
![]() Boîte à outils de l'enseignant
-
Plan d'activité
Boîte à outils de l'enseignant
-
Plan d'activité
- Cette exploration présentera aux étudiants la programmation de base du moteur du bras du Clawbot.
- Apprendre à programmer le moteur du bras permet aux élèves de contrôler correctement les mouvements du bras du V5 Clawbot. Pour plus d'informations sur les instructions utilisées dans un projet Python, consultez les informations d'aide pour VEXcode V5.
![]() Conseils pour les enseignants
-
Utilisation de la saisie semi-automatique
Conseils pour les enseignants
-
Utilisation de la saisie semi-automatique
La saisie semi-automatique est une fonctionnalité de VEXcode V5 qui prédit le reste de la commande que vous tapez. Pendant que les élèves travaillent dans VEXcode V5, encouragez-les à utiliser la fonction de saisie semi-automatique pour les aider avec la syntaxe Python. Vous remarquerez peut-être une fonction de saisie semi-automatique lorsque vous commencez à saisir l'instruction. Utilisez vos touches « Haut » et « Bas » pour sélectionner le nom souhaité, puis appuyez sur « Tab » ou (Entrée/Retour) sur votre clavier pour effectuer la sélection. Pour plus d'informations sur cette fonctionnalité, consultez l'article Python. 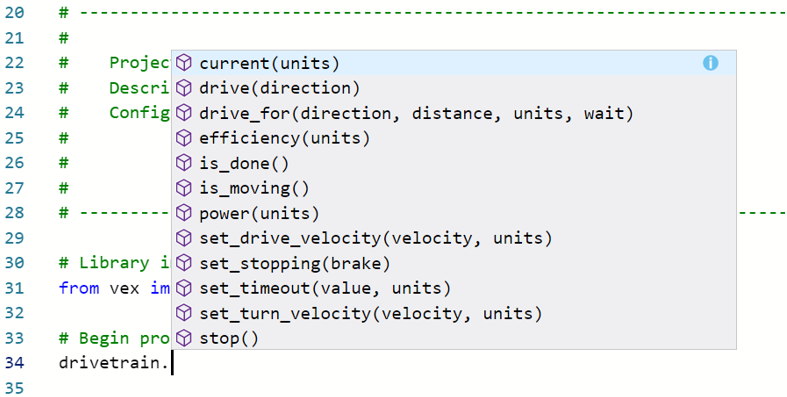
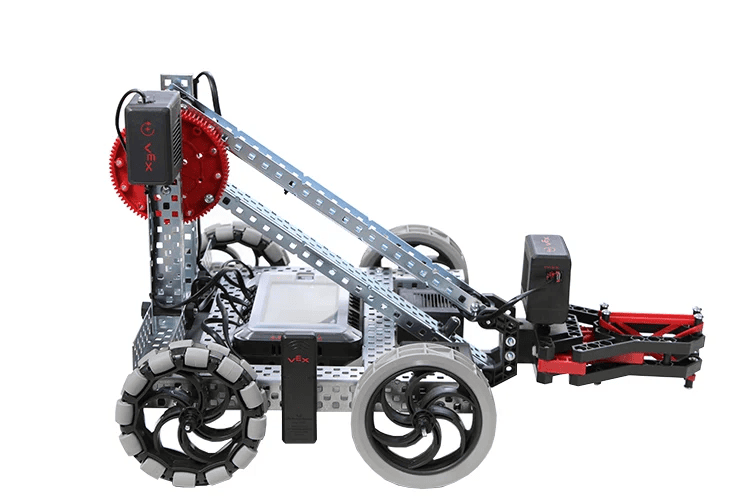
Le Clawbot V5 est prêt à atteindre !
Cette exploration vous donnera les outils pour pouvoir commencer à créer des projets sympas qui utilisent le bras du V5 Clawbot.
- Instructions Python VEXcode V5 qui seront utilisées dans cette exploration :
- arm_motor.spin_for(AVANT, 90, DEGRÉS)
- arm_motor.set_position(0, DEGRÉS)
- attendre(2, SECONDES)
-
Pour en savoir plus sur l'instruction, sélectionnez l'icône de point d'interrogation à côté d'une commande pour voir plus d'informations.

