
練習する
最後 セクションでは、光学センサーがどのように機能するか、またコード内でこのセンサーからのデータを使用してロボットに意思決定をさせる方法を学びました。 ここで、学んだことを応用して光学センサーを備えた Simple Clawbot をコーディングし、Eye Spy Treasure アクティビティを完了します。
このアクティビティでは、 が 2 つの異なる IQ キューブに移動し、光学センサーを使用して各キューブの色を検出します。 立方体が赤い場合、ロボットはそれを爪で集めてホームゾーンに移動する必要があります。
以下のビデオを見て、これまでに学んだことを適用して Eye Spy Treasure の実践アクティビティを完了する方法を確認してください。
次は、あなたが Eye Spy Treasure の練習アクティビティを完了する番です。
このアニメーションでは、ロボットは自律的に移動し、 チェック 各キューブを光学センサーで確認しますが、赤いキューブだけを拾ってホーム ゾーン 集めます。 このアニメーションを見て、ロボットが Eye Spy Treasure の練習アクティビティを完了するためにたどることのできる のパスの 1 つを確認してください。
Eye Spy Treasure の実践アクティビティを完了したら、結果をエンジニアリング ノートに文書化してください。
- ロボットが各立方体まで移動するために必要な移動距離を考えてください。
- ロボット が赤い立方体を検出したときに何をする必要があるかを考えてください。
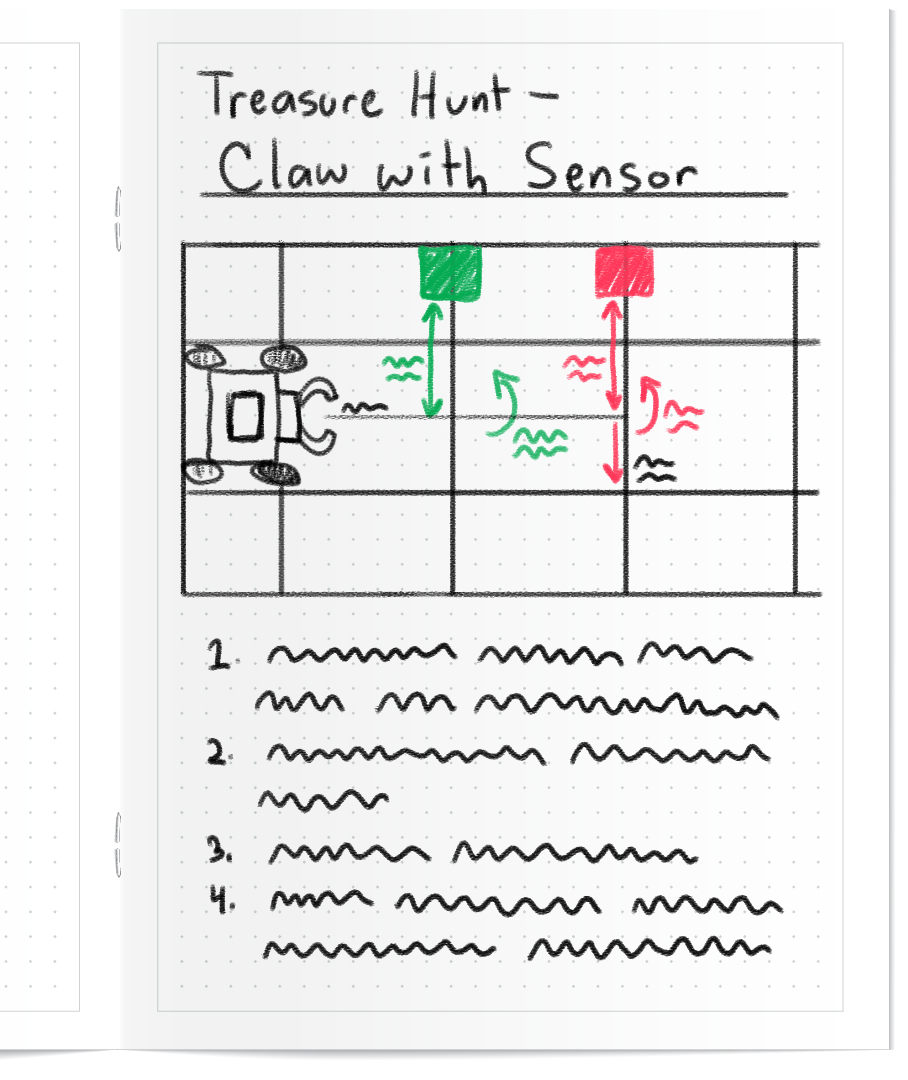
結果を記録する方法の例については、この画像を参照してください。
チャレンジアクティビティの準備をする
Compete (次のページ) では、自律的にキューブをチェックし、ホーム ゾーン内の赤いキューブのみを収集するようにロボットをコーディングします。 Treasure Mover Challenge に参加する方法を学び、理解度を確認してから、チャレンジに向けて練習してください。