
Lezione 3: Riepilogo post-progetto
Perché il robot VR ha continuato a guidare quando ha raggiunto il disco verde?
Quando questo progetto viene eseguito, il Robot VR continua ad avanzare anche in caso di collisione con il primo disco verde, come mostrato nel video qui sotto.
File video
Questo progetto incarica solo il robot VR di verificare le condizioni di ciascuna istruzione if else una volta all'inizio del progetto.
L'istruzione if è diversa dal ciclo while
- Mentre i loop non richiedono una decisione da parte del robot VR. Quando la condizione è vera, il ciclo while con una condizione not esegue il comando successivo all'esterno del ciclo. Quando la condizione è False, il ciclo while con una condizione not continua ad attendere finché la condizione non è True e interrompe l'esecuzione del resto del progetto.

- Se le dichiarazioni richiedono che il robot VR prenda una decisione. Se la condizione è True, vengono eseguiti i comandi all'interno dell'istruzione if. Se la condizione è False, i comandi all'interno dell'istruzione if non vengono eseguiti.
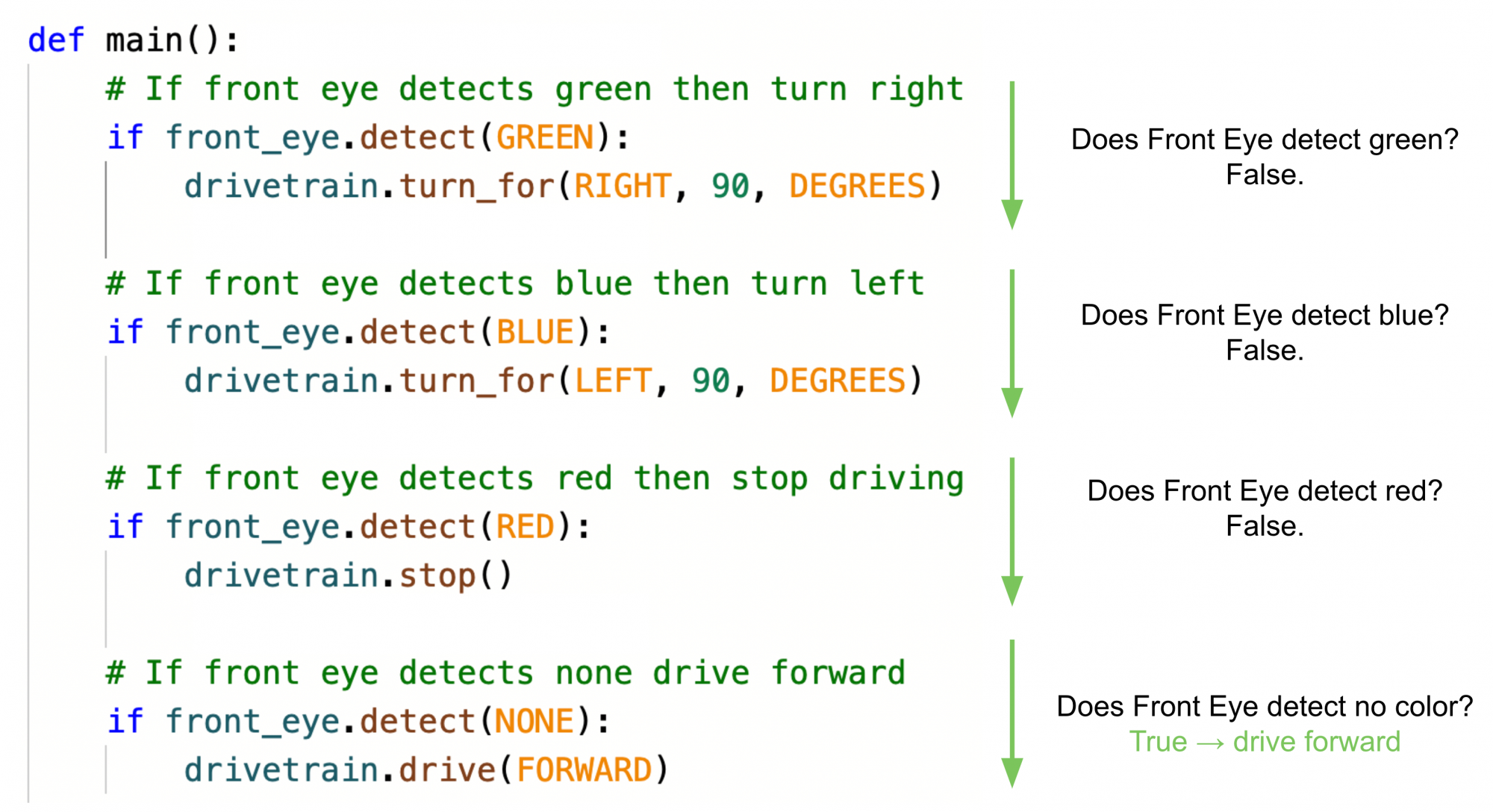
- Il sensore Front Eye non rileva alcun colore all'inizio del progetto, pertanto l'ultima istruzione if restituisce True. Il robot VR continuerà ad avanzare poiché l'ultima affermazione se è stata segnalata come Vero e tutti gli altri blocchi sono stati segnalati come Falso all'inizio del progetto.
- Si noti che non ci sono loop in questo progetto che possono mettere in pausa il flusso del progetto per controllare ripetutamente una condizione. L'istruzione if controlla la condizione una volta, quindi prosegue.
- Salvare il progetto prima di passare alla lezione successiva, per imparare ad aggiungere ripetutamente condizioni di controllo con le istruzioni if .