
পাঠ ২: একটি ফর লুপ সহ একটি প্রকল্পের প্রবাহ
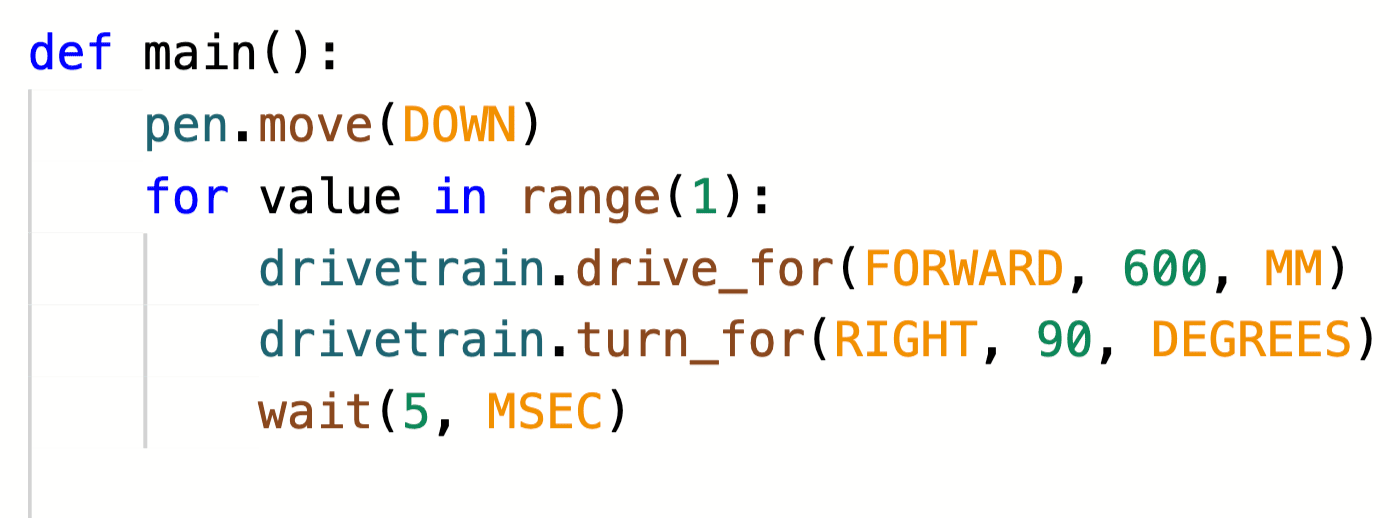
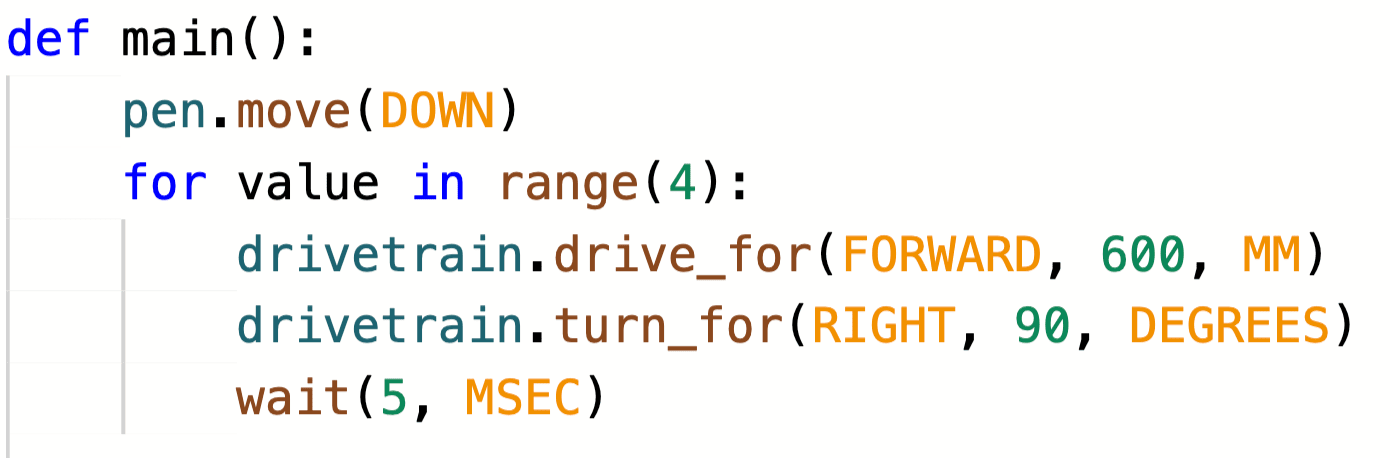
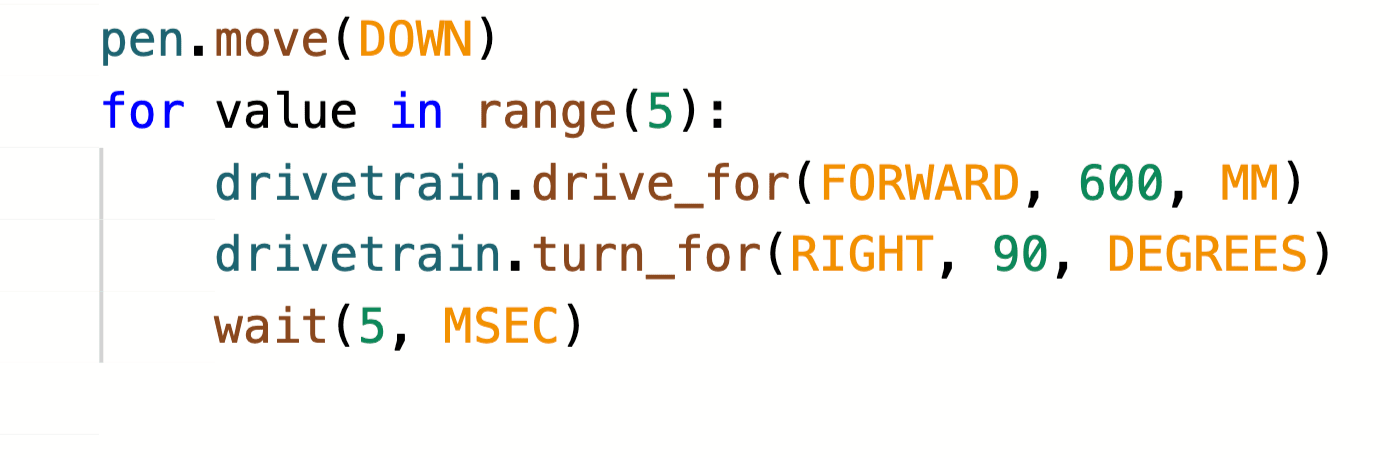
যখন একটি প্রকল্প লুপের জন্য ব্যবহার করে, তখনও এটি কমান্ডগুলি কার্যকর করার সময় একই যুক্তি অনুসরণ করে। উদাহরণস্বরূপ, এই দুটি কোড নমুনা VR রোবটকে একইভাবে চলতে সাহায্য করবে। যাইহোক,forলুপ সহ প্রকল্পটি, এটি করার জন্য দুটি ড্রাইভট্রেন কমান্ড চারবার পুনরাবৃত্তি করে।
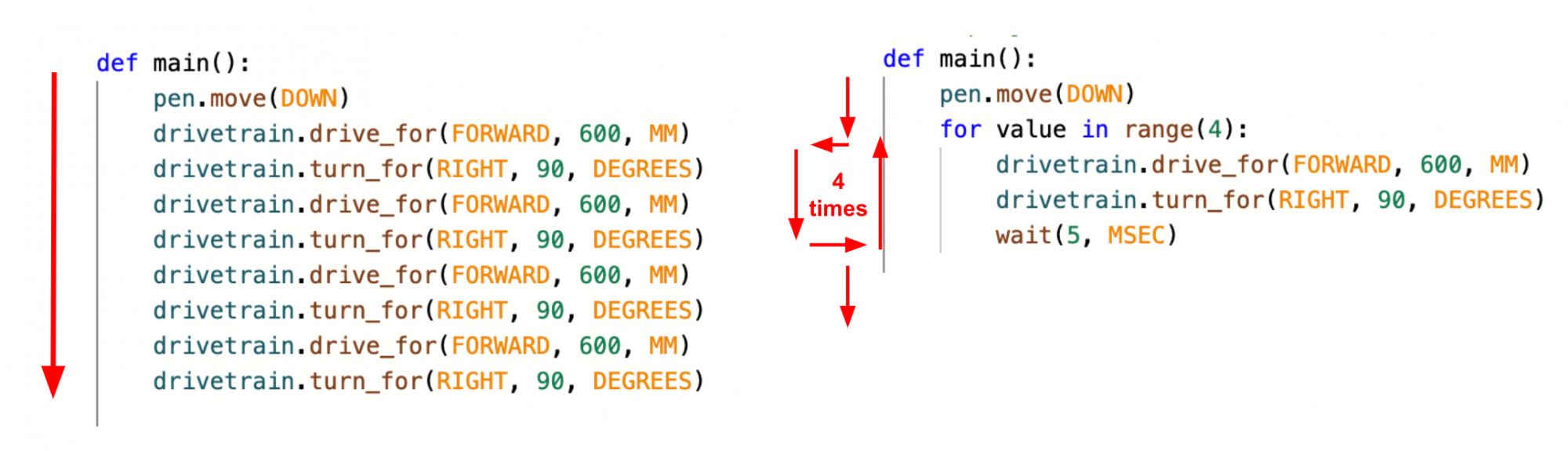
