
Lección 3: Conducir hasta el número '31'
¡En esta lección, el robot VR conducirá hasta el número ‘31‘ y luego volverá al número ‘1‘ en el patio de recreo del mapa de cuadrícula numérica!
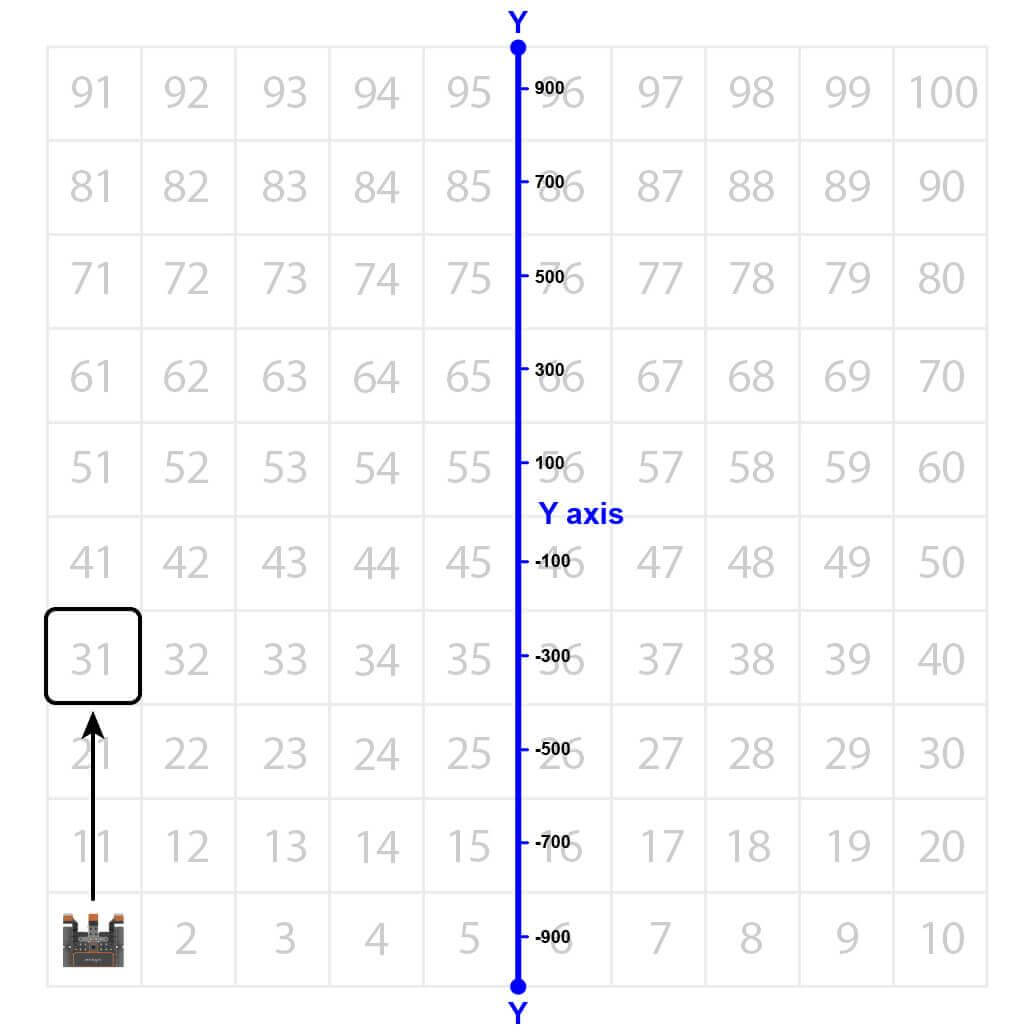
Tenga en cuenta que el robot VR viajará a lo largo del eje Y para moverse al número ‘31‘ en el patio de recreo del mapa de cuadrícula numérica.
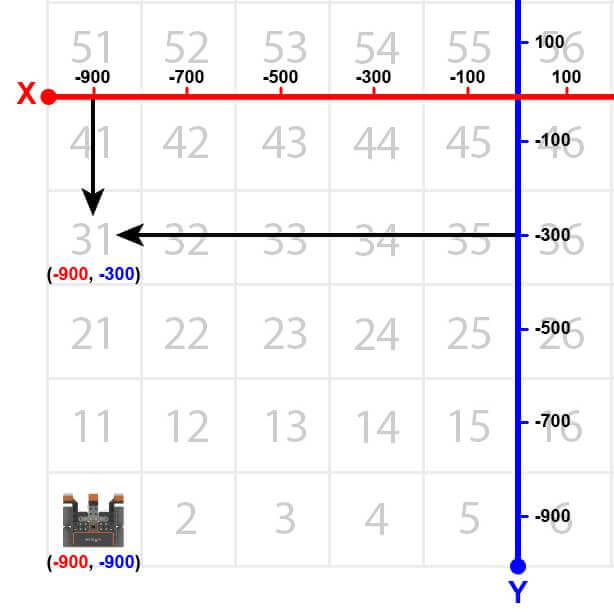
El robot VR conducirá hasta la ubicación del número ‘31‘ en el patio de recreo del mapa de cuadrícula numérica. Sin embargo, antes de que el Robot VR pueda navegar a ese número, se le debe decir al Robot VR dónde está la ubicación de ese número. Las coordenadas del número ‘31’ son (-900, -300).
- Arrastre o escriba un bucle while.
# Añadir código de proyecto en "main"
def main():
while condition:
wait(5, MSEC)- Establezca la condición para el bucle while en la posición del comando en el eje Y menor que -300 en milímetros (mm). Tu proyecto debería verse así:
# Añadir código de proyecto en "main"
def main():
while location.position(Y, MM) < -300:
wait(5, MSEC)- Arrastre o escriba el comando sin espera drive dentro del bucle while. Tu proyecto debería verse así:
# Añadir código de proyecto en "main"
def main():
whilelocation.position (Y, MM) < -300:
drivetrain.drive(FORWARD)
wait(5, MSEC)-
Tenga en cuenta que se utiliza el operador menor que en lugar del operador mayor que porque el robot VR está subiendo desde la parte inferior del patio de recreo. El robot VR comienza con un valor Y de -900 milímetros (mm). A medida que el robot VR avanza, los valores Y aumentan.
- Arrastre o escriba el comando stop fuera del bucle while. Tu proyecto debería verse así:
# Añadir código de proyecto en "main"
def main():
whilelocation.position (Y, MM) < -300:
drivetrain.drive(FORWARD)
wait(5, MSEC)
drivetrain.stop()- Abra la ventana del patio de recreo si aún no está abierta. Asegúrese de que se abra el mapa de cuadrícula de números Playground y ejecute el proyecto.
-
Mira la unidad VR Robot al número ‘31‘ en el patio de recreo del mapa de cuadrícula numérica.

- En este proyecto, el robot VR conduce al número ‘31‘ en el patio de recreo del mapa de cuadrícula numérica. Dado que los valores Y están aumentando a medida que el robot VR llega al número ‘31’, el proyecto utiliza un operador menor que.
- El robot VR avanzará mientras el valor Y sea menor que la coordenada en la que está el número indicado y se detendrá una vez que su valor Y sea mayor que el valor Y de la coordenada. Dado que el valor Y del número ‘31’ es -300, el robot VR dejará de funcionar una vez que el valor Y sea mayor que -300.
Seleccione el botón Siguiente para continuar con el resto de esta lección.