
Lição 2: Fluxo de um Projeto com um Loop For
Quando um projeto utiliza um ciclo for , continua a seguir a mesma lógica ao executar os comandos. Por exemplo, esses dois exemplos de código farão com que o robô VR se mova da mesma maneira. No entanto, o projeto com o loop for repete os dois comandos do Drivetrain quatro vezes para o fazer.

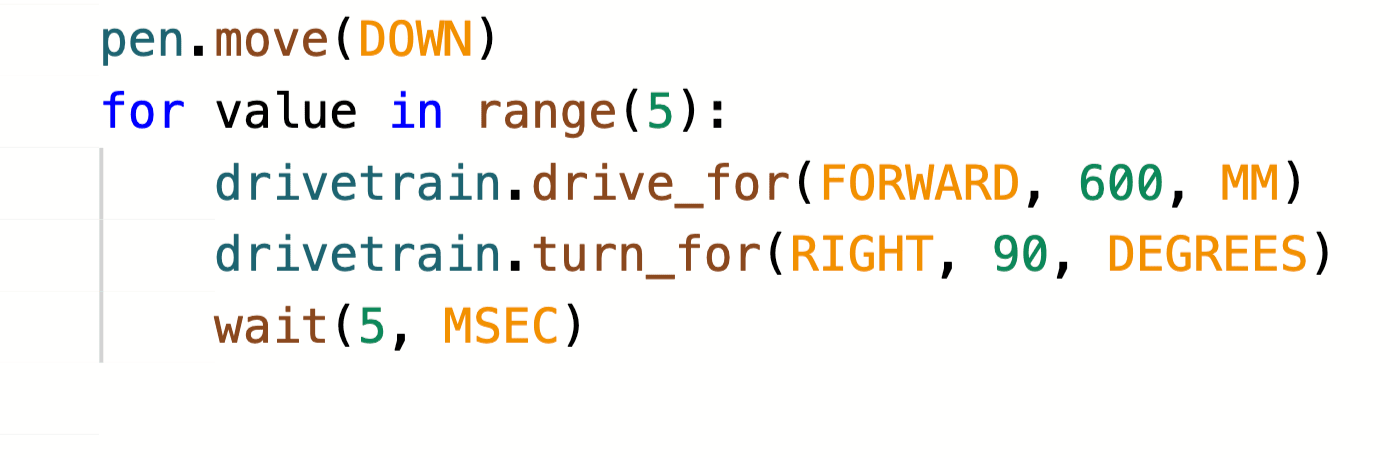
Um ciclo para é utilizado para repetir uma série de comandos um número especificado de vezes. O for loop repete (também conhecido como itera) sobre a sequência de comandos dentro dele. Num ciclo Python for , a variável 'value' é utilizada para acompanhar a iteração atual, e a palavra-chave 'in' utiliza a função range para especificar o número de iterações. 
A função intervalo identifica quantas vezes o ciclo deve iterar (ou repetir). Para repetir os comportamentos pelo número de vezes desejado, defina o parâmetro da função range.
