
Pelajaran 2: Alur Proyek dengan Perulangan For
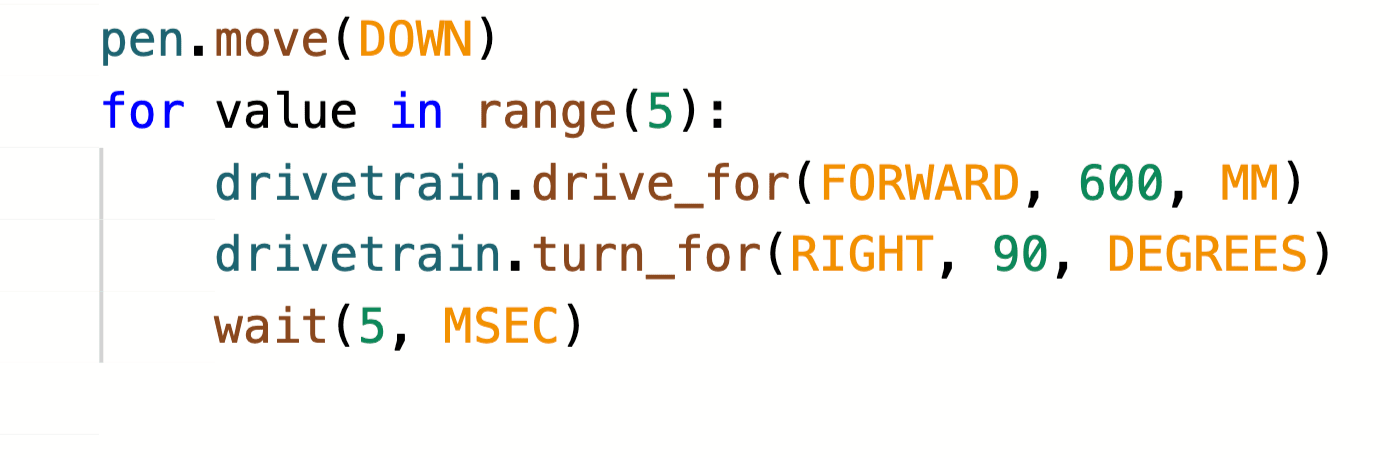
Ketika suatu proyek menggunakan perulangan untuk , ia tetap mengikuti logika yang sama saat mengeksekusi perintah. Misalnya, kedua contoh kode ini akan membuat Robot VR bergerak dengan cara yang sama. Namun, proyek dengan loopuntuk, mengulangi dua perintah Drivetrain empat kali untuk melakukannya.
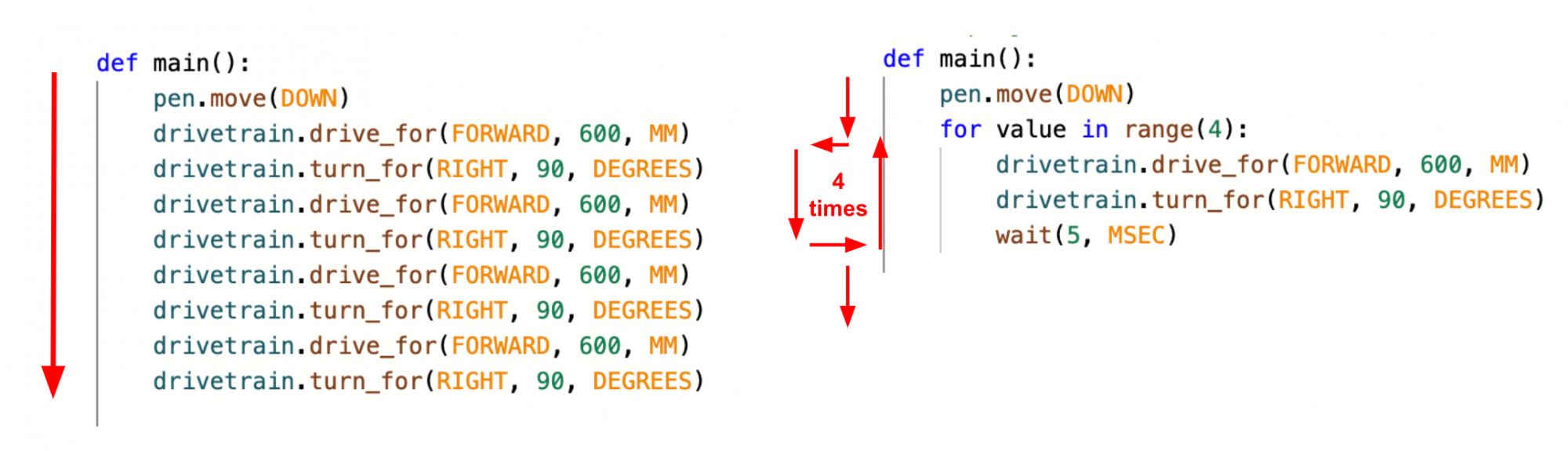
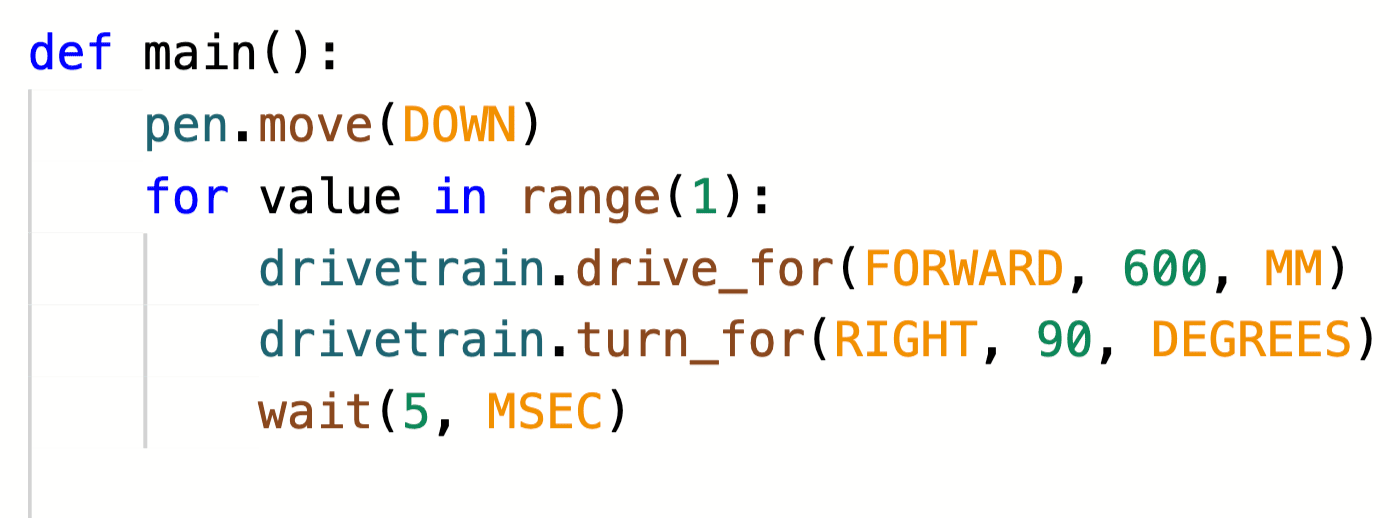
