह इकाई आपको एल्गोरिदम से परिचित कराती है। यूनिट 2 में आपने कैसल क्रैशर चैलेंज को ऐसे खेल के मैदान पर हल किया था, जहां लेआउट में कोई बदलाव नहीं हुआ था। इस यूनिट में, आपको वही चुनौती हल करनी होगी, लेकिन एक ऐसे खेल के मैदान पर जिसका लेआउट प्रत्येक रीसेट के साथ बदलता है। इससे एक ऐसे एल्गोरिदम की आवश्यकता उत्पन्न होती है जो सरल आदेशों के अनुक्रम के बजाय सेंसर फीडबैक का उपयोग करता है।

कैपस्टोन
प्रवाल भित्तियों की सफाई
जो कुछ भी आपने सीखा है उसे वास्तविक दुनिया की खुली चुनौती पर लागू करें! अपने VR रोबोट को कोड करें ताकि वह समुद्र सफाई रोबोट की बैटरी खत्म होने से पहले मूंगा चट्टान से जितना संभव हो सके उतना कचरा इकट्ठा कर सके