- Assurez-vous d'avoir le matériel requis, votre carnet d'ingénierie et VEXcode V5 téléchargé et prêt.
| Quantité | Matériel nécessaire |
|---|---|
| 1 |
Kit de démarrage pour salle de classe VEX V5 (avec micrologiciel à jour) |
| 1 |
Code VEX V5 |
| 1 |
Cahier d'ingénierie |
| 1 |
Exemple de projet de modèle Clawbot (transmission à 2 moteurs, sans gyroscope) |
Étape 1 : Préparation de l'exploration
Avant de commencer l’activité, avez-vous chacun de ces éléments prêts ? Vérifiez chacun des éléments suivants :
-
Les moteurs sont-ils branchés sur les bons ports ?
-
Les câbles intelligents sont-ils complètement insérés dans tous les moteurs ?
-
Le cerveau est-il allumé?
-
La batterie est-elle chargée?
![]() Conseils pour les enseignants
Conseils pour les enseignants
Modélisez chacune des étapes de dépannage pour les élèves.
Étape 2 : Démarrer un nouveau projet
Avant de commencer votre projet, sélectionnez le modèle de projet approprié. L'exemple de projet Clawbot Template (Drivetrain 2-motor, No Gyro) contient la configuration des moteurs du Clawbot. Si le modèle n'est pas utilisé, votre robot n'exécutera pas le projet correctement.

Procédez comme suit :
- Ouvrez le menu Fichier.
- Sélectionner Ouvrir Exemples.

- Sélectionnez et ouvrez l'exemple de projet Clawbot Template (Drivetrain 2-motor, No Gyro).
- Puisque nous allons programmer pour contrôler le bras, renommez votre projet ArmControl.
- Enregistrez votre projet.
- Vérifiez que le nom du projet ArmControl est maintenant dans la fenêtre au centre de la barre d’outils.

![]() Conseils pour les enseignants
Conseils pour les enseignants
- Puisqu’il s’agit d’une activité d’initiation à la programmation, l’enseignant doit modéliser les étapes, puis demander aux élèves d’effectuer les mêmes actions. L’enseignant doit ensuite surveiller les élèves pour s’assurer qu’ils suivent correctement les étapes.
- Assurez-vous que les élèves ont sélectionné Ouvrir les exemples dans le menu Fichier.
- Assurez-vous que les élèves ont sélectionné l'exemple de projet Clawbot Template (Drivetrain 2-motor, No Gyro).
Vous pouvez signaler aux élèves qu’il existe plusieurs sélections parmi lesquelles choisir sur la page Exemples. Au fur et à mesure qu’ils construisent et utilisent d’autres robots, ils auront la possibilité d’utiliser différents modèles.
- Vous pouvez demander aux élèves d’ajouter leurs initiales ou le nom de leur groupe au nom du projet. Cela aidera à différencier les projets si vous demandez aux étudiants de les soumettre.
![]() Boîte à outils de l'enseignant
-
Enregistrer des projets
Boîte à outils de l'enseignant
-
Enregistrer des projets
- Faites remarquer que lorsqu'ils ont ouvert VEXcode V5 pour la première fois, la fenêtre était intitulée Projet VEXcode. Le projet VEXcode est le nom de projet par défaut lors de la première ouverture de VEXcode V5. Une fois le projet renommé et enregistré, l’affichage a été mis à jour pour afficher le nouveau nom du projet. Grâce à cette fenêtre dans la barre d’outils, il est facile de vérifier que les étudiants utilisent le bon projet.
- Dites aux élèves qu’ils sont maintenant prêts à commencer leur premier projet. Expliquez aux élèves qu’en suivant quelques étapes simples, ils seront en mesure de créer et d’exécuter un projet qui permettra de lever et d’abaisser le bras du Clawbot.
- Rappelez aux élèves de sauvegarder leurs projets au fur et à mesure qu’ils travaillent. Les articles de la section Python de la bibliothèque VEX expliquent les pratiques de sauvegarde dans VEXcode V5.
![]() Boîte à outils de l'enseignant
-
Arrêtez-vous et discutez
Boîte à outils de l'enseignant
-
Arrêtez-vous et discutez
C'est le moment idéal pour faire une pause et demander aux groupes d'étudiants de revoir les étapes qui viennent d'être réalisées lors du démarrage d'un nouveau projet dans VEXcode V5.
Étape 3 : Déplacez le bras vers le haut
Nous allons maintenant commencer par programmer le bras pour qu'il se lève !
# Importation de bibliothèque
depuis vex import *
# Début du code du projet
arm_motor.set_position(0, DEGREES)- Écrivez la commande arm_motor.set_position() comme indiqué ci-dessus dans la zone de programmation pour définir la position de départ du bras.
arm_motor.set_position(0, DEGRÉS)
arm_motor.spin_for(AVANT, 90, DEGRÉS)- Ajoutez la commande arm_motor.spin_for() sous la commande arm_motor.set_position() comme indiqué ci-dessus pour déplacer le bras vers le haut.