একটি for লুপ নির্দিষ্ট সংখ্যক বার কমান্ডের একটি সিরিজ পুনরাবৃত্তি করতে ব্যবহৃত হয়। for লুপটি এর ভিতরে থাকা কমান্ডের ক্রম অনুসারে পুনরাবৃত্তি করে (যাকে iteratesও বলা হয়)। লুপের জন্য একটি Python এ, বর্তমান পুনরাবৃত্তি ট্র্যাক করতে 'মান' ভেরিয়েবল ব্যবহার করা হয় এবং 'in' কীওয়ার্ডটি পুনরাবৃত্তির সংখ্যা নির্দিষ্ট করতে রেঞ্জফাংশন ব্যবহার করে। 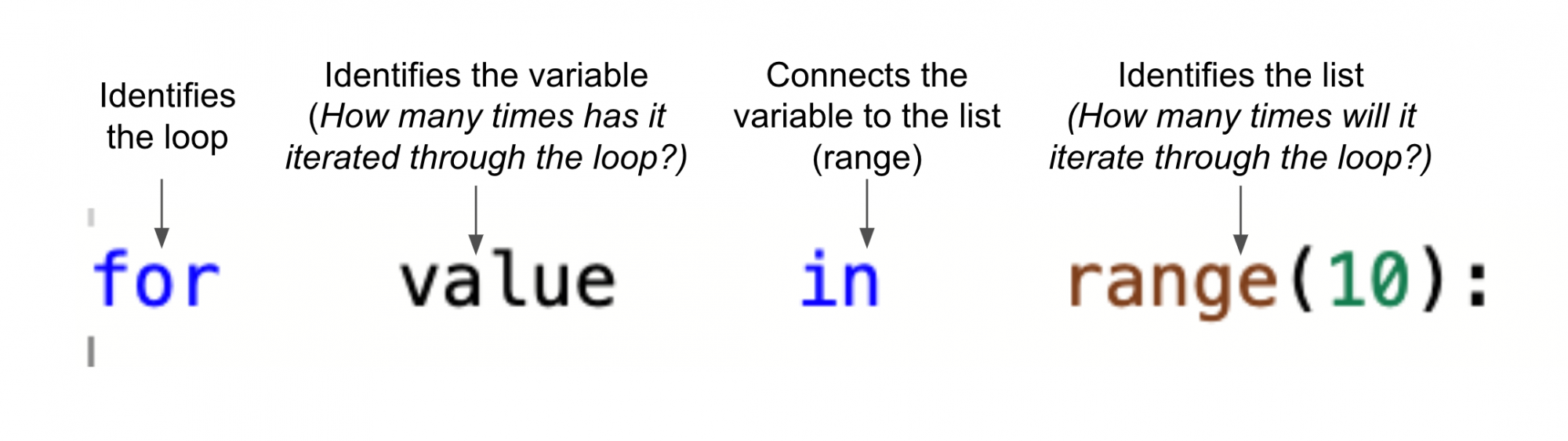
রেঞ্জ ফাংশনটি লুপটি কতবার পুনরাবৃত্তি (অথবা পুনরাবৃত্তি) করা উচিত তা চিহ্নিত করে। পছন্দসই