
পাঠ ৩: প্রকল্প-পরবর্তী সারাংশ
সবুজ ডিস্কে পৌঁছানোর পরও কেন ভিআর রোবটটি গাড়ি চালিয়ে গেল?
যখন এই প্রকল্পটি চালানো হয়, তখন ভিআর রোবটটি প্রথম সবুজ ডিস্কের সাথে সংঘর্ষের পরেও এগিয়ে যেতে থাকে, যেমনটি নীচের ভিডিওতে দেখানো হয়েছে।
ভিডিও ফাইল
এই প্রকল্পটি VR রোবটকে প্রকল্পের শুরুতে একবার যদি অন্য কোনও বিবৃতির শর্তাবলী পরীক্ষা করার নির্দেশ দেয়।
if স্টেটমেন্টটি whileলুপ থেকে আলাদা
- যদিওলুপের জন্য ভিআর রোবটকে কোনও সিদ্ধান্ত নিতে হয় না। যখন শর্তটি সত্য হয়, তখন whileলুপ, যারনয় শর্ত, লুপের বাইরে পরবর্তী কমান্ডটি কার্যকর করে। যখন শর্তটি False হয়, তখন while লুপটি নয় শর্তসহ শর্তটি True না হওয়া পর্যন্ত অপেক্ষা করতে থাকে এবং বাকি প্রকল্পটি চালানো বন্ধ করে দেয়।

- যদিবিবৃতি জন্য VR রোবটকে সিদ্ধান্ত নিতে হয়। যদি শর্তটি সত্য হয়, তাহলে if স্টেটমেন্টের ভিতরের কমান্ডগুলি কার্যকর করা হয়। যদি শর্তটি False হয়, তাহলে if স্টেটমেন্টের ভিতরের কমান্ডগুলি কার্যকর করা হবে না।
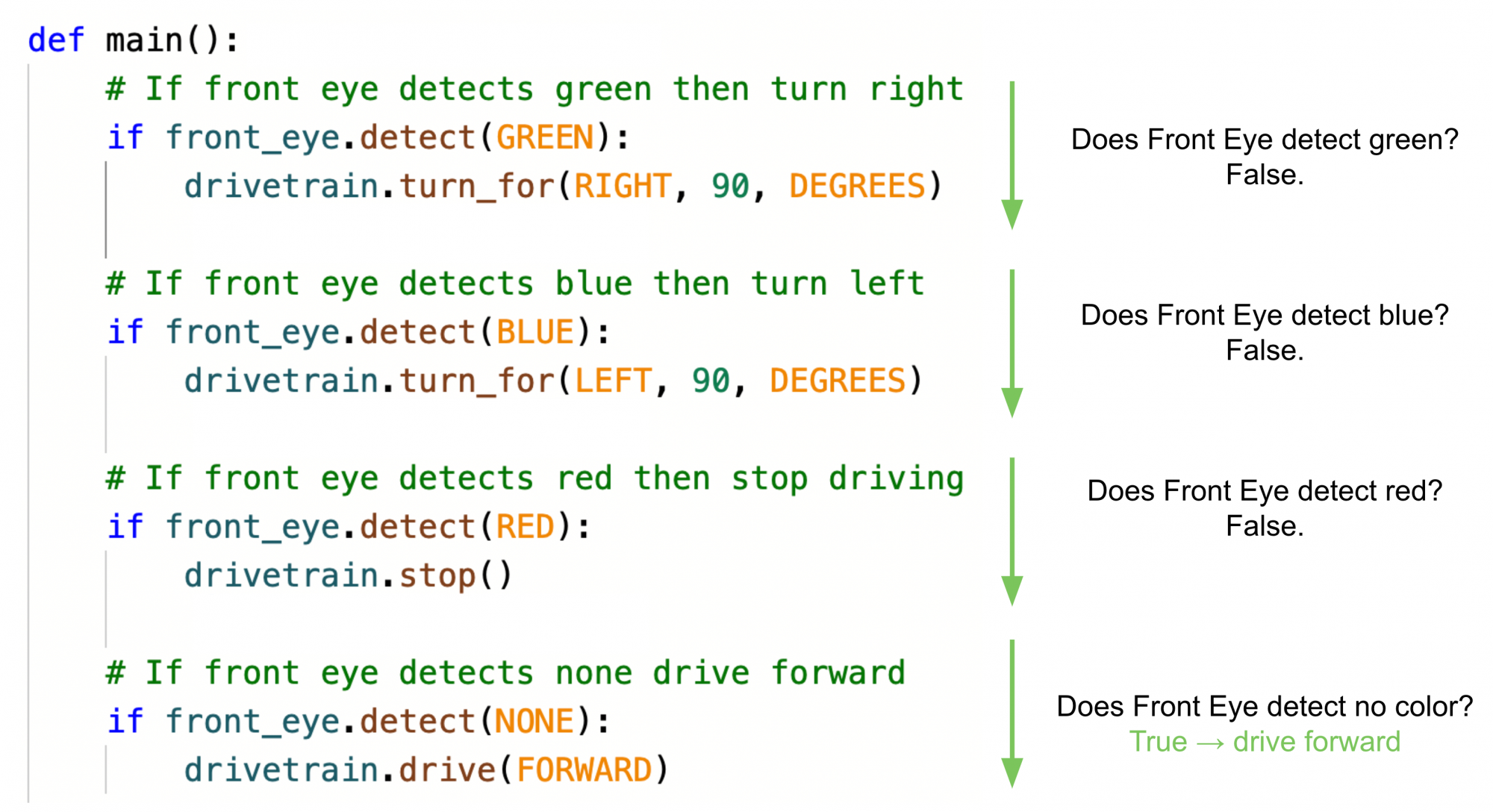
- প্রজেক্টের শুরুতে ফ্রন্ট আই সেন্সর কোন রঙ সনাক্ত করে না, তাই শেষ if স্টেটমেন্টটি True প্রদান করে। প্রকল্পের শুরুতে যদি বিবৃতি সত্য হিসাবে রিপোর্ট করা হয় এবং অন্যান্য সমস্ত ব্লক মিথ্যা হিসাবে রিপোর্ট করা হয়, তাহলে VR রোবটটি শেষ থেকে এগিয়ে যেতে থাকবে।
- লক্ষ্য করুন যে এই প্রকল্পে এমন কোনো লুপ নেই যা বারবার একটি শর্ত পরীক্ষা করতে প্রকল্পের প্রবাহকে থামাতে পারে। ifবিবৃতিটি একবার শর্তটি পরীক্ষা করে, তারপর এগিয়ে যায়।
- ifস্টেটমেন্ট সহ বারবার চেক করা শর্ত যোগ করার পদ্ধতি শিখতে পরবর্তী পাঠে যাওয়ার আগে প্রকল্পটি সংরক্ষণ করুন।