- Sélectionnez l’icône Emplacement. Vous pouvez télécharger votre projet dans l’un des emplacements disponibles dans le Robot Brain. Sélectionnez l'emplacement 1.

- Connectez le robot à votre ordinateur ou tablette. L'icône Cerveau dans la barre d'outils devient verte une fois qu'une connexion a été établie avec succès.

- Cliquez sur le bouton Télécharger dans la barre d’outils pour télécharger le projet ArmControl sur le Robot Brain.
![]() Boîte à outils de l'enseignant
Boîte à outils de l'enseignant
Si les élèves utilisent un ordinateur, demandez-leur maintenant de déconnecter le câble USB du Robot Brain. Le fait que le robot soit connecté à un ordinateur pendant l'exécution d'un projet pourrait amener le robot à tirer sur le câble de connexion.

- Vérifiez que le projet ArmControl a été téléchargé dans le cerveau dans l'emplacement que vous avez choisi.
![]() Boîte à outils de l'enseignant
-
Modèle d'abord
Boîte à outils de l'enseignant
-
Modèle d'abord
Modèle exécutant le projet devant la classe avant de demander à tous les élèves d'essayer en même temps. Rassemblez les élèves dans une zone et laissez suffisamment d’espace pour que le Clawbot puisse bouger son bras. Montrez comment terminer le projet et faire revenir le bras du Clawbot à sa position de repos.
Dites aux élèves que c’est maintenant leur tour de réaliser leurs projets. Assurez-vous qu'ils disposent de suffisamment d'espace pour pouvoir lever le bras du Clawbot en toute sécurité.
- Exécutez le projet sur le Clawbot en vous assurant que le projet est sélectionné, puis appuyez sur le bouton Exécuter. Félicitations pour avoir créé votre premier projet Claw Arm !
Étape 4 : Essayez ceci : programmez le bras vers le bas
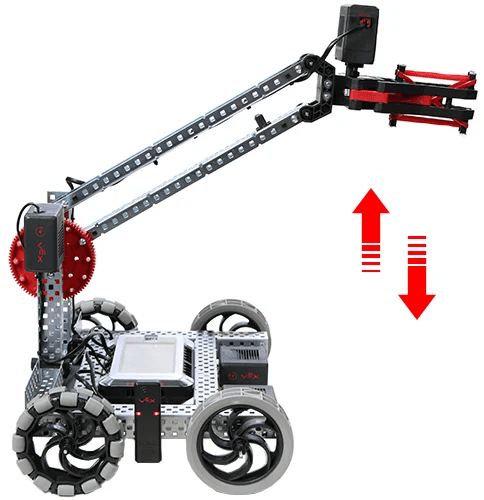
Maintenant que vous avez programmé le bras pour qu'il se déplace vers le haut, vous allez maintenant programmer le bras pour qu'il s'abaisse ou se déplace vers le bas.
![]()
- Ajoutez une deuxième commande arm_motor.spin_for() à votre projet ArmControl afin que le bras se lève à 90 degrés, attende 2 secondes, puis redescende.
- Astuce : Vous devrez changer la direction dans la commande.
- Notez que le bras maintient sa position pendant que la commande wait est en cours d'exécution. Le moteur tire l’énergie de la batterie pour maintenir le bras contre la force de gravité. C'est parce que le paramètre par défaut pour l'arrêt du moteur est le paramètre maintenir . Il existe deux autres réglages pour l'arrêt : frein et roue libre. Vous en apprendrez davantage sur ceux-ci dans un autre laboratoire.
![]() Boîte à outils pour enseignants
-
solution
Boîte à outils pour enseignants
-
solution
La solution au défi est ci-dessous. Pour abaisser le bras, les élèves ont dû modifier le paramètre « AVANT » en « ARRIÈRE » dans la commande arm_motor.spin_for() qui a été ajoutée.
# Début du code du projet
arm_motor.set_position(0, DEGREES)
arm_motor.spin_for(FORWARD, 90, DEGREES)
wait(2, SECONDS)