সংখ্যক বার আচরণগুলি পুনরাবৃত্তি করতে, পরিসর ফাংশনের প্যারামিটার সেট করুন।
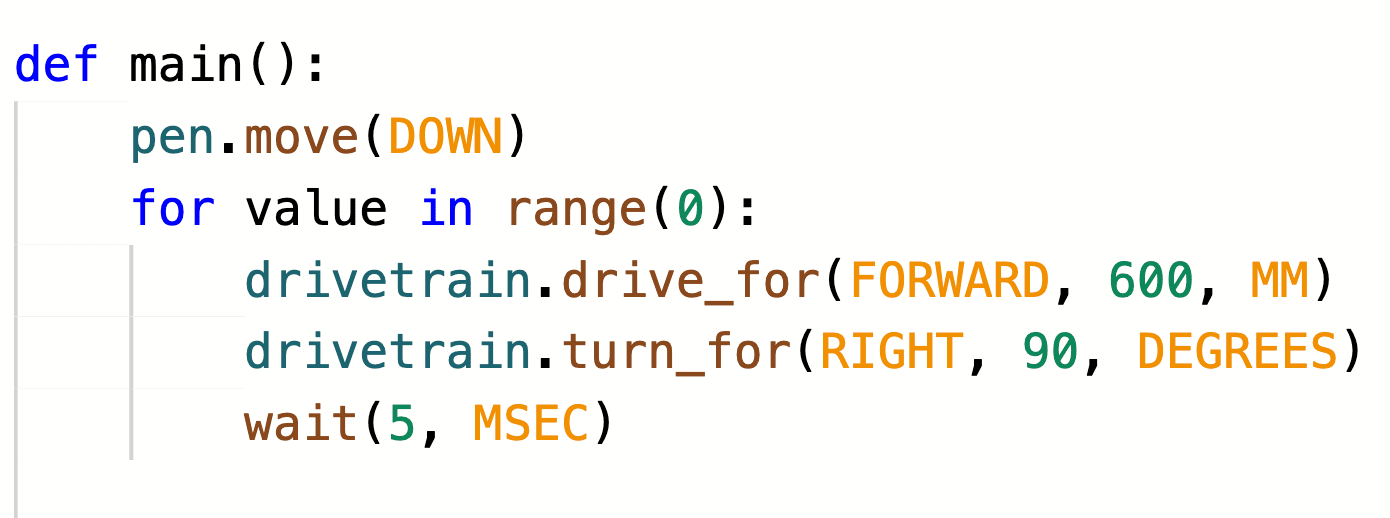
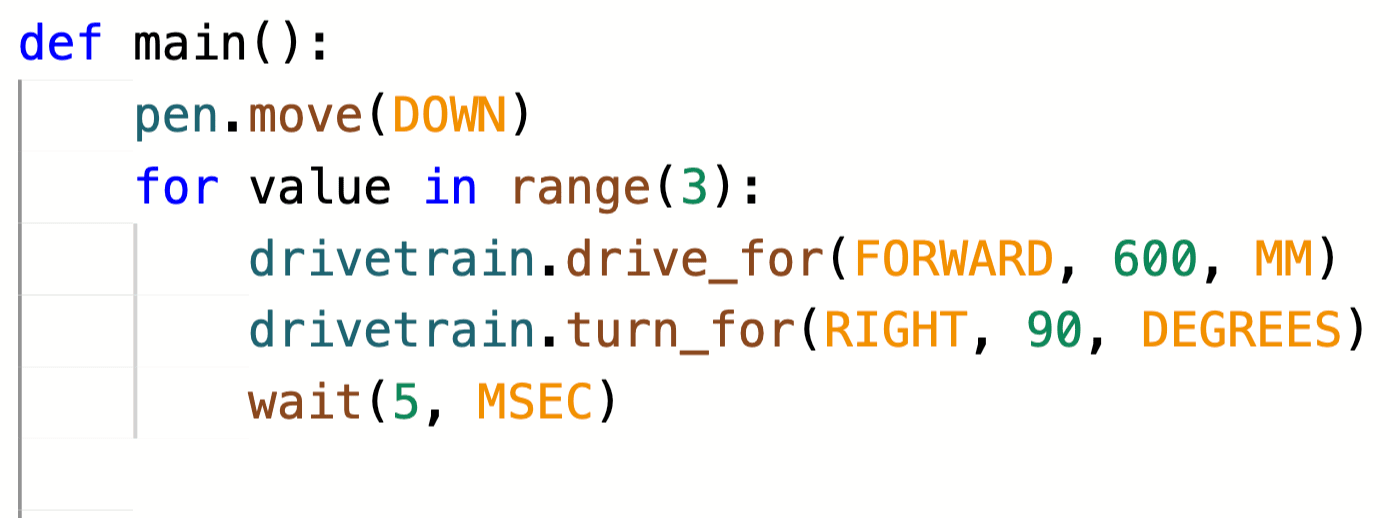
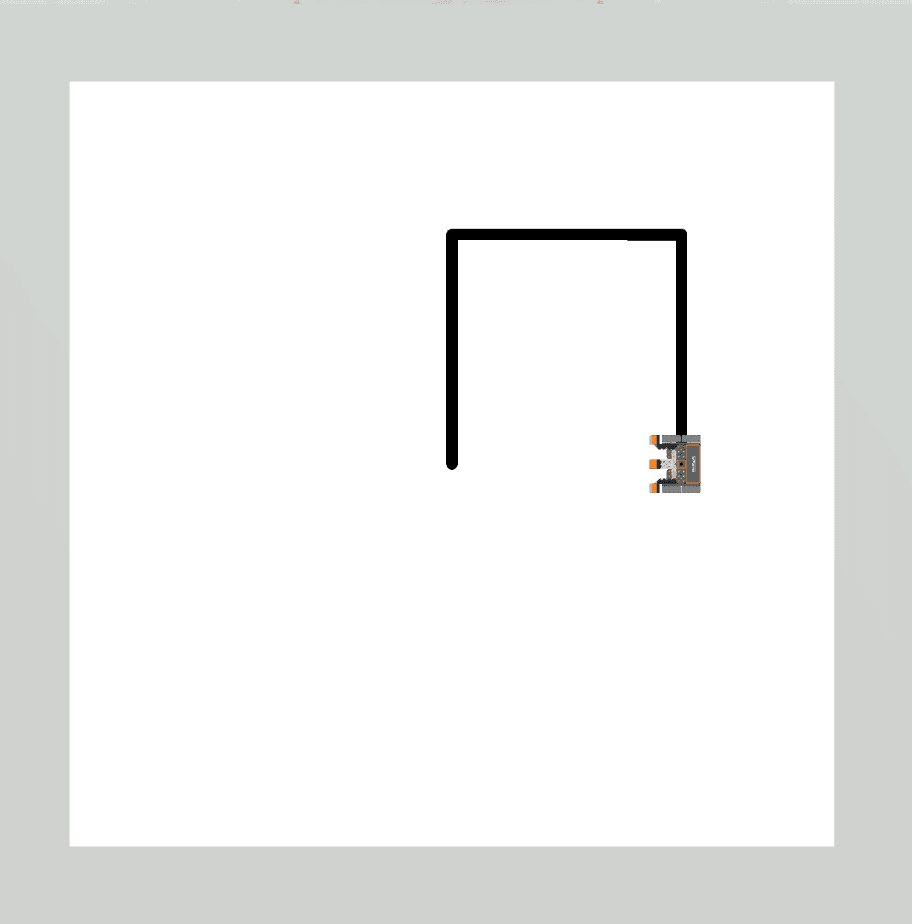
রেঞ্জ ফাংশনটি মূলত একটি অস্থায়ী তালিকা তৈরি করে যা লুপটি সম্পূর্ণ করার জন্য কোন কোন মাধ্যমে পুনরাবৃত্তি করা উচিত তা নির্দিষ্ট করে। বর্গক্ষেত্রের চারটি বাহু আঁকার মতো পুনরাবৃত্তিমূলক আচরণের ক্ষেত্রে, রেঞ্জ ফাংশনটি (0, 1, 2, 3) এর একটি অস্থায়ী তালিকা ব্যবহার করে VR রোবটকে