
Práctica para el desafío de datos de visión - C++
![]() Caja de herramientas para maestros
: el propósito de esta actividad
Caja de herramientas para maestros
: el propósito de esta actividad
Esta actividad hace que los estudiantes apliquen lo que aprendieron en la página anterior para completar un conjunto de datos a partir de una instantánea de ejemplo. Completarán los valores que faltan, calcularán los valores de X e Y del centro e interpretarán lo que los datos pueden decirnos sobre la posición del objeto en relación con el punto central del robot. Esto los preparará para el éxito en el Desafío de Datos de Visión que sigue.

Añada los valores que faltan a continuación en su cuaderno de ingeniería.
Estos son los datos proporcionados de la instantánea:
- X = 50
- Y = 36
- W = 152
- H = 150

- ¿El REDBOX está a la izquierda o a la derecha del punto central del robot?
- ¿El REDBOX es más alto o más bajo que el punto central del robot?
![]() Consejos para profesores
Consejos para profesores
Llama la atención de los estudiantes sobre el hecho de que el marco de detección no cubre completamente el REDBOX. Está bien. Todavía reconoce el REDBOX. Es poco probable que el ajuste del sensor de visión perfeccione el marco de detección y eso está bien. El sensor de visión reconoce la mayoría de los REDBOX.
![]() Caja de herramientas para maestros
-
Respuestas
Caja de herramientas para maestros
-
Respuestas
Las respuestas de los estudiantes se pueden discutir en clase y/o puede revisar sus cuadernos de ingeniería para asegurarse de que completaron la actividad.
Solo hay un objeto (recuento de objetos = 1) en la instantánea y el ancho es proporcionado por el programa (ancho del objeto = 152). El valor de la X central es 152/2 + 50 = 126.
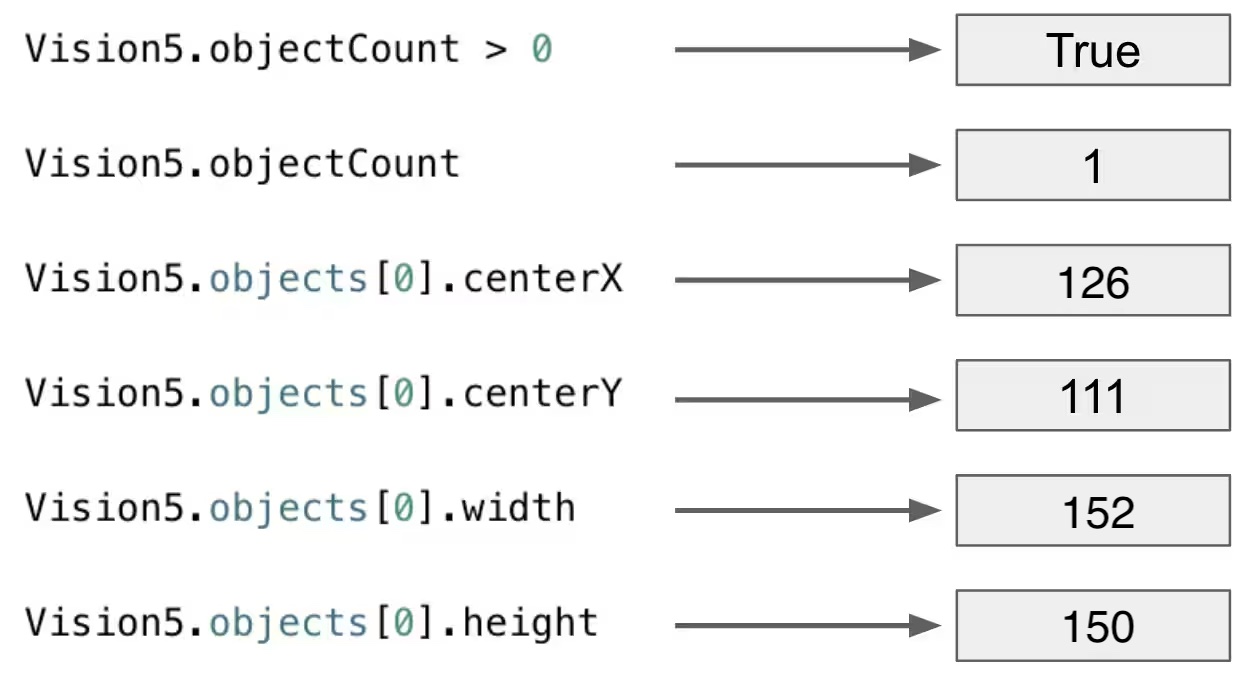
- El REDBOX está a la izquierda del punto central del robot (un poco a la izquierda del centro). El REDBOX está a 31,5 píxeles (centro 157,5 - 126) a la izquierda del punto central del robot.
- El REDBOX es más bajo que el punto central del robot (ligeramente más bajo que el centro). El REDBOX está a 5,5 píxeles (111 - centro 105,5) por debajo del punto central del robot.