
Leçon 3 : Résumé post-projet
Pourquoi le robot VR a-t-il continué à conduire lorsqu'il a atteint le disque vert ?
Lorsque ce projet est exécuté, le robot VR continue à avancer même en cas de collision avec le premier disque vert, comme le montre la vidéo ci-dessous.
Fichier vidéo
Ce projet ne demande au robot VR de vérifier les conditions de chaque instruction if else qu'une seule fois au début du projet.
L' if est différente de la boucle while
- Alors que les boucles ne nécessitent pas de décision à prendre par le robot VR. Lorsque la condition est vraie, la boucle while avec une condition not exécute la commande suivante en dehors de la boucle. Lorsque la condition est fausse, la boucle while avec une condition not continue d'attendre que la condition soit vraie et arrête l'exécution du reste du projet.

- Si les déclarations nécessitent que le robot VR prenne une décision. Si la condition est True, alors les commandes à l'intérieur de l'instruction if sont exécutées. Si la condition est False, alors les commandes à l'intérieur de l'instruction if ne sont pas exécutées.
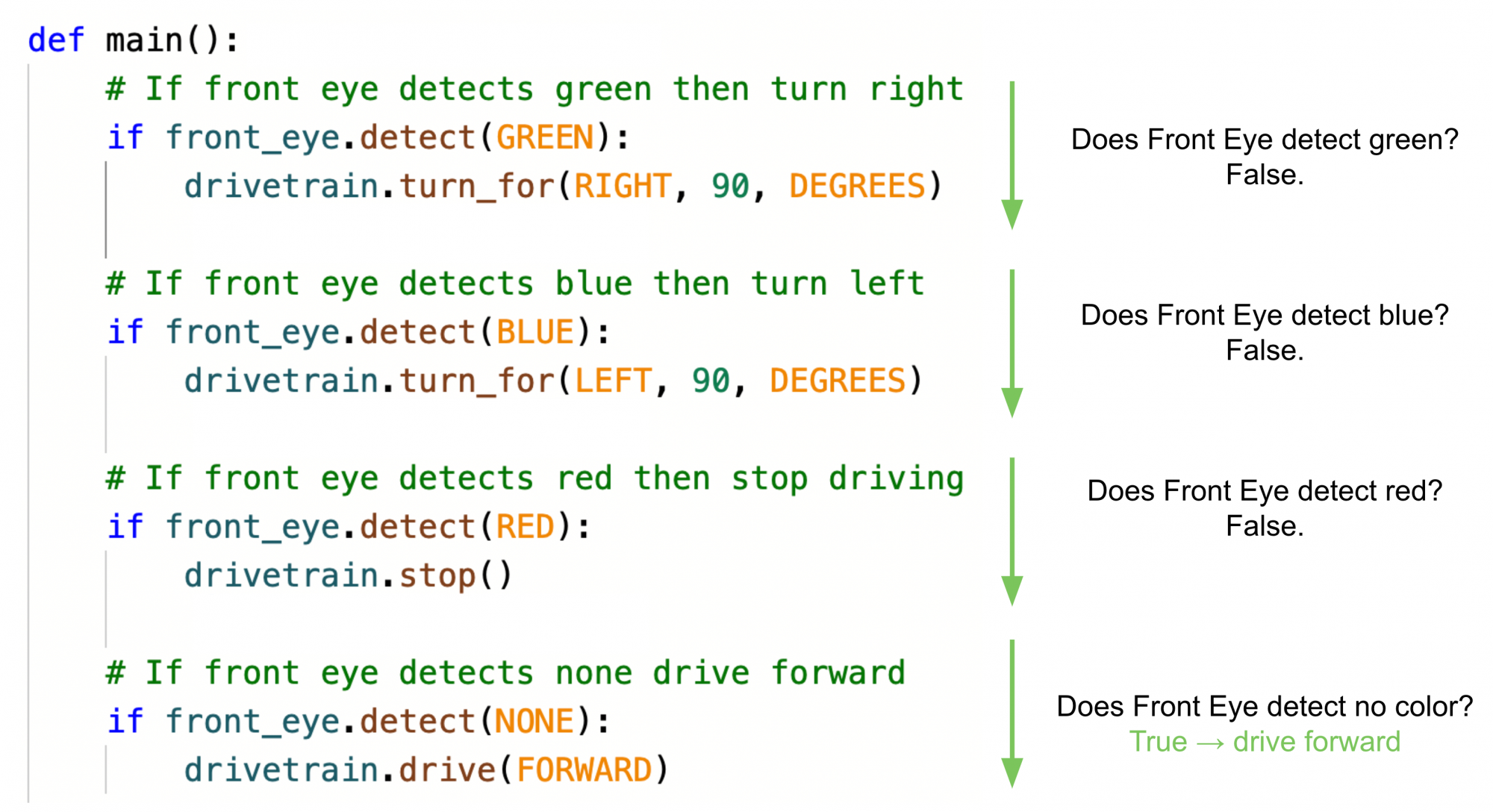
- Le capteur Front Eye ne détecte aucune couleur au début du projet, donc la dernière instruction si renvoie Vrai. Le robot VR continuera d'avancer depuis la dernière instruction si a été signalée comme Vrai et tous les autres blocs ont été signalés comme Faux au début du projet.
- Notez qu'il n'y a pas de boucles dans ce projet qui peuvent mettre en pause le flux du projet pour vérifier à plusieurs reprises une condition. L'instruction if vérifie la condition une fois, puis passe à autre chose.
- Enregistrez le projet avant de passer à la leçon suivante pour en savoir plus sur l'ajout répété de conditions de vérification avec des instructions if .
Questions
Veuillez sélectionner un lien ci-dessous pour accéder au questionnaire de la leçon.
Google Doc / .docx / .pdf