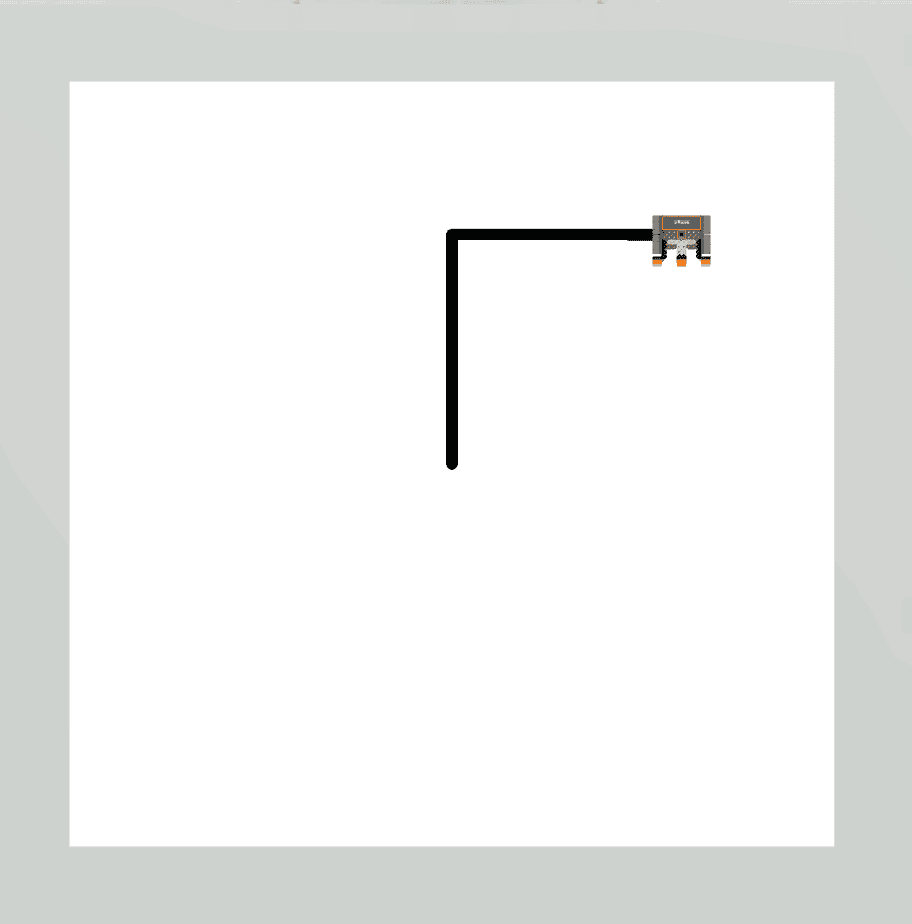
A função range cria essencialmente uma lista temporária que especifica por onde o ciclo deve iterar para ser concluído. No caso de comportamentos repetidos, como o desenho dos quatro lados de um quadrado, a função range utiliza uma lista temporária de (0, 1, 2, 3) para permitir que o VR Robot execute estes comandos quatro vezes. O movimento do Robô VR mudará dependendo do parâmetro da função range, conforme mostrado aqui.
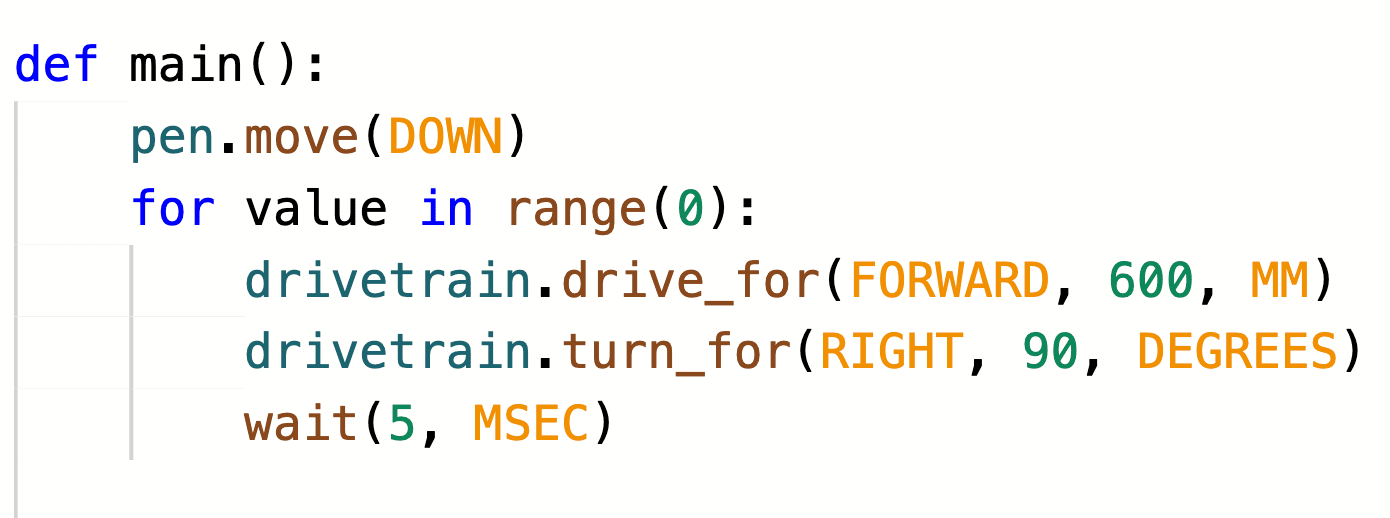 |
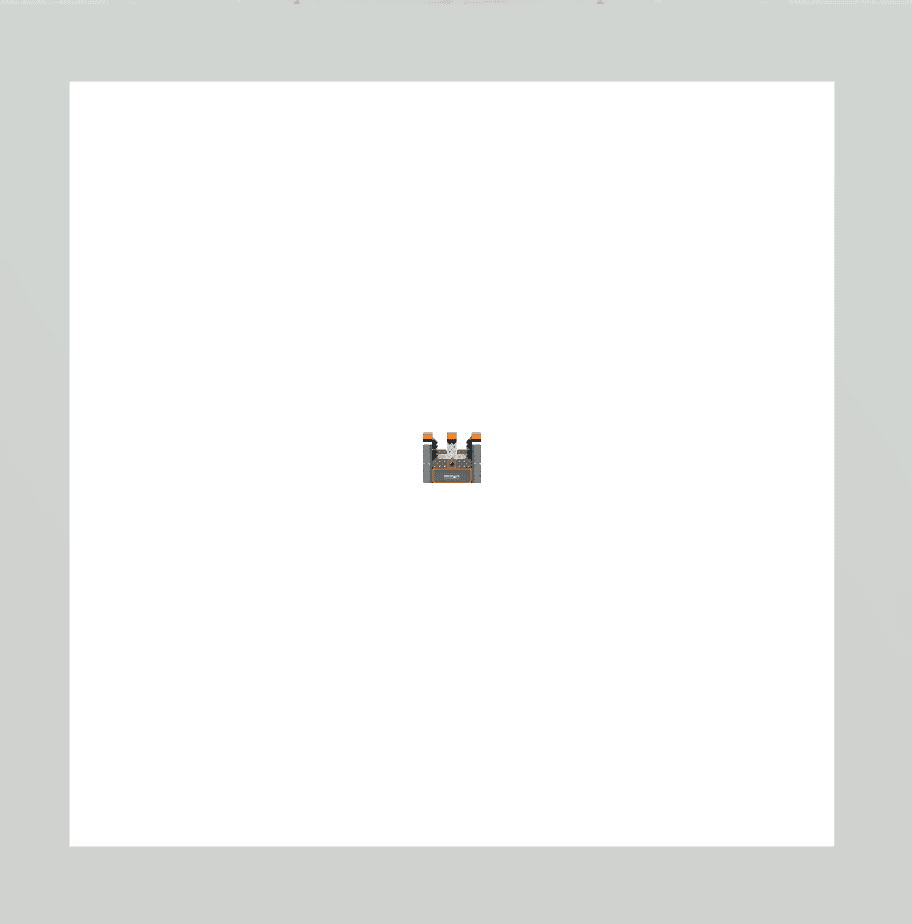 |
Comandos de transmissão executados 0 vezes. |
