
Lección 3: Resumen posterior al proyecto
¿Por qué el robot VR siguió conduciendo cuando llegó al disco verde?
Cuando se ejecuta este proyecto, el robot VR continúa avanzando incluso cuando choca con el primer disco verde, como se muestra en el video a continuación.
Archivo de vídeo
Este proyecto solo indica al robot de realidad virtual que verifique las condiciones de cada declaración if else una vez al comienzo del proyecto.
La declaración if es diferente del bucle while
- Mientras que los bucles no requieren que el robot VR tome una decisión. Cuando la condición es Verdadera, el bucle while con una condición not ejecuta el siguiente comando fuera del bucle. Cuando la condición es Falsa, el bucle while con una condición not continúa esperando hasta que la condición sea Verdadera y detiene la ejecución del resto del proyecto.

- Si las declaraciones requieren que el robot VR tome una decisión. Si la condición es Verdadero, entonces se ejecutan los comandos dentro de la instrucción if. Si la condición es False, entonces los comandos dentro de la instrucción if no se ejecutan.
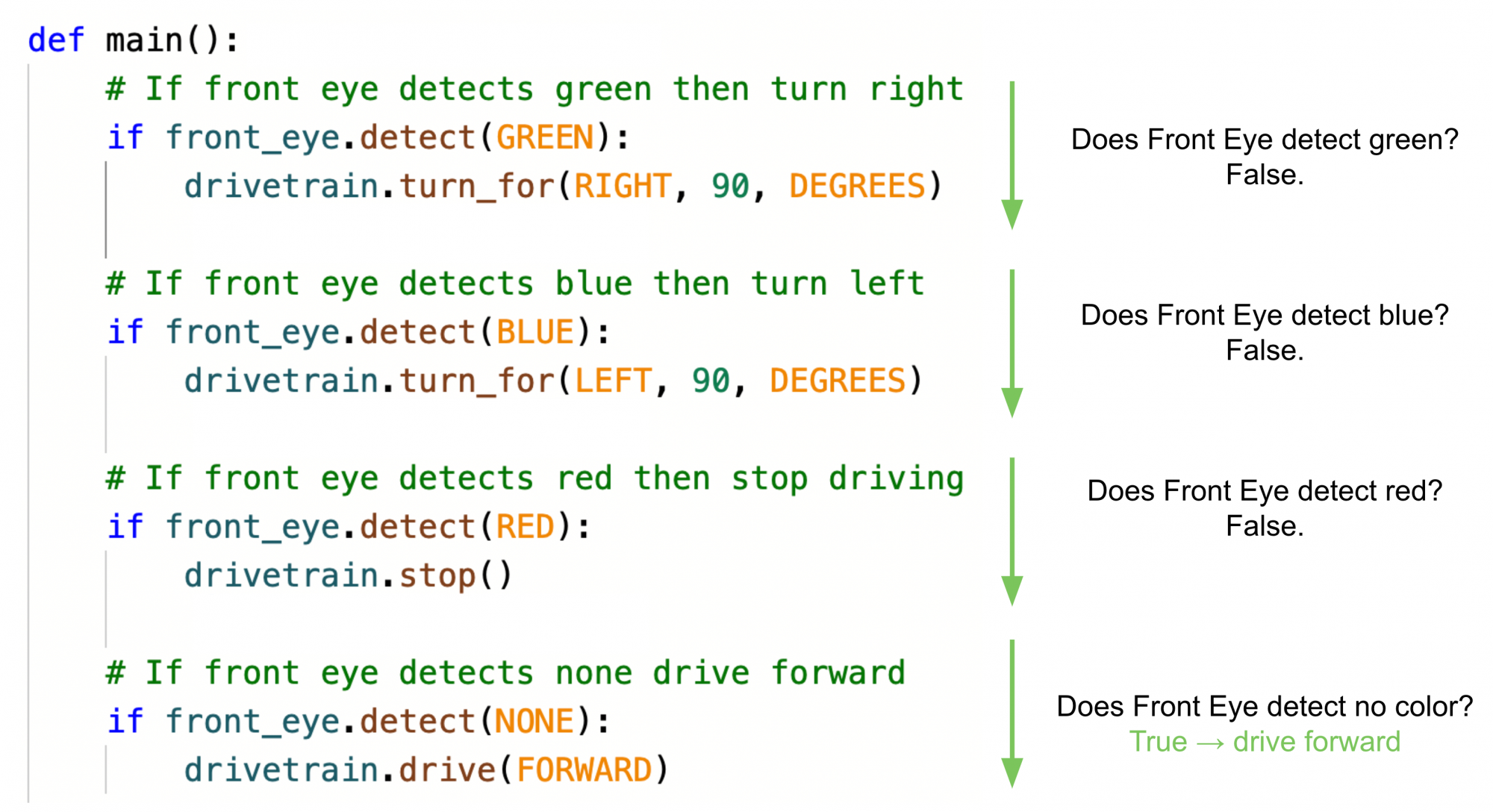
- El sensor Front Eye no detecta ningún color al comienzo del proyecto, por lo tanto, la última declaración si devuelve Verdadero. El robot VR continuará avanzando ya que la última afirmación si se informó como Verdadero y todos los demás bloques se informaron como Falso al comienzo del proyecto.
- Tenga en cuenta que no hay ningún bucle en este proyecto que pueda pausar el flujo del proyecto para verificar repetidamente una condición. La declaración if verifica la condición una vez y luego continúa.
- Guarde el proyecto antes de pasar a la siguiente lección, para aprender a agregar condiciones de verificación repetidas con declaraciones si .
Preguntas
Seleccione un enlace a continuación para acceder al cuestionario de la lección.
Google Doc / .docx / .pdf