Perulangan untuk digunakan untuk mengulang serangkaian perintah sejumlah kali yang ditentukan. Perulangan untuk diulang (juga dikenal sebagai iterasi) atas rangkaian perintah di dalamnya. Dalam loop Python for , variabel 'value' digunakan untuk melacak iterasi saat ini, dan kata kunci 'in' menggunakan fungsi rangeuntuk menentukan jumlah iterasi. 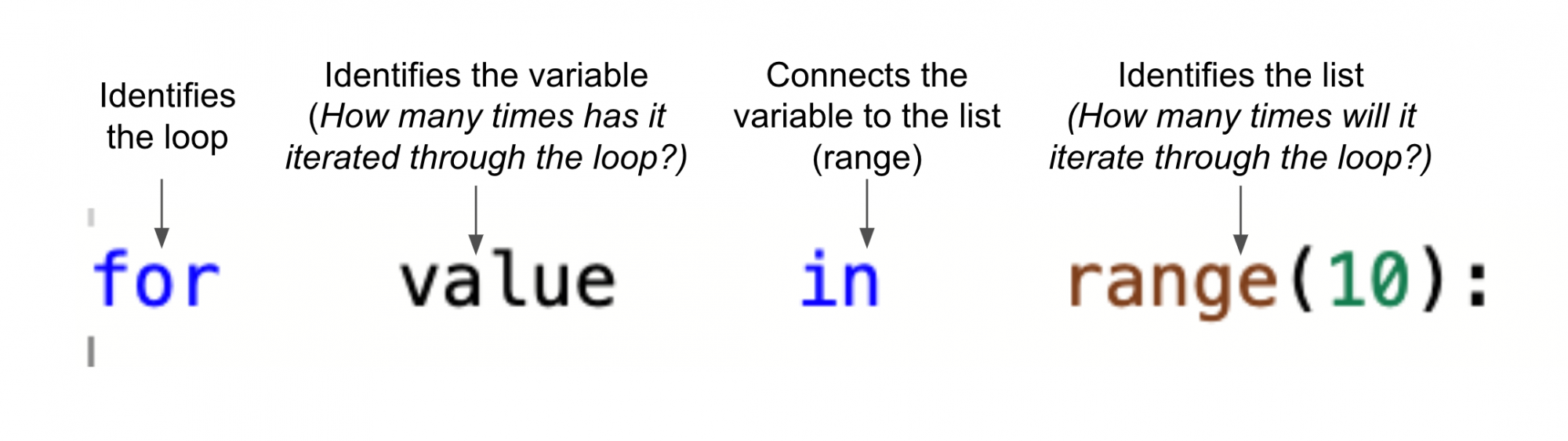
Fungsi rentang mengidentifikasi berapa kali perulangan harus diulang (atau diulang). Untuk mengulang perilaku sejumlah waktu yang diinginkan, tetapkan parameter fungsi rentang.