চারবার সেই কমান্ডগুলি কার্যকর করতে সক্ষম করে। এখানে দেখানো হয়েছে, রেঞ্জ ফাংশনের প্যারামিটারের উপর নির্ভর করে VR রোবটের গতিবিধি পরিবর্তিত হবে।
 |
 |
ড্রাইভট্রেন কমান্ড 0 বার কার্যকর করা হয়েছে। |
 |
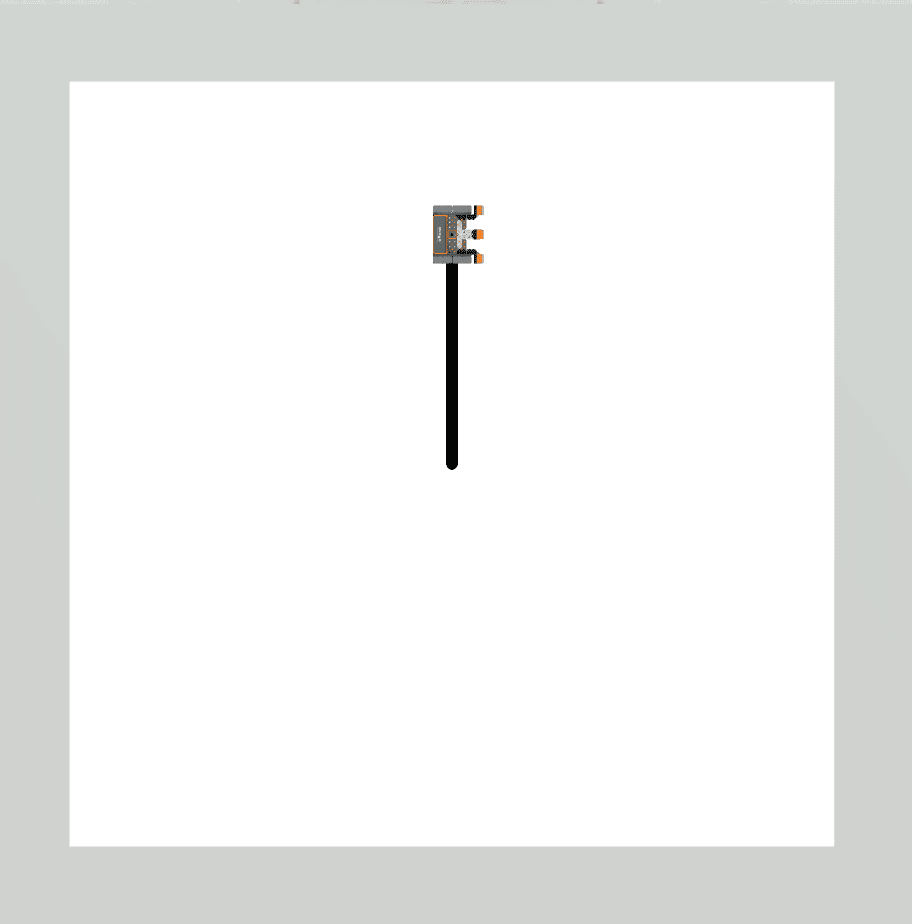 |
ড্রাইভট্রেন কমান্ড ১ বার কার্যকর করা হয়েছে। |
 |
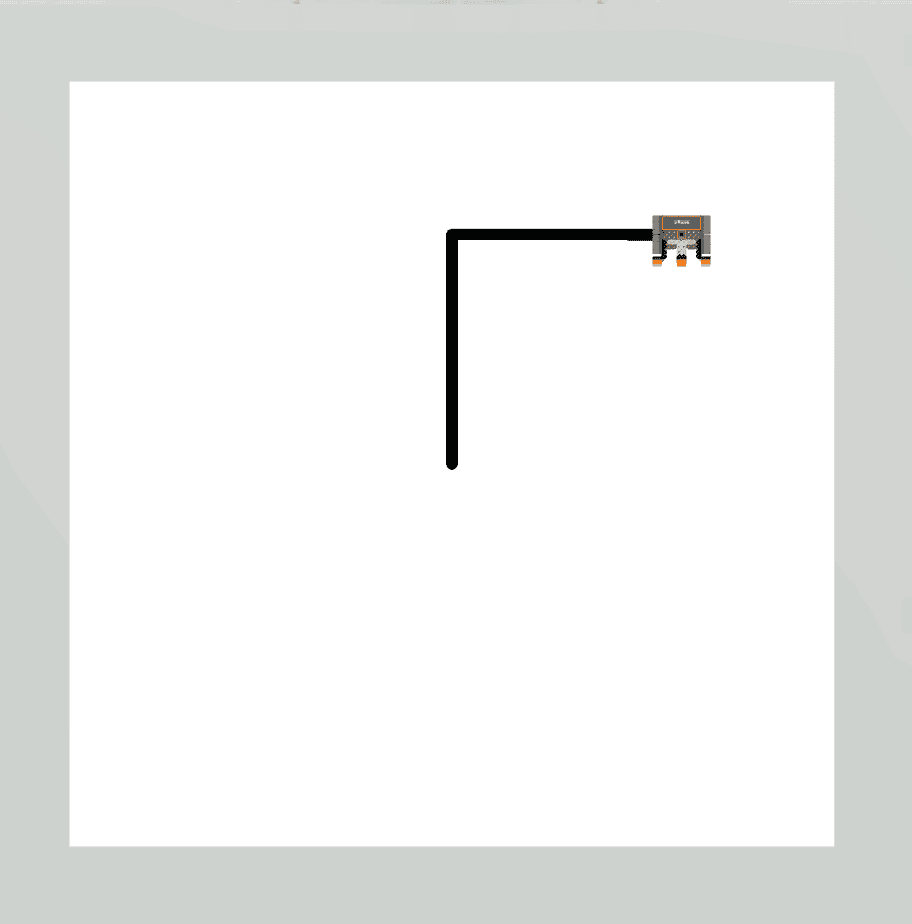 |
ড্রাইভট্রেন কমান্ডগুলি ২ বার কার্যকর করা হয়েছে। |
 |
 |
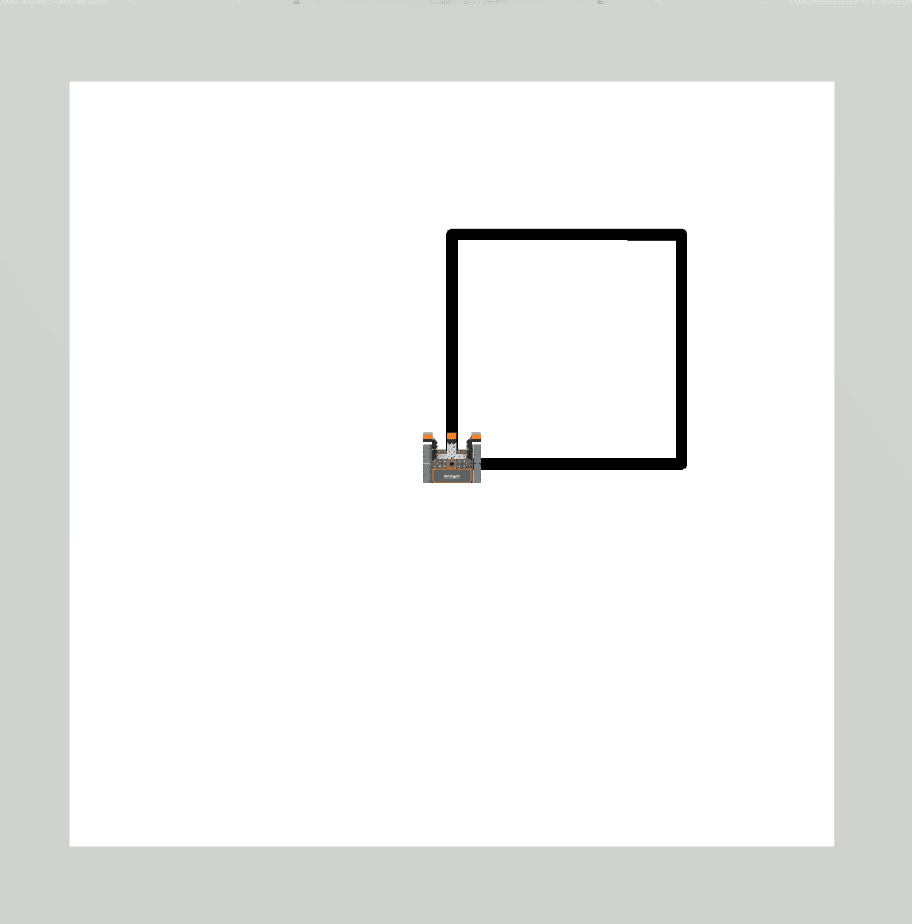
ড্রাইভট্রেন কমান্ডগুলি ৩ বার কার্যকর করা হয়েছে। |
