
पाठ 5: डिस्क मूवर चुनौती
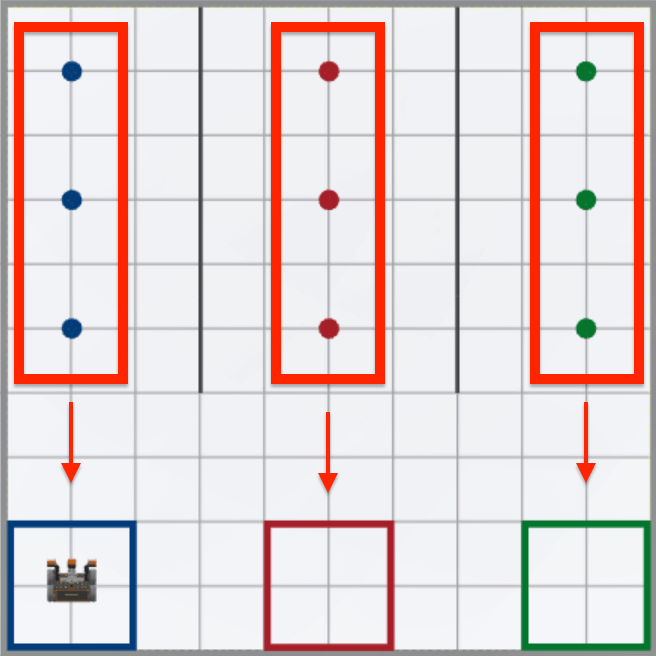
डिस्क मूवर चैलेंज में, वीआर रोबोट को प्रत्येक डिस्क को लेने के लिए इलेक्ट्रोमैग्नेट का उपयोग करना होगा और इसे डिस्क मूवर प्लेग्राउंडपर समान रंग के लक्ष्य तक ले जाना होगा। डिस्क मूवर चुनौती को हल करने के लिए आपको ड्राइवट्रेन, सेंसिंग और कंट्रोल श्रेणियों के कमांड के साथ-साथ नेस्टेड लूप्स और इलेक्ट्रोमैग्नेट का उपयोग करना होगा।
शिक्षण के परिणाम
- वीआर रोबोट को डिस्क मूवर चैलेंज को सफलतापूर्वक पूरा करने के लिए ड्राइवट्रेन, सेंसिंग और कंट्रोल श्रेणियों से सही क्रम में कमांड लागू करें।
सब कुछ एक साथ रखना
यह इकाई इस बात का पता लगाती है कि वीआर रोबोट पर इलेक्ट्रोमैग्नेट का उपयोग करके मूवर प्लेग्राउंडपर रंगीन डिस्क को कैसे उठाया और रखा जाए। यह इकाई पिछली इकाइयों में सीखे गए कौशलों को भी जोड़ती है, जैसे कि जबकिलूप के साथ आई सेंसर और डिस्टेंस सेंसर का उपयोग करना, डिस्क मूवर प्लेग्राउंड को नेविगेट करना और डिस्क उठाना।
इस इकाई की गतिविधियों में कई बार दोहराए जाने वाले आंदोलनों की आवश्यकता होती है। VEXcode VR परियोजनाओं में लूप्स और नेस्टेड लूप्स का उपयोग करने से उपयोगकर्ता को परियोजना प्रवाह को नियंत्रित करने और दोहराए गए आदेशों की लंबी सूची को कुछ ही में छोटा करने की अनुमति मिलती है। लूप्स का उपयोग बूलियन लौटाने वाले आदेशों के साथ भी किया जा सकता है, जिससे वीआर रोबोट को अपने वातावरण का मूल्यांकन करने और उस पर प्रतिक्रिया करने की अनुमति मिलती है, जैसे कि जब डाउन आई सेंसर किसी डिस्क का पता लगाता है तो इलेक्ट्रोमैग्नेट को रोकना और सक्रिय करना।
जब तक down_eye.near_object() नहीं है:
drivetrain.drive(FORWARD)
wait(5, MSEC)
drivetrain.stop()
magnet.energize(BOOST)एक लूप को दूसरे लूप के अन्दर रखने को 'नेस्टिंग' कहा जाता है। जब लूप नेस्ट किए जाते हैं, तो बाहरी लूप आंतरिक लूप के निष्पादन की संख्या को नियंत्रित करता है। नेस्टेड लूप उन परियोजनाओं में सहायक होते हैं जहां VR रोबोट एक ही व्यवहार को एक से अधिक बार दोहराता है। नेस्टिंग लूप्स किसी परियोजना को व्यवस्थित और संघनित करता है।
इस पाठ के शेष भाग को जारी रखने के लिए अगला बटन का चयन करें।