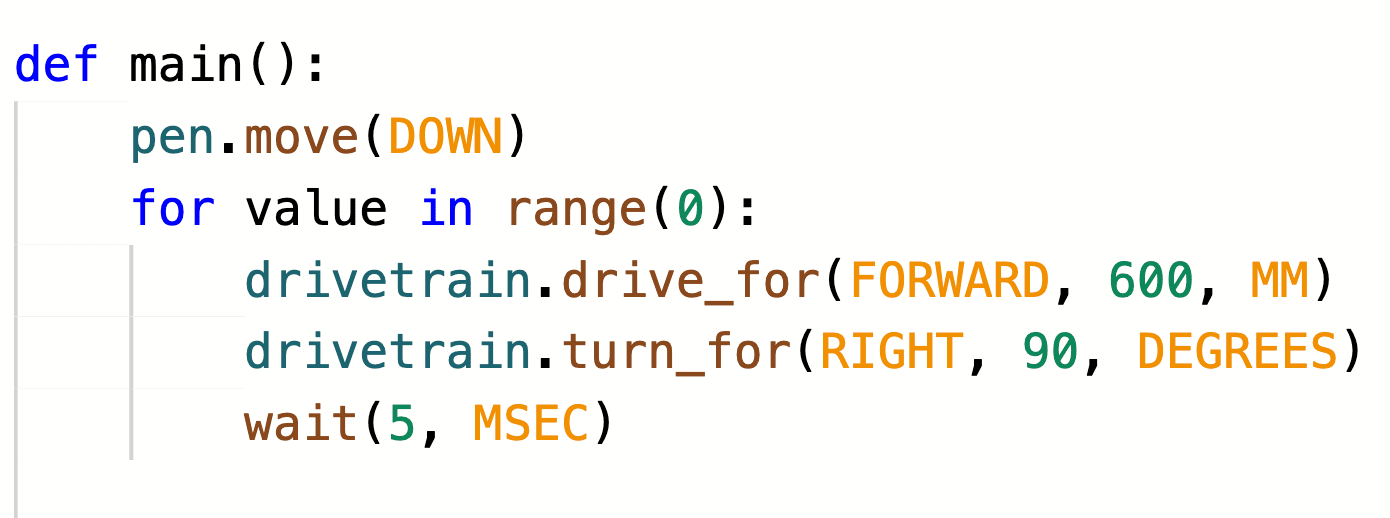
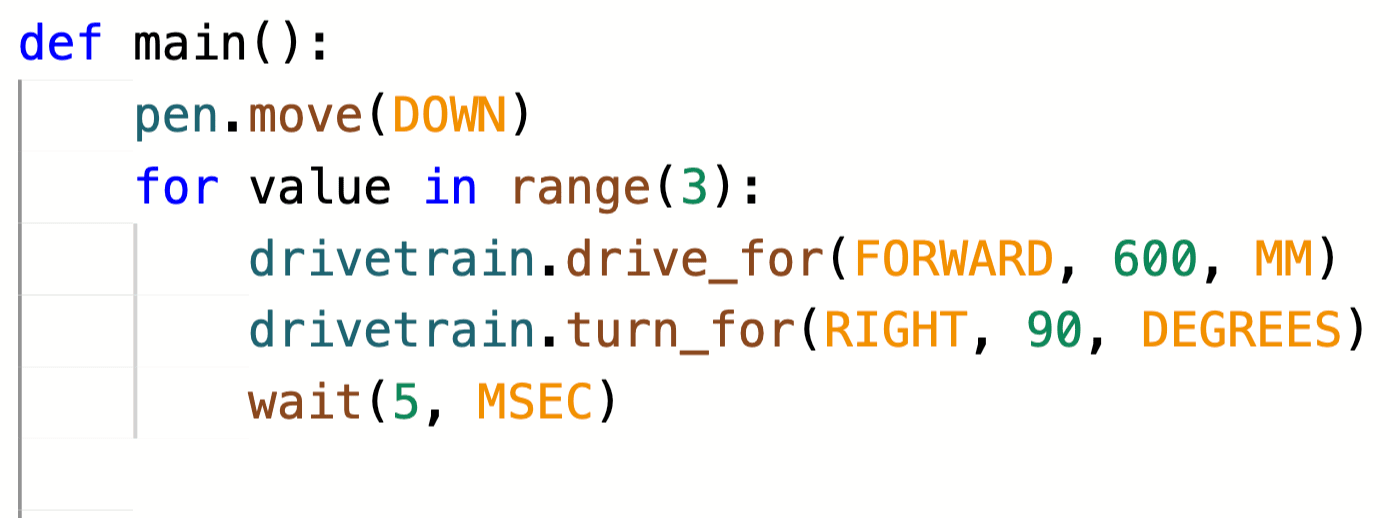
Fungsi rentang pada hakikatnya membuat daftar sementara yang menentukan apa yang harus dilalui oleh loop, agar dapat diselesaikan. Dalam kasus perilaku berulang, seperti menggambar empat sisi persegi, fungsi rentang menggunakan daftar sementara (0, 1, 2, 3) untuk memungkinkan Robot VR mengeksekusi perintah tersebut empat kali. Pergerakan Robot VR akan berubah tergantung pada parameter fungsi jangkauan, seperti yang ditunjukkan di sini.
 |
 |
Perintah drivetrain dieksekusi 0 kali. |
 |
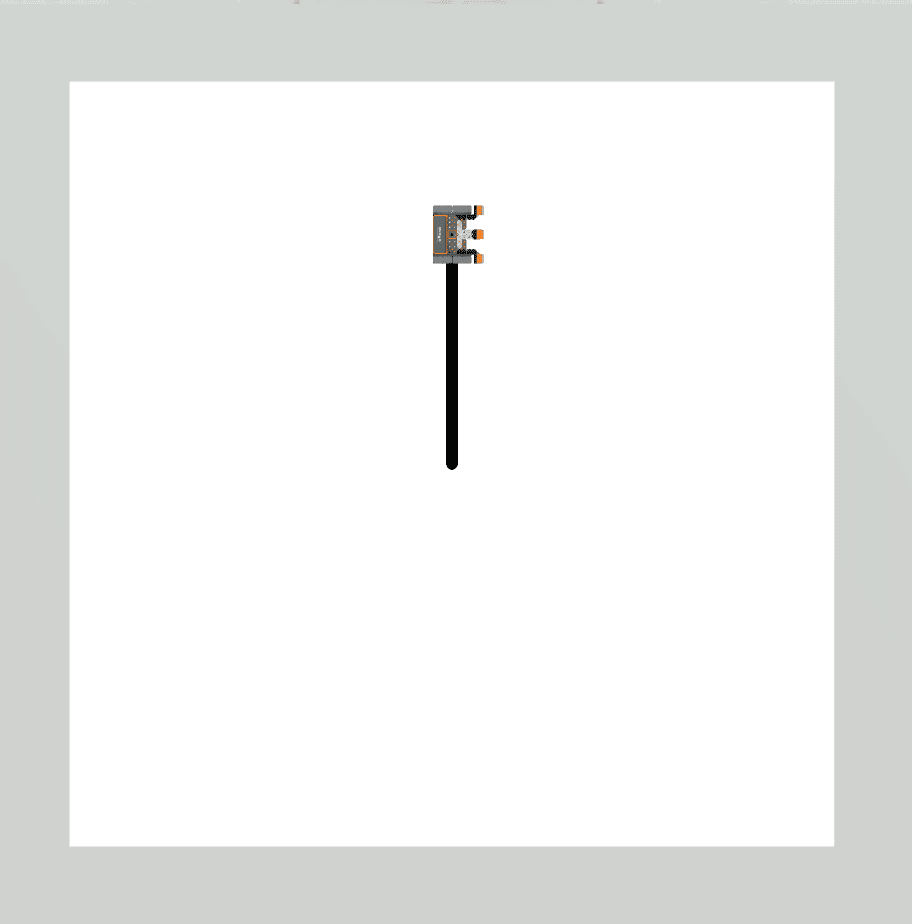 |
Perintah drivetrain dieksekusi 1 kali. |
 |
 |