 |
 |
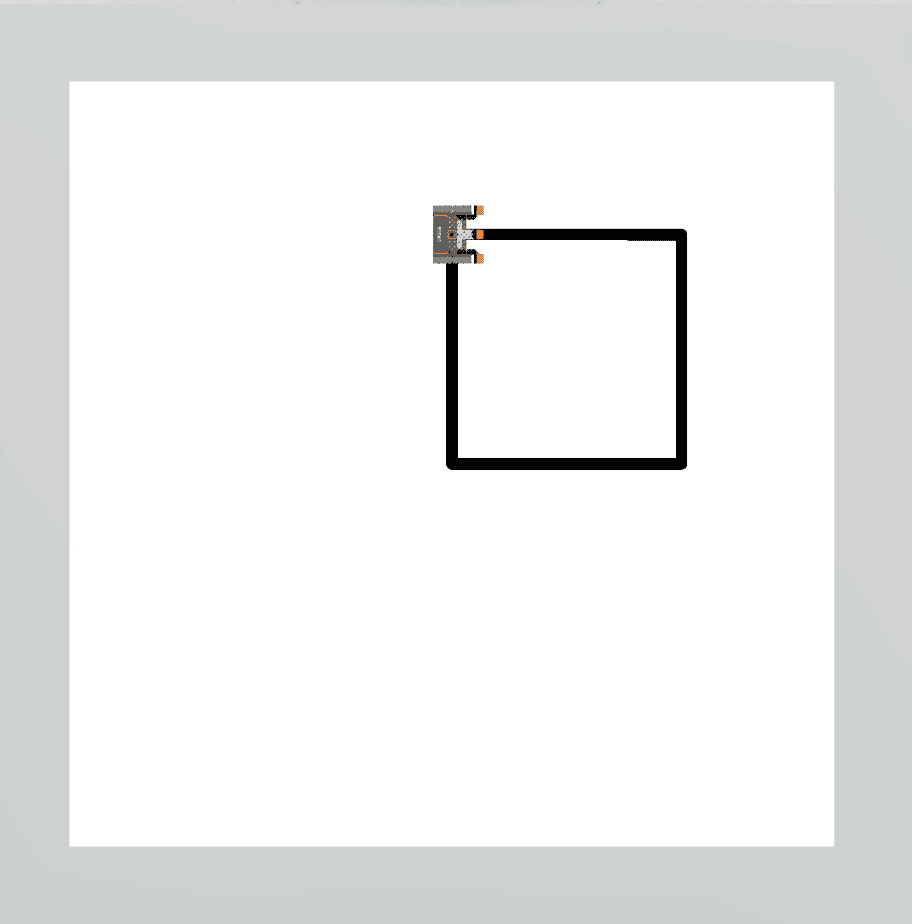
ড্রাইভট্রেন কমান্ডগুলি 4 বার কার্যকর করা হয়েছে, বর্গক্ষেত্রের 4 টি দিক সম্পূর্ণ করে। |
|
|
 |
ড্রাইভট্রেন কমান্ডগুলি ৫ বার কার্যকর করা হয়েছে, বর্গক্ষেত্রটি সম্পূর্ণ করা হয়েছে, তারপর আবার প্রথম দিকে ট্রেস করা হয়েছে। |
লক্ষ্য করুন যেরেঞ্জফাংশনটি চার থেকে পাঁচে পরিবর্তিত হলে বর্গক্ষেত্রের আঁকা আকৃতি পরিবর্তিত হয়নি; তবে VR রোবটের চূড়ান্ত অবস্থান পরিবর্তিত হয়েছে। অতএব, ডিফল্টরেঞ্জফাংশন দশের সাথেলুপের