
实践
在上一节 中,您了解了光学传感器的工作原理以及如何在代码中使用来自该传感器的数据来让机器人做出决策。 现在,您将应用您所学到的知识来编写带有光学传感器的简单爪机器人,以完成“眼睛间谍宝藏”活动。
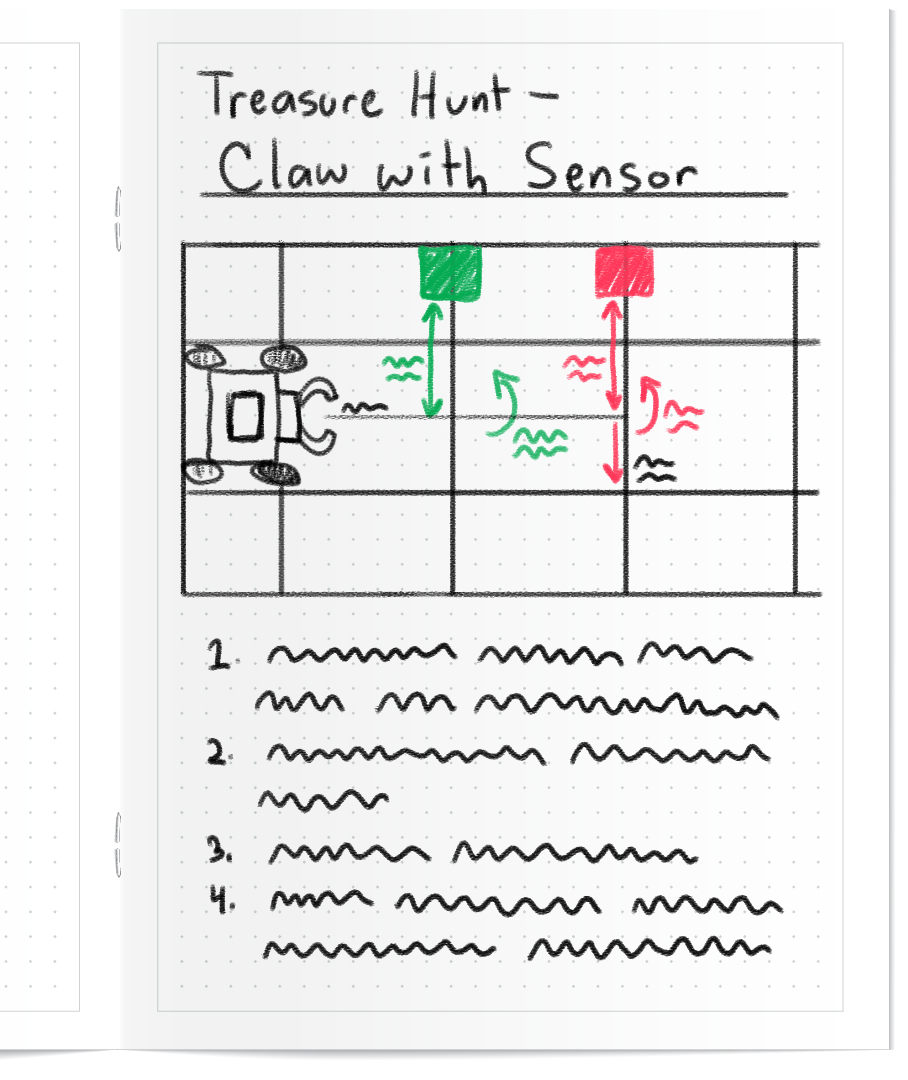
在此活动中,您的 机器人将驾驶到两个不同的 IQ Cube,并使用光学传感器检测每个立方体的颜色。 如果立方体是红色的,您的机器人应该用爪子收集它并将其移动到主区域。
观看下面的视频,了解如何运用所学知识来完成“眼睛间谍宝藏”练习活动。
现在轮到你完成“眼睛间谍宝藏”练习活动了!
准备挑战活动
在“竞争”(下一页)中,您将对机器人进行编码,使其自动检查立方体并仅收集主区域中的红色立方体。 了解如何参加宝藏搬运者挑战赛,检查您的理解情况,然后练习应对挑战。