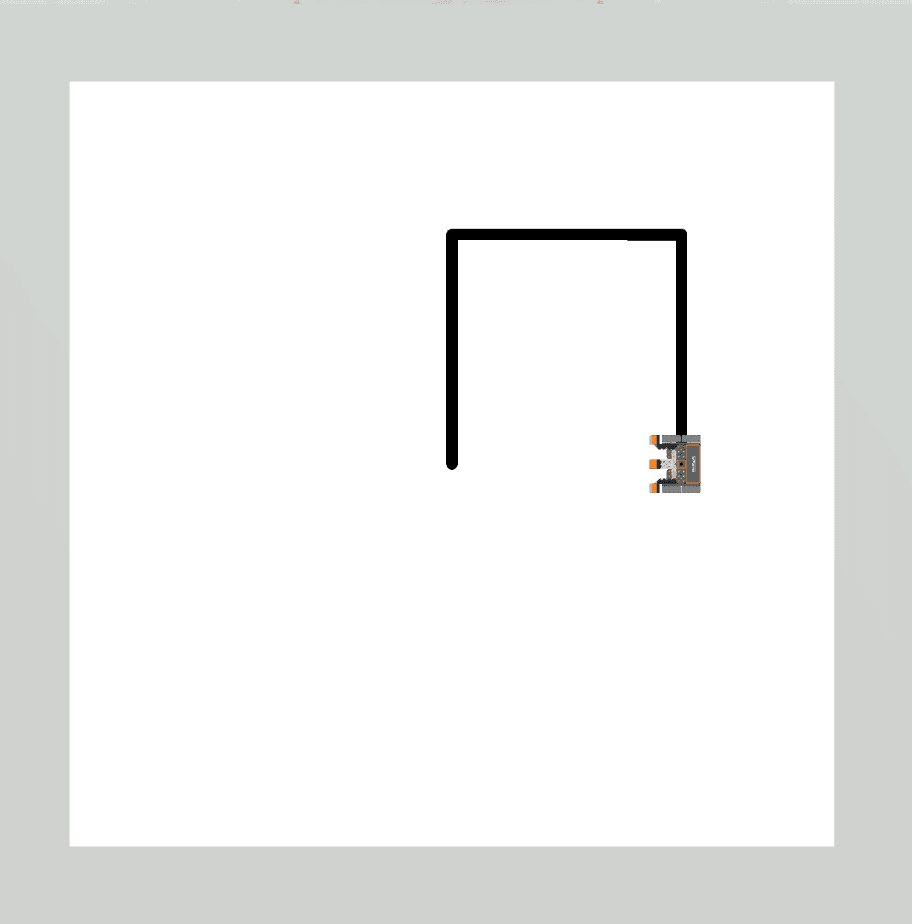
Perintah drivetrain dieksekusi 2 kali. |
 |
 |
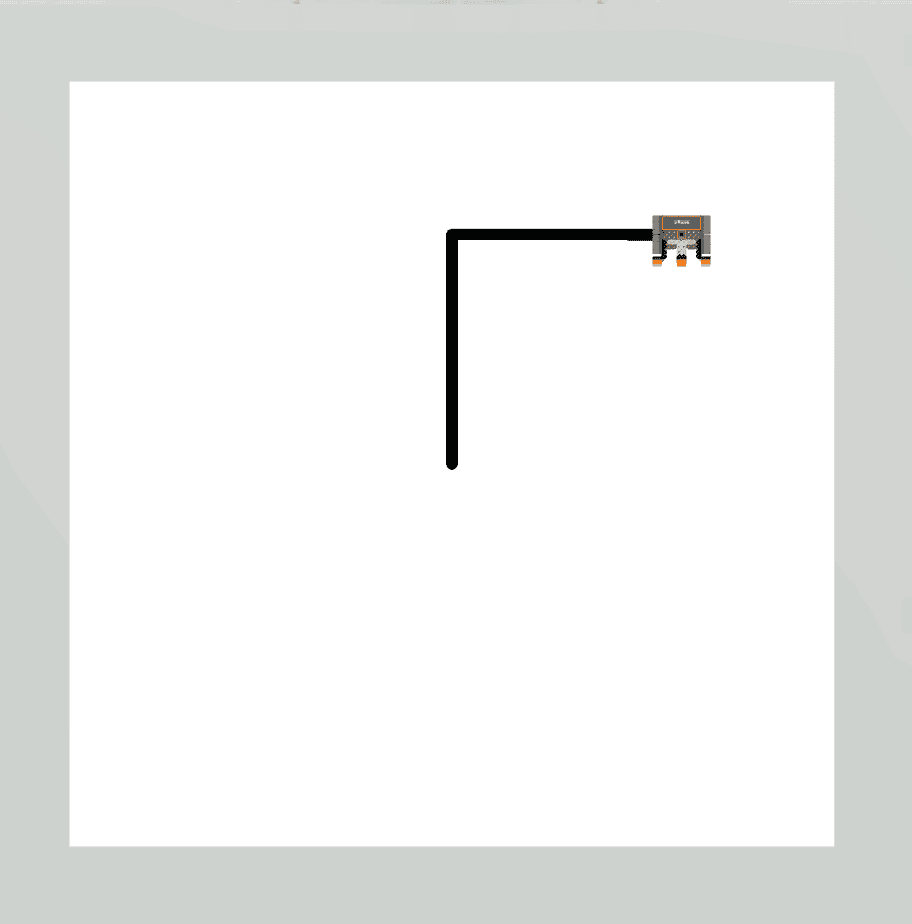
Perintah drivetrain dieksekusi 3 kali. |
 |
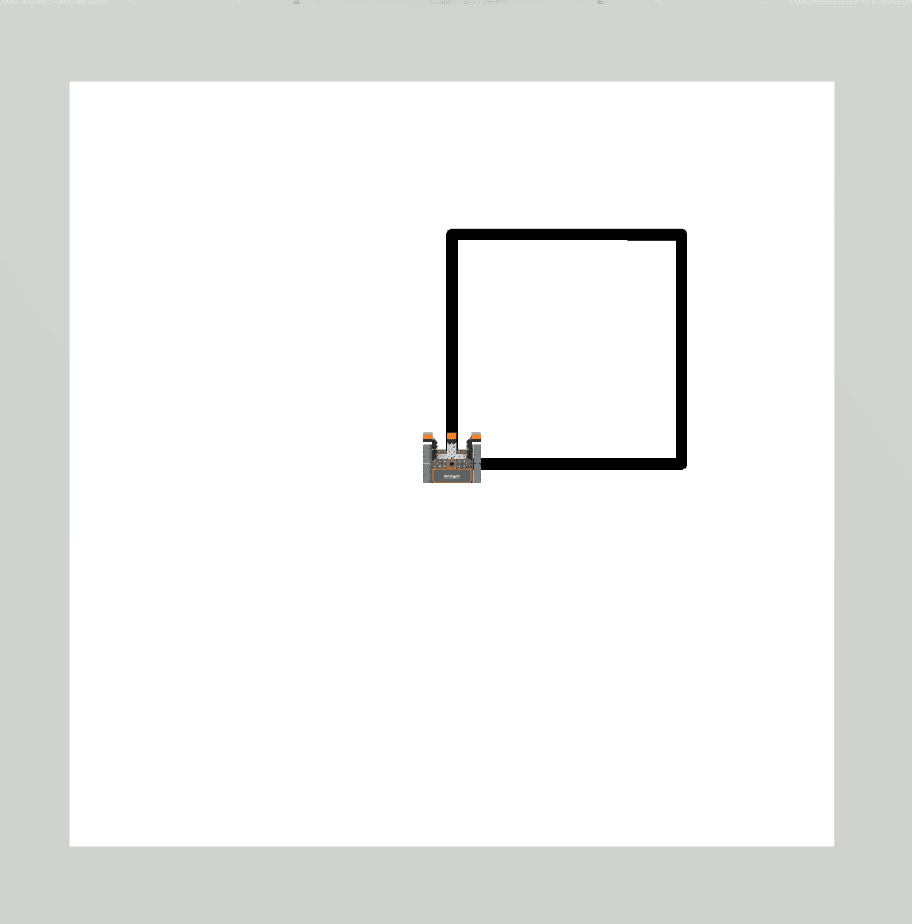 |
Perintah drivetrain dieksekusi 4 kali, melengkapi keempat sisi persegi. |
|
|
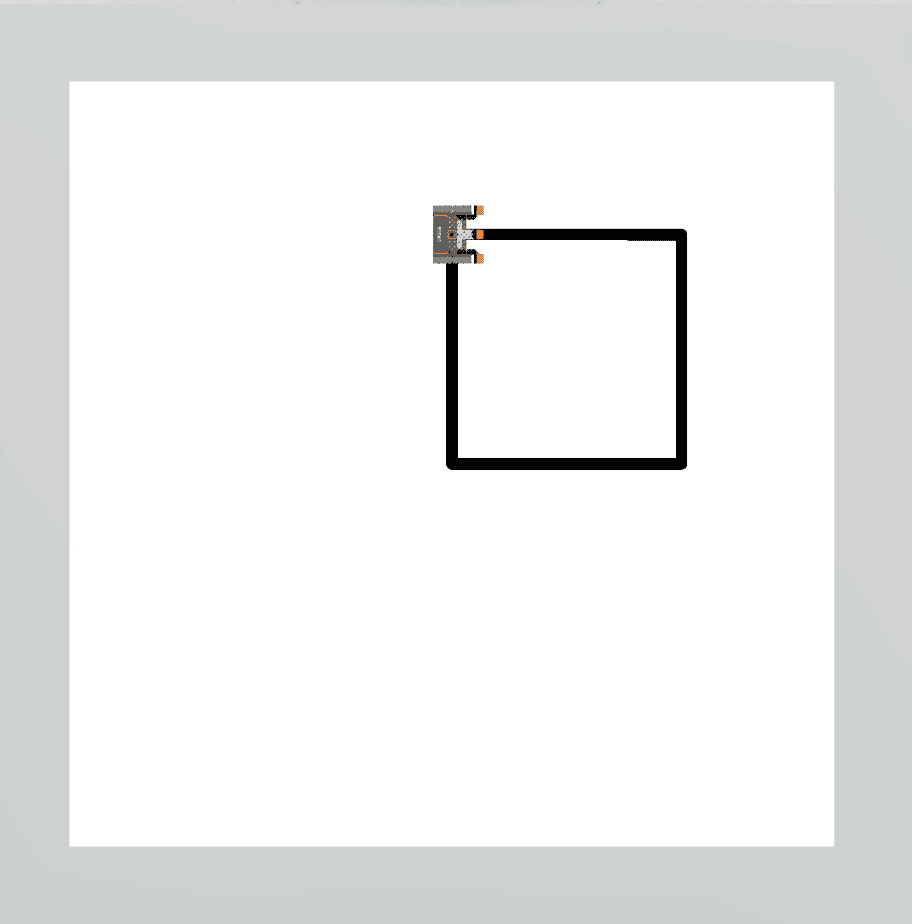 |
Perintah drivetrain dieksekusi 5 kali, melengkapi persegi, lalu menelusuri sisi pertama lagi. |
Perhatikan bahwa bentuk persegi yang digambar tidak berubah saat fungsirentangberubah dari empat ke lima; tetapi posisi akhir Robot VR berubah. Dengan demikian, menggunakan loopuntukdengan fungsi defaultrentangsepuluh, akan menghasilkan