জন্যব্যবহার করলে একই বর্গাকার আকৃতি আঁকা হবে, কিন্তু VR রোবট অতিরিক্ত ছয়বার আচরণগুলি পুনরাবৃত্তি করতে থাকবে।
ভিআর রোবটটি ফর লুপ হেডার থেকে শেষ ইন্ডেন্টেড কমান্ডে কমান্ডের মধ্য দিয়ে যাবে। লুপের জন্যহেডারটি নির্দেশ করে যে VR রোবটকে লুপের ভিতরের ক্রিয়াগুলি নির্দিষ্ট সংখ্যক বার পুনরাবৃত্তি করতে হবে এবং তারপর for লুপের বাইরে পরবর্তী কমান্ডে যেতে হবে। ইন্ডেন্ট করা লাইনগুলি নির্দেশ করে যে এর ভিতরে লুপের জন্য কোন কমান্ডগুলি রয়েছে এবং পুনরাবৃত্তি করা উচিত।
আপনার তথ্যের জন্য
VEXcode VR-তে,forলুপের সাথে সর্বদা একটিwaitকমান্ড যোগ করা হয়। waitকমান্ডের উদ্দেশ্য হল VEXcode VR যাতে প্রকল্পটি যথাযথভাবে পরিচালনা করতে পারে তা নিশ্চিত করা, কারণ VEXcode VR প্ল্যাটফর্মটি ওয়েব-ভিত্তিক। forলুপ ব্যবহার করার সময়waitকমান্ডটি কখনই মুছে ফেলা উচিত নয়, অন্যথায় আপনার প্রকল্পটি ইচ্ছাকৃতভাবে নাও চলতে পারে।
for লুপটি যতবার কার্যকর করার জন্য সেট করা হয়েছে, তা প্রয়োজনীয় পুনরাবৃত্তি সম্পন্ন করার পরে প্রকল্পটিকেforলুপের মধ্য দিয়ে প্রবাহিত করতে সক্ষম