
पाठ 3: परियोजना-पश्चात सारांश
जब वी.आर. रोबोट हरे रंग की डिस्क पर पहुंचा तो उसने गाड़ी चलाना क्यों जारी रखा?
जब यह परियोजना चलती है, तो वीआर रोबोट पहली हरी डिस्क से टकराने पर भी आगे बढ़ना जारी रखता है, जैसा कि नीचे दिए गए वीडियो में दिखाया गया है।
वीडियो फाइल
यह परियोजना VR रोबोट को परियोजना के आरंभ में प्रत्येक if else कथन की शर्तों की जांच करने का निर्देश देती है।
if कथन whileलूप से भिन्न है
- जबकिलूपों के लिए वीआर रोबोट द्वारा निर्णय लेने की आवश्यकता नहीं होती है। जब शर्त सत्य होती है, तो whileलूप, जिसमेंnot शर्त होती है, लूप के बाहर अगला कमांड निष्पादित करता है। जब स्थिति गलत होती है, तो while लूप not स्थितिके साथ तब तक प्रतीक्षा करता रहता है जब तक कि स्थिति सही न हो जाए, और शेष परियोजना को चलने से रोक देता है।

- यदिकथनों के लिए वीआर रोबोट को निर्णय लेने की आवश्यकता है। यदि शर्त सत्य है, तो if कथन के अंदर के आदेश निष्पादित होते हैं। यदि शर्त गलत है, तो if कथन के अंदर के आदेश निष्पादित नहीं होते हैं
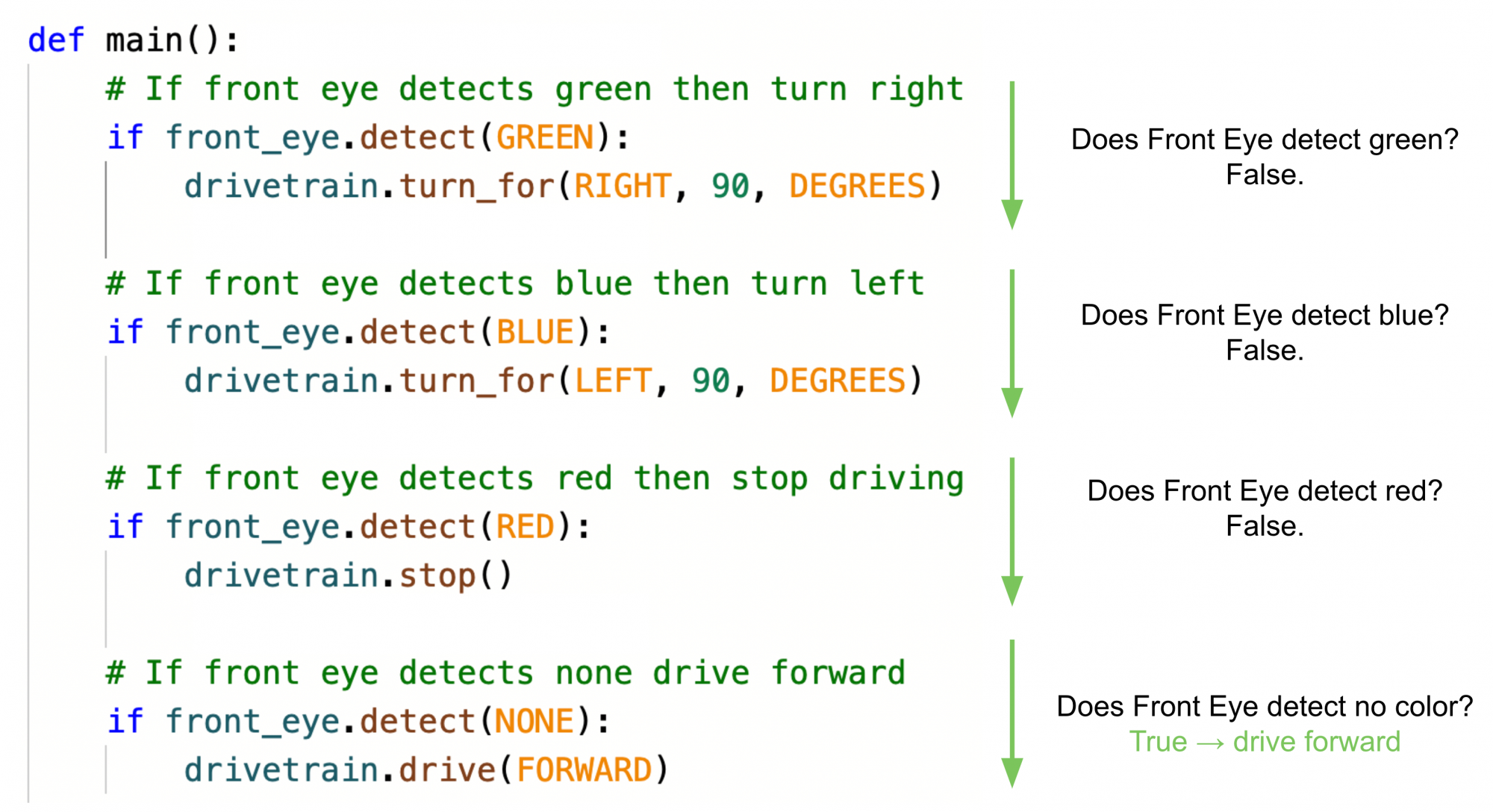
- फ्रंट आई सेंसर प्रोजेक्ट की शुरुआत में कोई रंग नहीं पहचानता है, इसलिए अंतिम if कथन True लौटाता है। यदि परियोजना के आरंभ में कथन सत्य बताया गया था और अन्य सभी ब्लॉक असत्य बताए गए थे, तो VR रोबोट अंतिम से आगे बढ़ना जारी रखेगा।
- ध्यान दें कि इस परियोजना में कोई भी लूप नहीं है जो किसी शर्त की बार-बार जांच करने के लिए परियोजना प्रवाह को रोक सके। ifकथन एक बार स्थिति की जांच करता है, फिर आगे बढ़ता है।
- अगले पाठ पर जाने से पहले प्रोजेक्ट को सेव कर लें, ताकि ifकथनों के साथ बार-बार जाँच की शर्तें जोड़ने के बारे में सीखा जा सके।