arm_motor.spin_for(REVERSE, 90, DEGREES)Étape 5 : Relevez le défi du contrôleur de la circulation aérienne
![]() Dans le défi du contrôleur de trafic aérien, le Clawbot doit déplacer son bras de haut en bas une fois sur 90 degrés, attendre 3 secondes, déplacer le bras de haut en bas deux fois sur 45 degrés, attendre 5 secondes, puis déplacer le bras de haut en bas trois fois sur 90 degrés.
Dans le défi du contrôleur de trafic aérien, le Clawbot doit déplacer son bras de haut en bas une fois sur 90 degrés, attendre 3 secondes, déplacer le bras de haut en bas deux fois sur 45 degrés, attendre 5 secondes, puis déplacer le bras de haut en bas trois fois sur 90 degrés.
Voici une liste des comportements du Clawbot :
- Déplacez le bras vers le haut puis vers le bas à 90 degrés.
- Attendez 3 secondes.
- Déplacez le bras vers le haut puis vers le bas sur 45 degrés.
- Déplacez le bras vers le haut puis vers le bas sur 45 degrés.
- Attendez 5 secondes.
- Déplacez le bras vers le haut puis vers le bas à 90 degrés.
- Déplacez le bras vers le haut puis vers le bas à 90 degrés.
- Déplacez le bras vers le haut puis vers le bas à 90 degrés.
![]() Boîte à outils pour enseignants
-
solution
Boîte à outils pour enseignants
-
solution
La plupart des commandes de ce défi sont arm_motor.spin_for(). Après avoir ajouté une commande pour déplacer le bras vers le haut et une autre pour déplacer le bras vers le bas, vous pouvez mettre en surbrillance les deux commandes, cliquer avec le bouton droit de la souris, puis choisir de les copier et de les coller autant de fois que nécessaire. Ensuite, les paramètres peuvent être modifiés pour répondre au défi et des commandes wait peuvent être ajoutées entre les deux.
- Consultez ici un exemple de solution au défi du contrôleur de trafic aérien :
# Début du code du projet
arm_motor.set_position(0, DEGREES)
arm_motor.spin_for(FORWARD, 90, DEGREES)
arm_motor.spin_for(REVERSE, 90, DEGREES)
wait(3, SECONDES)
arm_motor.spin_for(FORWARD, 45, DEGREES)
arm_motor.spin_for(REVERSE, 45, DEGREES)
arm_motor.spin_for(FORWARD, 45, DEGREES)
arm_motor.spin_for(REVERSE, 45, DEGREES)
wait(5, SECONDES)
arm_motor.spin_for(FORWARD, 90, DEGREES)
arm_motor.spin_for(REVERSE, 90, DEGREES)
arm_motor.spin_for(FORWARD, 90, DEGRÉS)
arm_motor.spin_for(MARCHE ARRIÈRE, 90, DEGRÉS)
arm_motor.spin_for(AVANT, 90, DEGRÉS)
arm_motor.spin_for(MARCHE ARRIÈRE, 90, DEGRÉS)Les étudiants plus avancés peuvent utiliser des boucles pour simplifier la solution.
# Début du code du projet
arm_motor.set_position(0, DEGREES)
arm_motor.spin_for(FORWARD, 90, DEGREES)
arm_motor.spin_for(REVERSE, 90, DEGREES)
wait(3, SECONDS)
pour repeat_count dans la plage(2):
arm_motor.spin_for(FORWARD, 45, DEGREES)
arm_motor.spin_for(REVERSE, 45, DEGREES)
wait(5, SECONDS)
pour repeat_count dans la plage(3):
arm_motor.spin_for(FORWARD, 90, DEGREES)
arm_motor.spin_for(REVERSE, 90, DEGREES)- Rubrique de programmation (Google Doc / .docx / .pdf)