
實踐
在上一節 中,您了解了光學感測器的工作原理以及如何在程式碼中使用來自該感測器的資料來讓機器人做出決策。 現在,您將應用您所學到的知識來編寫帶有光學感測器的簡單爪機器人,以完成「眼睛間諜寶藏」活動。
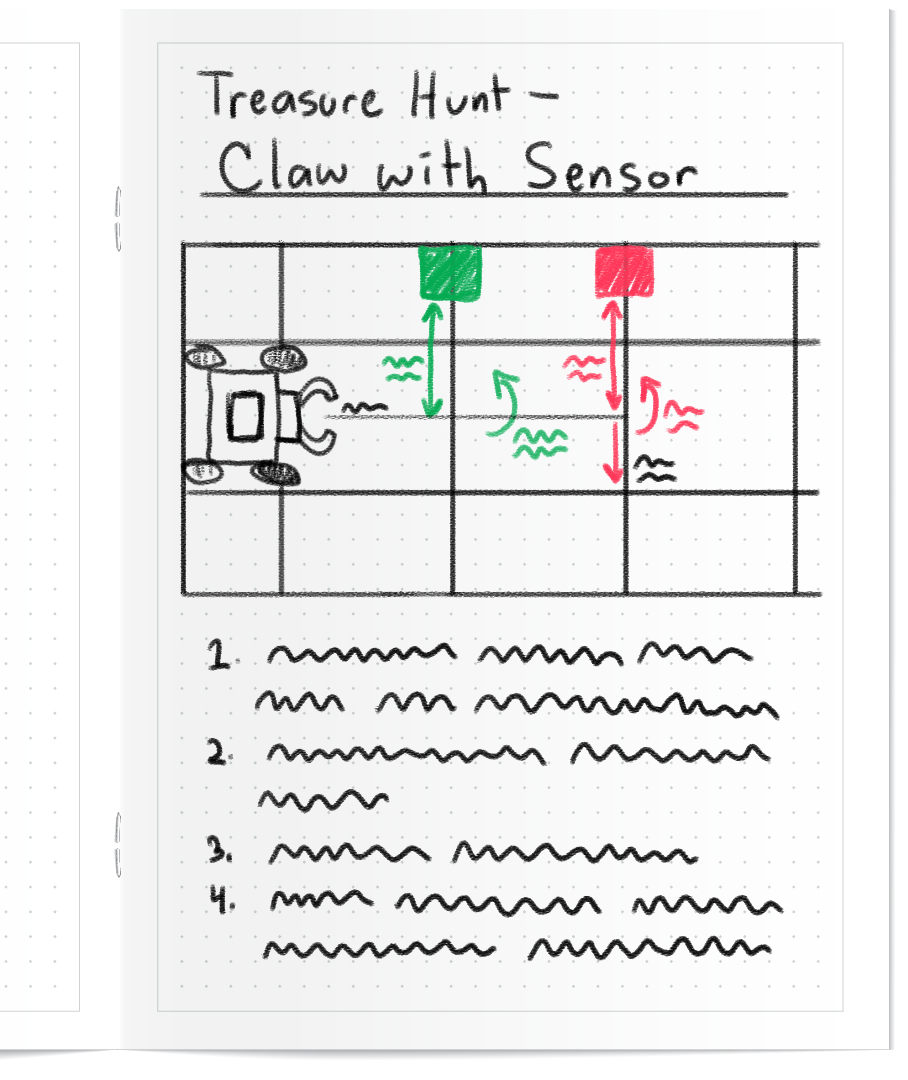
在此活動中,您的 機器人將駕駛到兩個不同的 IQ Cube,並使用光學感測器檢測每個立方體的顏色。 如果立方體是紅色的,您的機器人應該用爪子收集它並將其移動到主區域。
觀看下面的視頻,了解如何運用所學知識來完成“眼睛間諜寶藏”練習活動。
現在輪到你完成「眼睛間諜寶藏」練習活動了!
準備挑戰活動
在「競爭」(下一頁)中,您將對機器人進行編碼,使其自動檢查立方體並僅收集主區域中的紅色立方體。 了解如何參加寶藏搬運者挑戰賽,檢查您的理解情況,然後練習應對挑戰。