bentuk persegi yang sama yang digambar, tetapi Robot VR akan terus mengulangi perilaku tersebut sebanyak enam kali tambahan.
Robot VR akan bergerak melalui perintah dari header loop for hingga perintah indentasi terakhir. Header loopformengindikasikan bahwa Robot VR harus mengulang tindakan di dalam loop sejumlah kali yang ditentukan sebelum beralih ke perintah berikutnya di luar loop for. Baris yang menjorok menunjukkan perintah apa saja yang ada di dalam loop for dan harus diulang.
Untuk Informasi Anda
Dalam VEXcode VR, perintahwaitselalu ditambahkan dengan loopfor. Tujuan dari perintahwaitadalah untuk memastikan bahwa VEXcode VR dapat menjalankan proyek sebagaimana mestinya, karena platform VEXcode VR bersifat berbasis web. Perintahwaittidak boleh dihapus saat menggunakan loopfor, atau proyek Anda mungkin tidak berjalan sebagaimana mestinya.
Jumlah kali yang ditentukan di mana loop untuk diatur untuk dijalankan, memungkinkan proyek mengalir keluar dari loopuntukketika telah menyelesaikan iterasi yang diperlukan. Parameter fungsi rentangdalam loop untuk harus tercapai sebelum proyek berpindah ke perintah berikutnya di luar loop. Dalam contoh kode di bawah, setelah perintah Drivetrain dalam loopuntukdijalankan empat kali, proyek akan keluar dari loopuntuk, mengatur warna pena ke merah, dan melaju mundur. 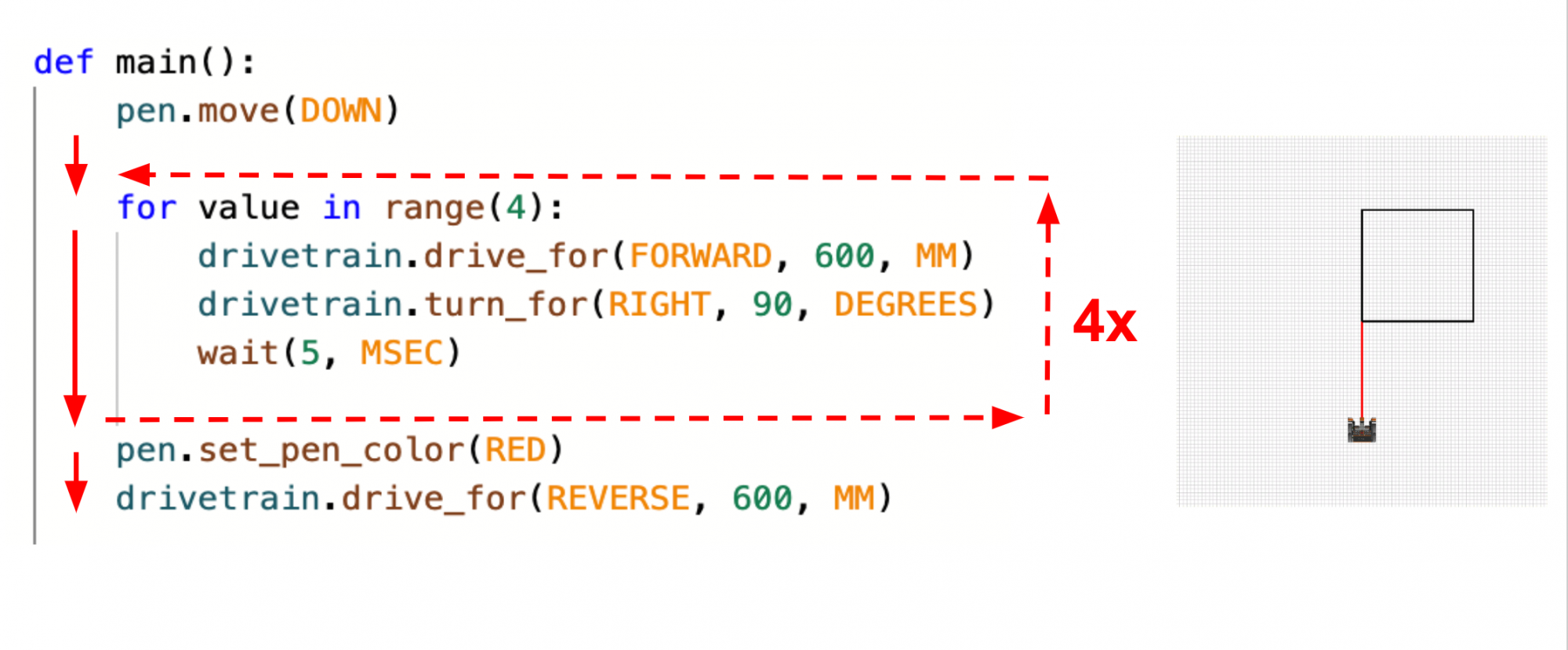