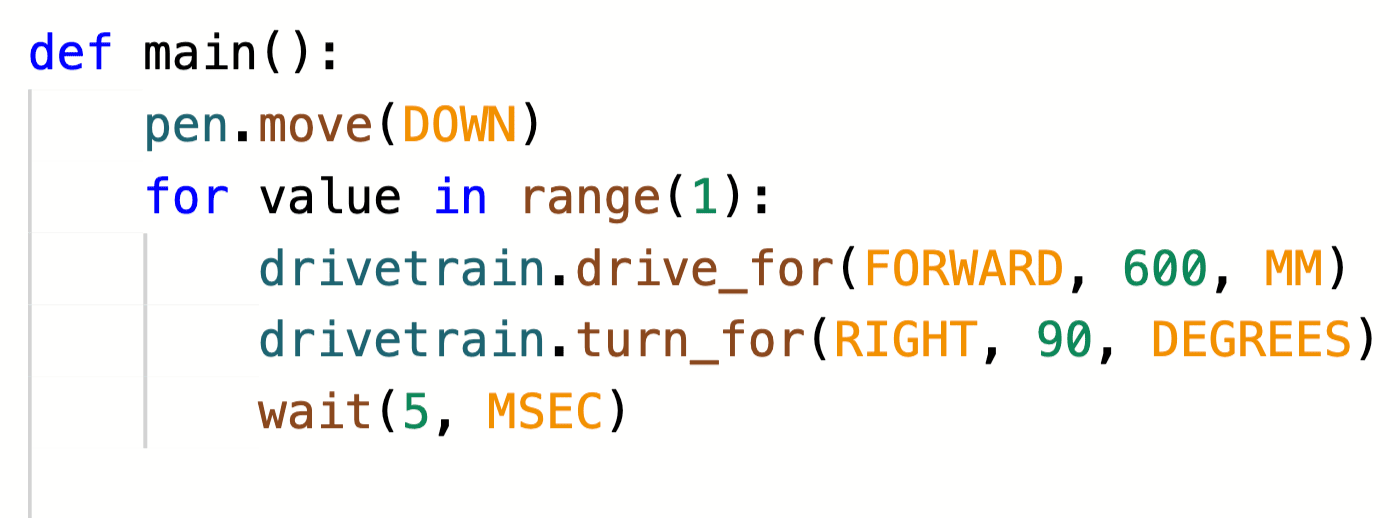 |
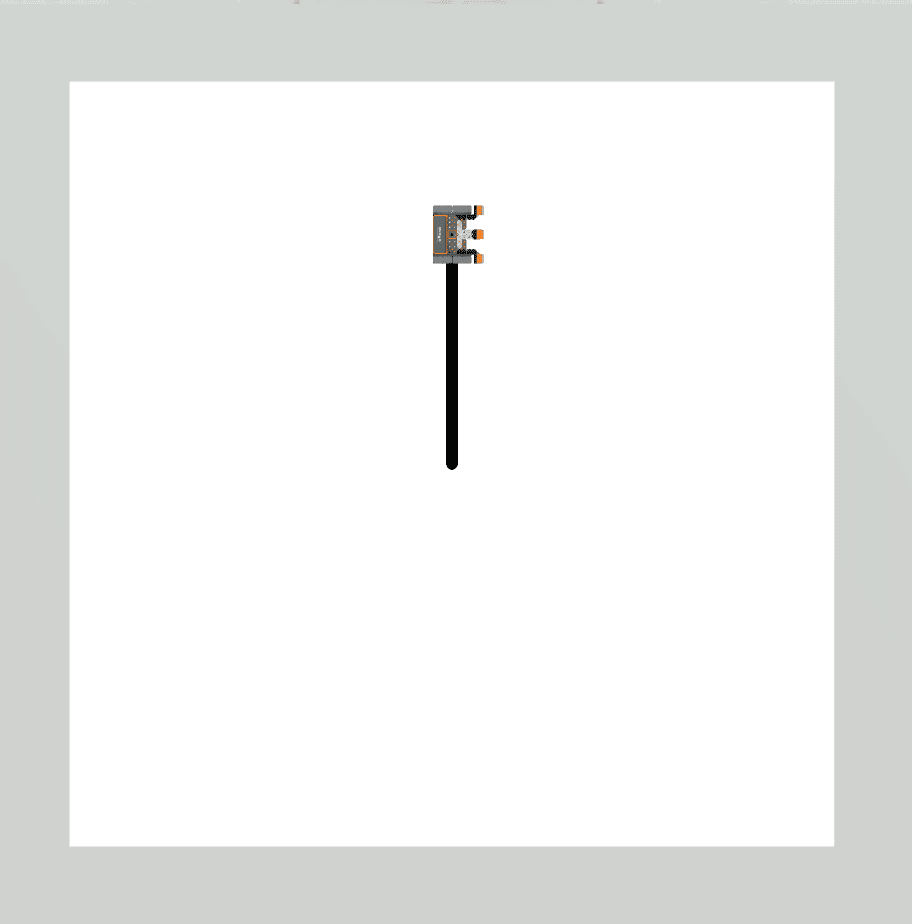 |
Comandos do sistema de transmissão executados 1 vez. |
 |
 |
Comandos de transmissão executados 2 vezes. |
 |
 |
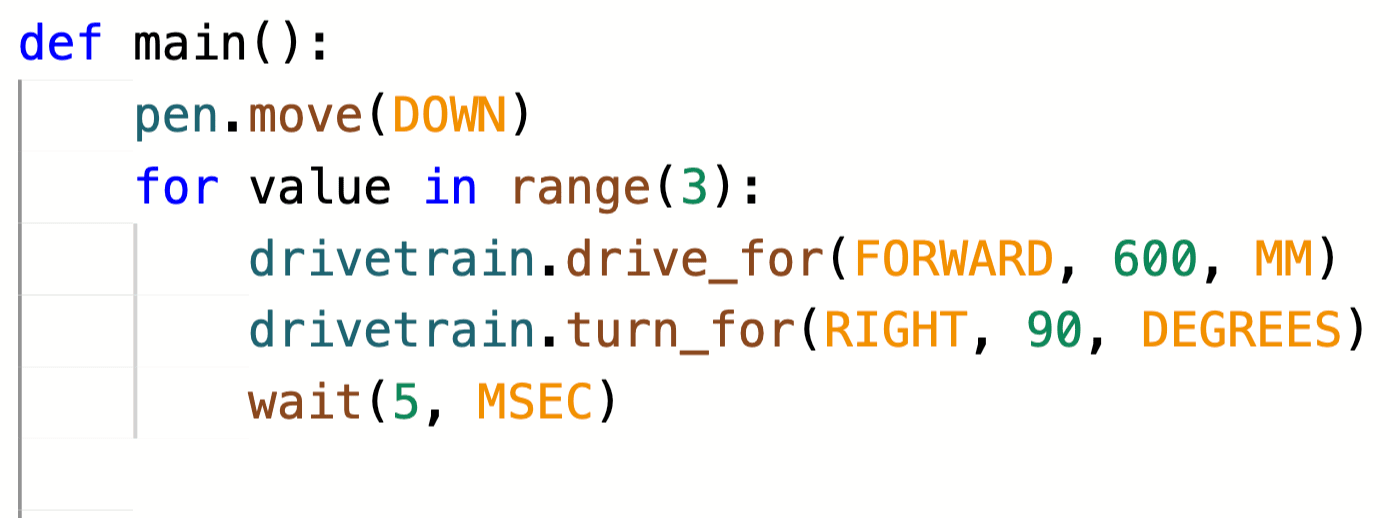
Comandos de transmissão executados 3 vezes. |
 |
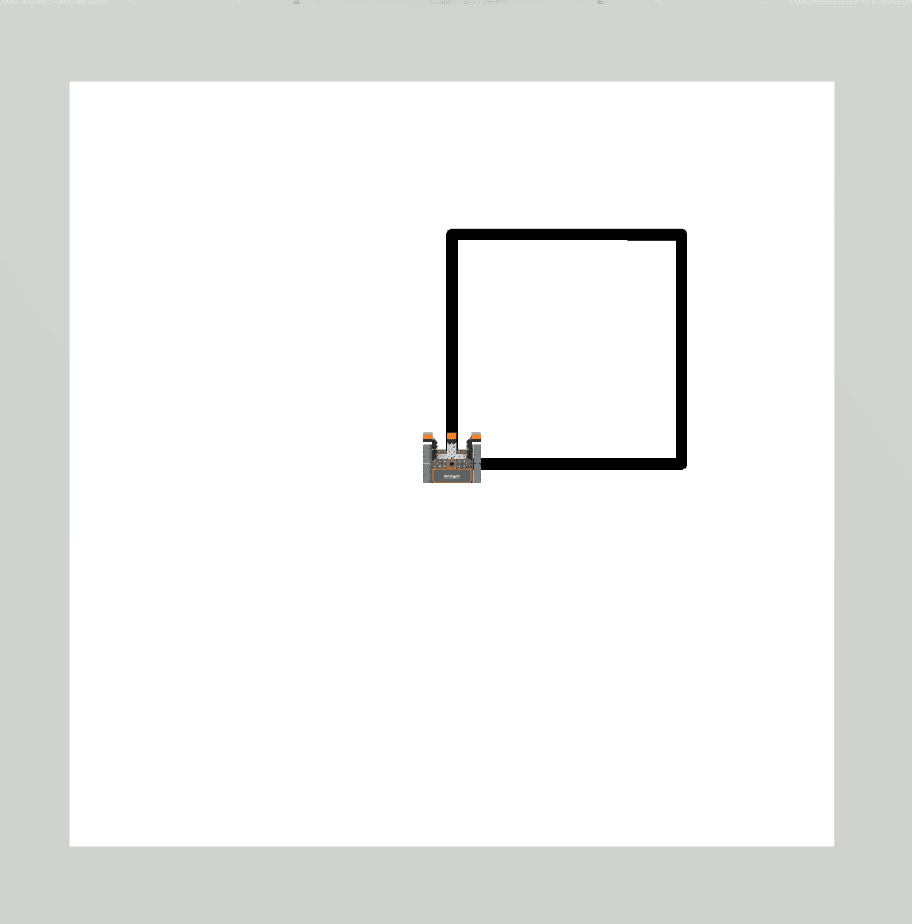 |
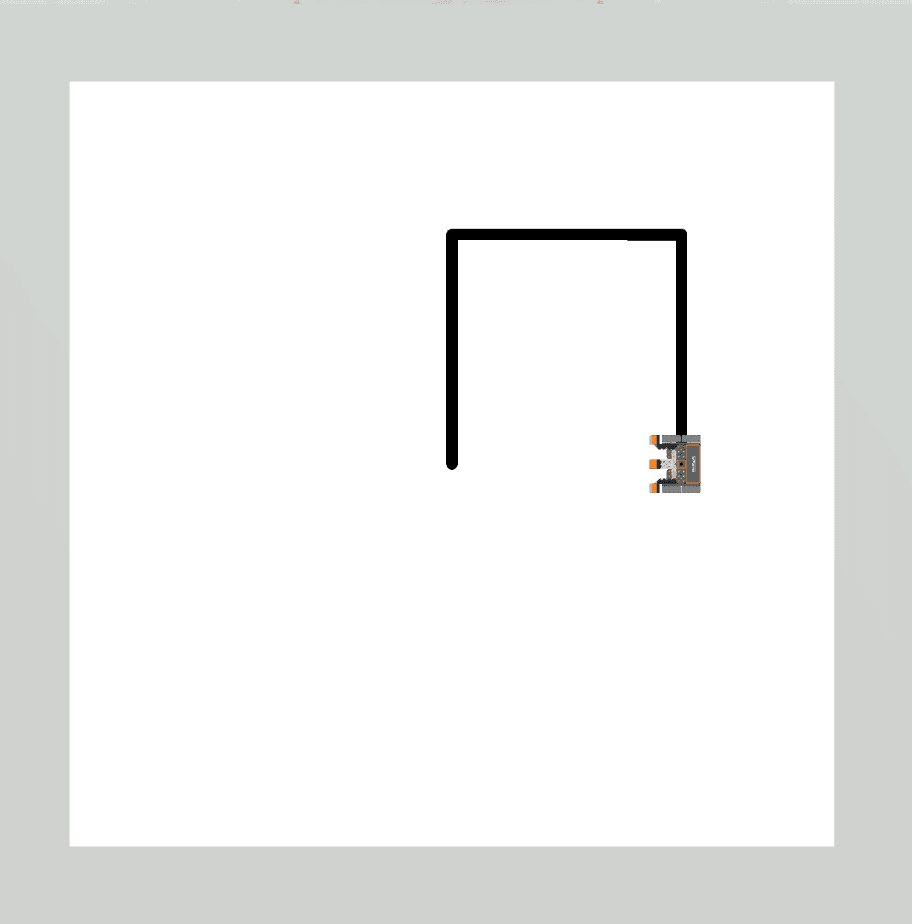
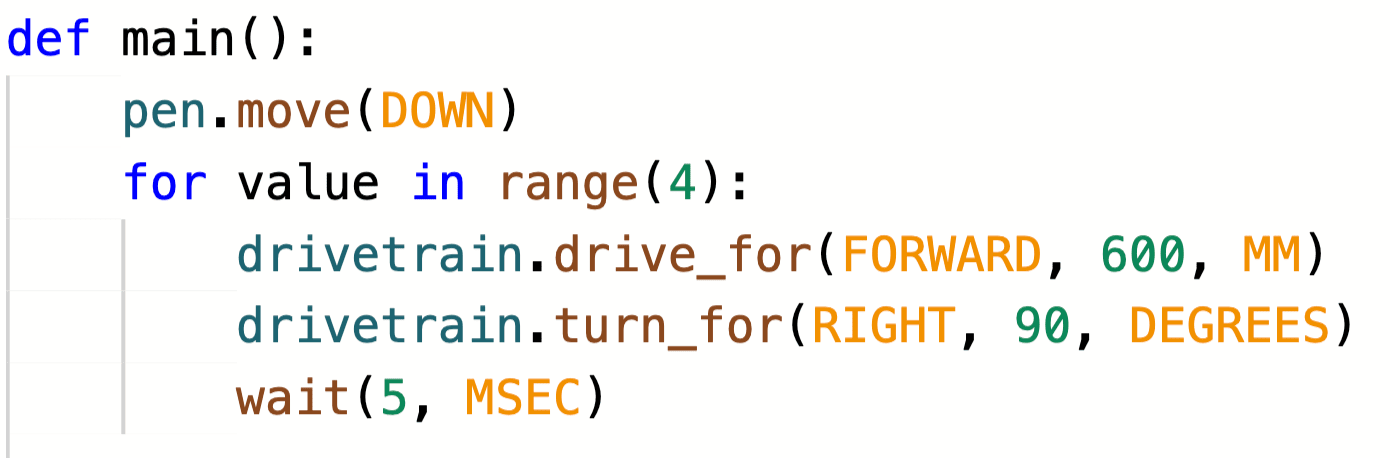
Comandos de transmissão executados 4 vezes, completando todos os 4 lados do quadrado. |
|
|
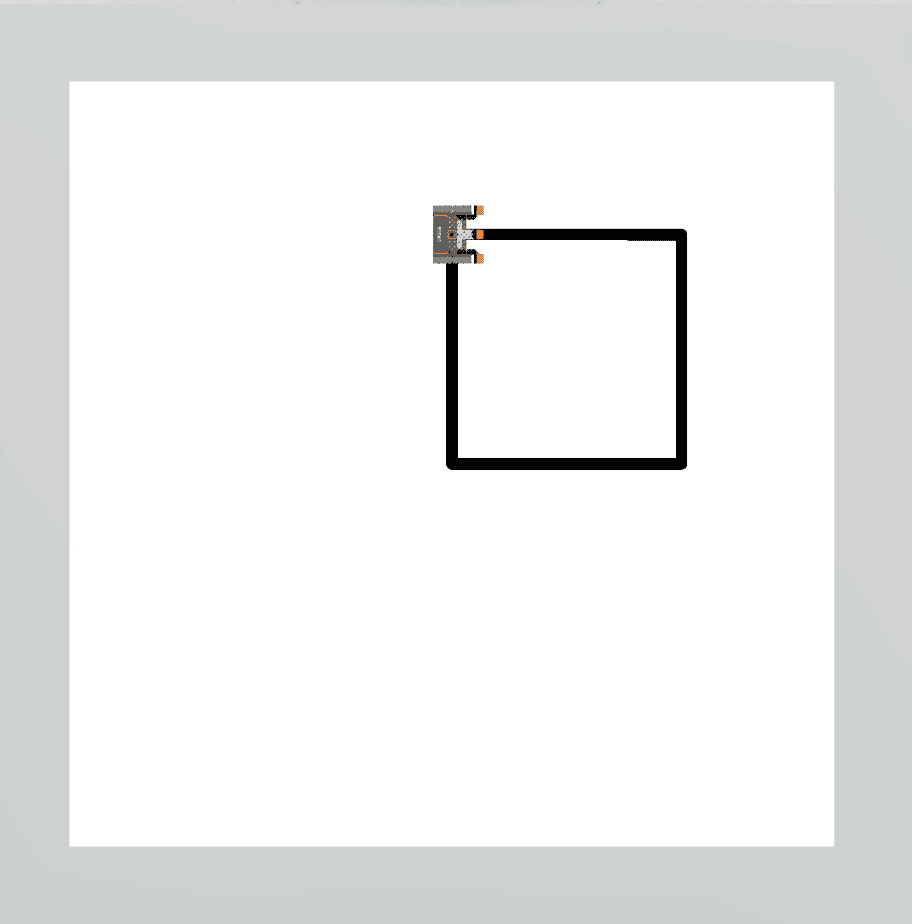 |
