
수업 3: 프로젝트 후 요약
VR 로봇은 녹색 디스크에 도달했을 때 왜 계속 주행했을까요?
이 프로젝트를 실행하면 VR 로봇은 아래 영상에서 볼 수 있듯이 첫 번째 녹색 디스크와 충돌하더라도 계속해서 앞으로 나아갑니다.
비디오 파일
이 프로젝트에서는 VR 로봇에게 프로젝트 시작 시 각 if else 문의 조건을 한 번만 확인하도록 지시합니다.
if 문은 while루프와 다릅니다.
- 루프에서는 VR 로봇이 결정을 내릴 필요가 없습니다. 조건이 참이면not 조건을 갖는 while루프는 루프 외부의 다음 명령을 실행합니다. 조건이 False이면 not 조건을 사용하는 while 루프는 조건이 True가 될 때까지 계속 기다리고 나머지 프로젝트 실행을 중지합니다.

- 이 VR 로봇에게 결정을 내리도록 요구합니다. 조건이 참이면 if 문 내부의 명령이 실행됩니다. 조건이 False이면 if 문 내부의 명령은 실행되지 않습니다.
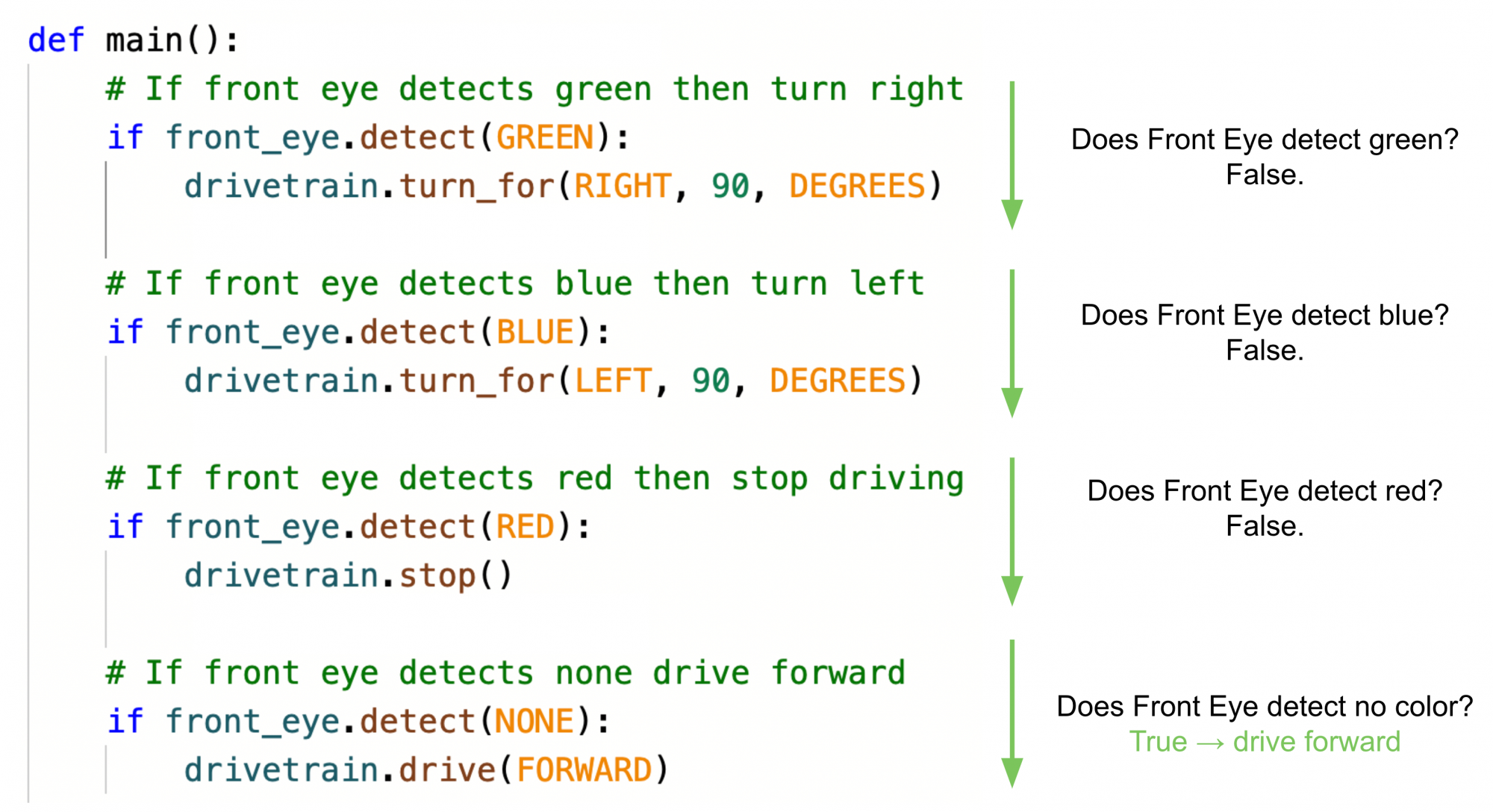
- Front Eye 센서는 프로젝트 시작 시 색상을 감지하지 못하므로 마지막 if 문은 True를 반환합니다. VR 로봇은 프로젝트 시작 시 마지막 if 문장이 True로 보고되고 다른 모든 블록이 False로 보고된 이후로 계속해서 구동됩니다.
- 이 프로젝트에는 조건을 반복적으로 확인하기 위해 프로젝트 흐름을 일시 중지할 수 있는 루프가 없다는 점에 유의하세요. if문은 조건을 한 번 확인한 후 계속 진행합니다.
- 다음 수업으로 넘어가기 전에 프로젝트를 저장하여 if명령문을 사용하여 반복적으로 조건을 확인하는 방법을 알아보세요.