Tantangan Mini
Dalam proyek ini, Robot VR harus menggambar kotak biru di Art Canvas Playground, tetapi ada kesalahan dalam proyek. Edit proyek untuk menyelesaikan tantangan mini!
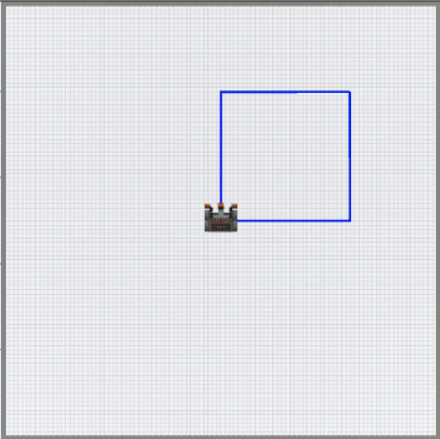
Video di bawah menunjukkan apa yang harus dilakukan untuk menyelesaikan tantangan mini. Robot mulai di tengah taman bermain dan menggambar keempat sisi persegi biru besar.
- Tonton video solusi dan tinjau bagaimana Robot VR harus bergerak untuk menyelesaikan tantangan mini.
- Ubah proyek Unit3Lesson2 agar sesuai dengan gambar ini, atau salin kode di bawah ini.
def main():
pen.move(BAWAH)
pen.set_pen_color(MERAH)
drivetrain.drive_for(MAJU, 600, MM)
untuk nilai dalam rentang(3):
drivetrain.drive_for(MAJU, 600, MM)
drivetrain.turn_for(KANAN, 90, DERAJAT)
tunggu (5, MSEC)- Mulai proyek dan identifikasi di mana Robot VR tidak menyelesaikan perilaku yang diharapkan.
- Ubah proyek dan jalankan proyek lagi. Lihat apakah Robot VR menyelesaikan perilaku yang diharapkan.
- Jika Robot VR tidak menggambar kotak biru, ulangi langkah sebelumnya dan coba lagi. Terus modifikasi dan jalankan proyek Anda hingga Robot VR menggambar kotak biru.
- Setelah Robot VR berhasil menggambar kotak biru di Art Canvas Playground, simpan proyek.
Selamat! Anda berhasil memecahkan tantangan mini!