Comandos do sistema de transmissão executados 5 vezes, completando o quadrado e, em seguida, traçando o primeiro lado novamente. |
Note-se que a forma desenhada do quadrado não se alterou quando a função intervalo passou de quatro para cinco; mas a posição final do VR Robot sim. Como tal, a utilização de um ciclo para com o intervalo padrão função de dez resultaria no desenho da mesma forma quadrada, mas o robô VR continuaria a repetir os comportamentos por mais seis vezes.
O robô VR percorrerá os comandos do cabeçalho do ciclo for até ao último comando recuado. O cabeçalho do ciclo for indica que o robô VR deve repetir as ações dentro do ciclo o número de vezes especificado antes de passar para o próximo comando fora do ciclo for. As linhas recuadas indicam quais os comandos que estão dentro do ciclo por e devem ser repetidos.
Para sua informação
No VEXcode VR, é sempre adicionado um comando wait com o ciclo for . O objetivo do comando wait é garantir que o VEXcode VR pode executar corretamente o projeto como pretendido, devido à natureza baseada na web da plataforma VEXcode VR. O comando wait nunca deve ser eliminado quando se utiliza um ciclo for , ou o seu projeto pode não funcionar como esperado.

O número especificado de vezes que o loop for está definido para executar permite que o projeto flua para fora do loop for quando tiver concluído as iterações necessárias. O parâmetro da função intervalo no para loop deve ser atingido antes de o projeto passar para o próximo comando fora do loop. No exemplo de código abaixo, depois de os comandos Drivetrain no ciclo for terem sido executados quatro vezes, o projeto sairá do ciclo for , definirá a cor da caneta para vermelho, e conduzirá em marcha-atrás. 
Mini Desafio
Neste projeto, o Robô VR deve desenhar um quadrado azul no Art Canvas Playground, mas há erros no projeto. Edite o projeto para resolver o mini desafio!

