
Entraînement pour le Défi des données de vision - C++
![]() Boîte à outils de l'enseignant
-
Le but de cette activité
Boîte à outils de l'enseignant
-
Le but de cette activité
Cette activité permet aux élèves d'appliquer ce qu'ils ont appris à la page précédente afin de compléter un ensemble de données à partir d'un exemple d'instantané. Ils rempliront les valeurs manquantes, calculeront les valeurs X et Y du centre et interpréteront ce que les données peuvent nous dire sur la position de l'objet par rapport au point central du robot. Cela les préparera à réussir le Défi Vision Data qui suit.

Ajoutez les valeurs manquantes ci-dessous dans votre cahier d'ingénierie.
Voici les données fournies à partir de l'instantané :
- X = 50
- Y = 36
- W = 152
- H = 150

- La REDBOX est-elle à gauche ou à droite du point central du robot ?
- La REDBOX est-elle plus haute ou plus basse que le point central du robot ?
![]() Conseils à l'enseignant
Conseils à l'enseignant
Attirez l'attention des élèves sur le fait que le cadre de détection ne couvre pas entièrement la REDBOX. Ce n'est pas grave. Il reconnaît toujours la REDBOX. Il est peu probable que le réglage du capteur de vision perfectionne le cadre de détection, et c'est normal. Le capteur de vision reconnaît la majorité de la REDBOX.
![]() Boîte à outils de l'enseignant
-
Réponses
Boîte à outils de l'enseignant
-
Réponses
Les réponses des élèves peuvent être discutées en classe et/ou vous pouvez consulter leurs cahiers d'ingénierie pour vous assurer qu'ils ont terminé l'activité.
Il n'y a qu'un seul objet (nombre d'objets = 1) dans l'instantané et la largeur est fournie par le programme (largeur d'objet = 152). La valeur du centre X est 152/2 + 50 = 126.
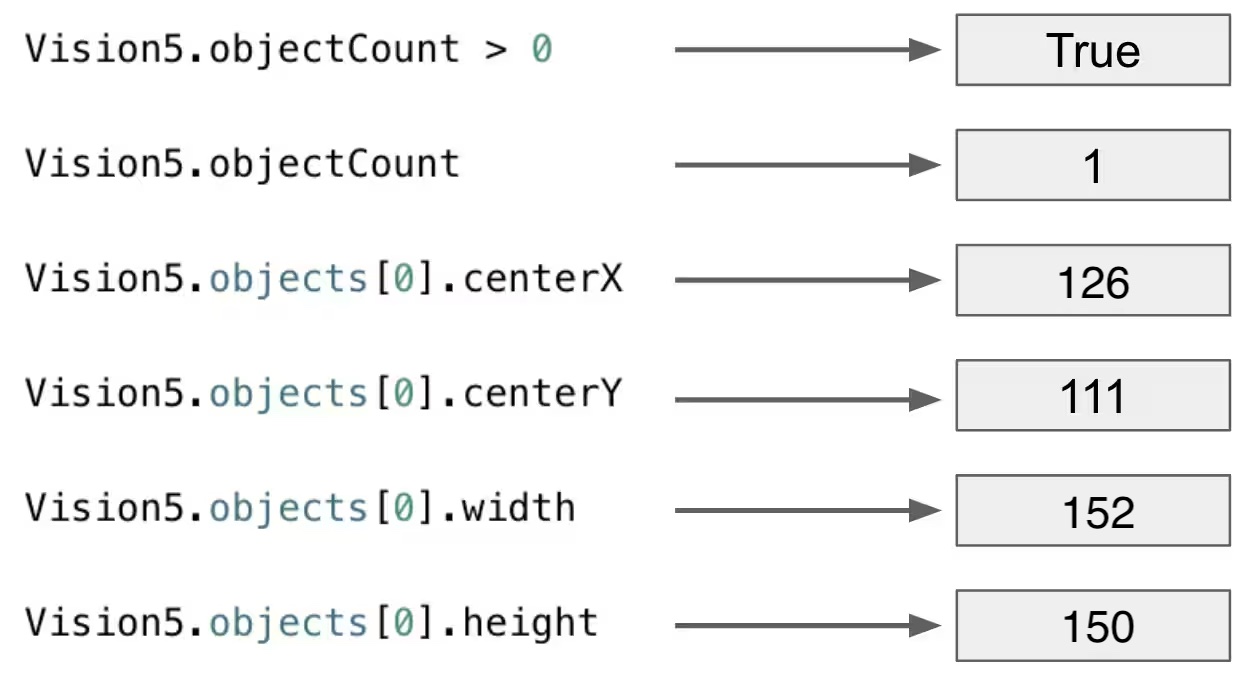
- La REDBOX se trouve à gauche du point central du robot (un peu à gauche du centre). La REDBOX est de 31,5 pixels (centre 157,5 - 126) à gauche du point central du robot.
- La REDBOX est plus basse que le point central du robot (légèrement plus bas que le centre). La REDBOX est de 5,5 pixels (111 - centre 105,5) en dessous du point central du robot.