
Práctica
En la última sección, aprendiste cómo funciona el sensor óptico y cómo puedes usar los datos de este sensor en tu código para que tu robot tome decisiones. Ahora, vas a aplicar lo que has aprendido para codificar tu Simple Clawbot con un sensor óptico para completar la actividad Eye Spy Treasure.
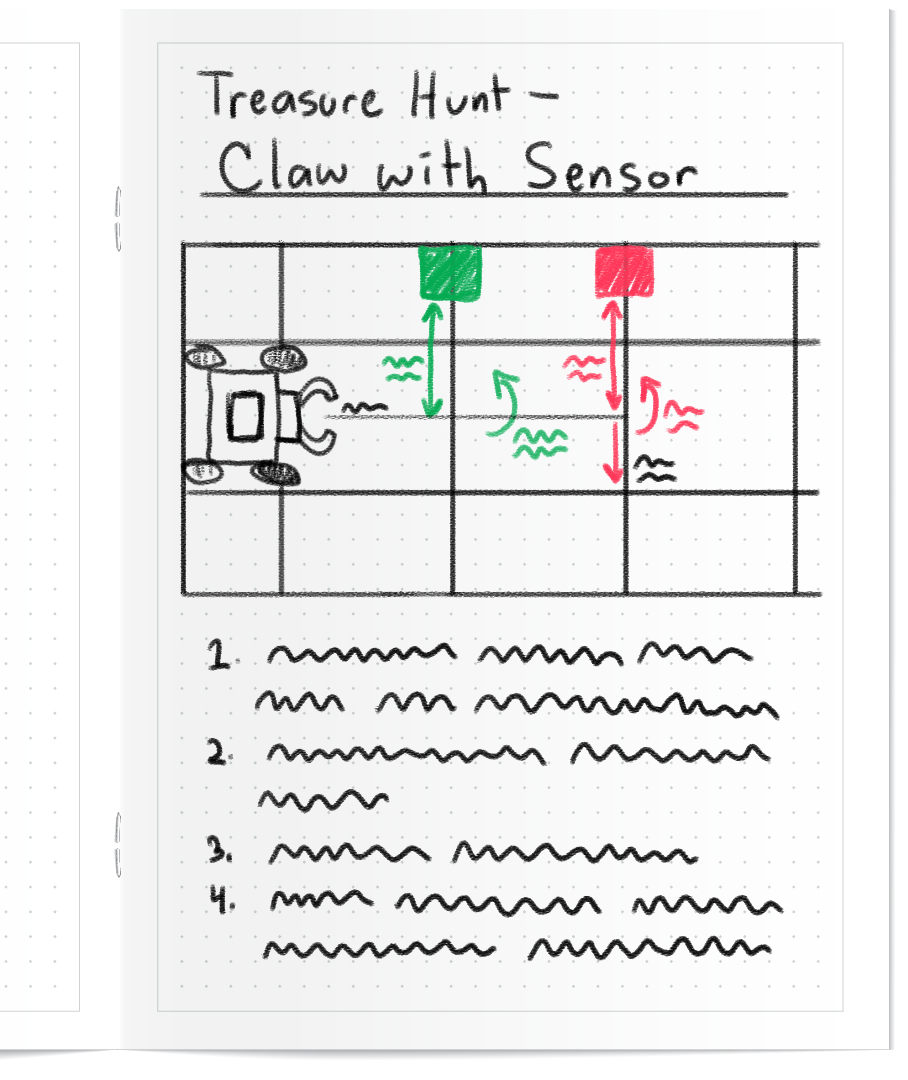
En esta actividad, tu robot conducirá a dos cubos IQ diferentes y utilizará el sensor óptico para detectar el color de cada cubo. Si el cubo es rojo, el robot debe recogerlo con la garra y moverlo a la zona de inicio.
Mire el video a continuación para ver cómo puede aplicar lo que ha aprendido para completar la actividad de práctica Eye Spy Treasure.
¡Ahora es tu turno de completar la actividad de práctica del Tesoro del espía ocular!
En esta animación, el robot se mueve de forma autónoma para comprobar cada cubo con el sensor óptico, pero solo recoge el cubo rojo para recogerlo en la zona de inicio. Mira esta animación para ver un posible camino que tu robot podría tomar para completar la actividad de práctica Eye Spy Treasure.
Sigue los pasos de este documento para completar esta actividad.
A medida que complete la actividad de práctica Eye Spy Treasure, documente sus hallazgos en su cuaderno de ingeniería.
- Piensa en las distancias que tendrá que recorrer el robot para llegar a cada uno de los cubos.
- Piensa en lo que tendrá que hacer el robot cuando detecte un cubo rojo.
Vea esta imagen para ver un ejemplo de cómo puede registrar sus resultados.
Prepárate para la actividad del desafío
En Competir (en la página siguiente), codificarás tu robot para que verifique los cubos de forma autónoma y recoja solo el cubo rojo en la zona de inicio. Aprende a competir en el desafío del motor del tesoro, comprueba tu comprensión y luego practica para el desafío.
El objetivo de este desafío es que tu robot conduzca de forma autónoma para revisar los cubos en el campo y recoger el cubo rojo en la zona de inicio en el menor tiempo posible.
Mira esta animación para ver un ejemplo de cómo tu robot podría moverse en una ejecución exitosa del desafío.
Este es solo un posible camino que tu robot podría tomar para completar el Desafío del Movedor de Tesoros.
Sigue los pasos de este documento para obtener más información sobre cómo completar esta actividad. Google / .docx / .pdf
Compruebe su comprensión
Antes de comenzar el desafío, asegúrese de comprender las reglas y configúrelas respondiendo las preguntas del siguiente documento en su cuaderno de ingeniería.
Verifique sus preguntas de comprensión Google / .docx / .pdf
Después de completar las preguntas, practique para el desafío.
Selecciona Siguiente > para competir en el desafío Treasure Mover.