O vídeo abaixo mostra o que fazer para completar o mini desafio. O robô começa no meio do playground e desenha os quatro lados de um grande quadrado azul.
- Assista ao vídeo da solução e analise como o robô de RV deve se mover para concluir o mini desafio.
- Modifique o projeto Unit3Lesson2 para corresponder a esta imagem ou copie o código abaixo.
def main():
pen.move(DOWN)
pen.set_pen_color(RED)
drivetrain.drive_for(FORWARD, 600, MM)
for value in range(3):
drivetrain.drive_for(FORWARD, 600, MM)
drivetrain.turn_for(RIGHT, 90, DEGREES)
wait (5, MSEC)- Iniciar o projeto e identificar onde o Robô VR não completa os comportamentos esperados.
- Modifique o projeto e execute-o novamente. Veja se o Robô de RV completa os comportamentos esperados.
- Se o Robô VR não desenhar um quadrado azul, repita a etapa anterior e tente novamente. Continue a modificar e executar o seu projeto até que o Robô VR desenhe um quadrado azul.
- Assim que o Robô de RV desenhar com sucesso um quadrado azul no Art Canvas Playground, salve o projeto.
Parabéns! Você resolveu o mini desafio!
Perguntas
Selecione uma ligação abaixo para aceder ao questionário da aula.
Google Doc / .docx / .pdf