করে। প্রকল্পটি লুপের বাইরে পরবর্তী কমান্ডে যাওয়ার আগে for লুপে rangeফাংশনের প্যারামিটারে পৌঁছাতে হবে। নিচের কোড নমুনায়,forলুপে Drivetrain কমান্ডগুলি চারবার কার্যকর করার পরে, প্রকল্পটিforলুপ থেকে বেরিয়ে আসবে, কলমের রঙ লাল করবে এবং বিপরীত দিকে ড্রাইভ করবে। 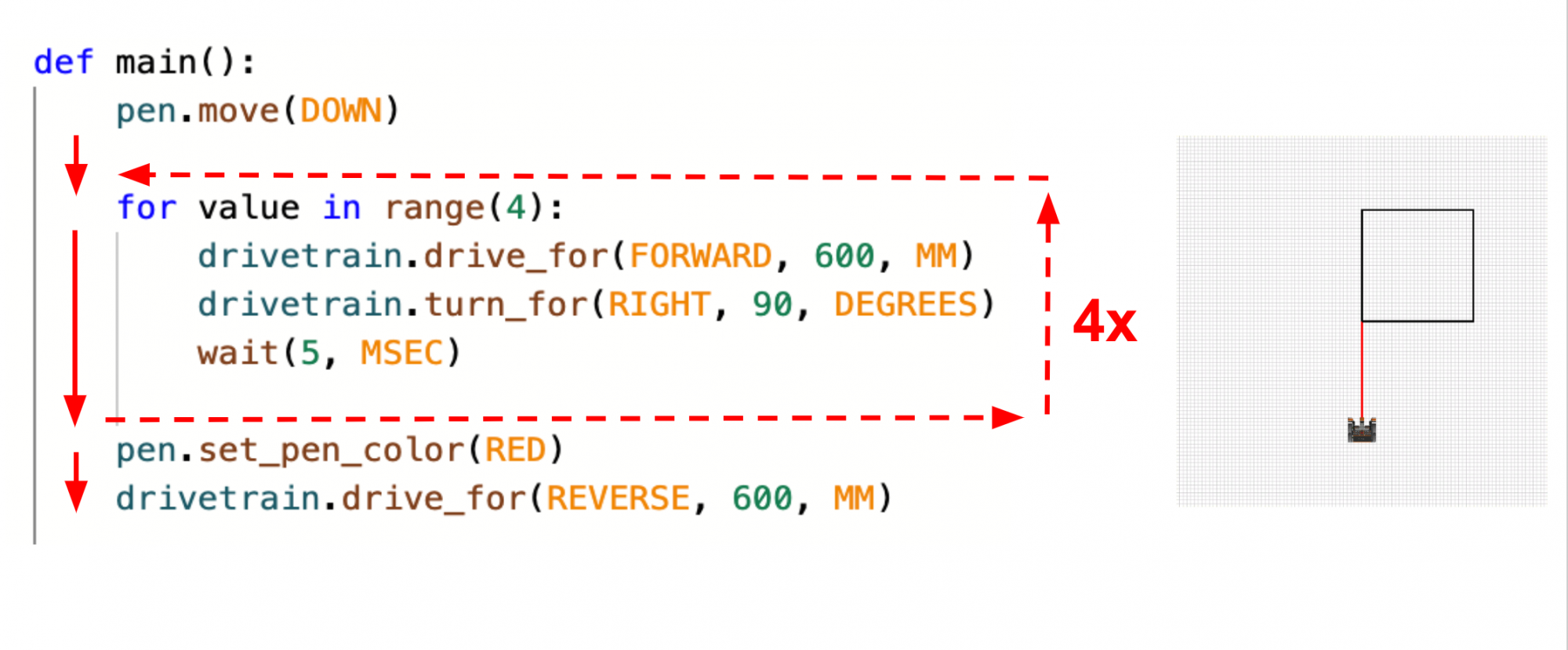
মিনি চ্যালেঞ্জ
এই প্রকল্পে, VR রোবটটিকে আর্ট ক্যানভাস খেলার মাঠ, এ একটি নীল বর্গক্ষেত্র আঁকতে হবে কিন্তু প্রকল্পে ত্রুটি রয়েছে৷ মিনি চ্যালেঞ্জ সমাধান প্রকল্প সম্পাদনা করুন!
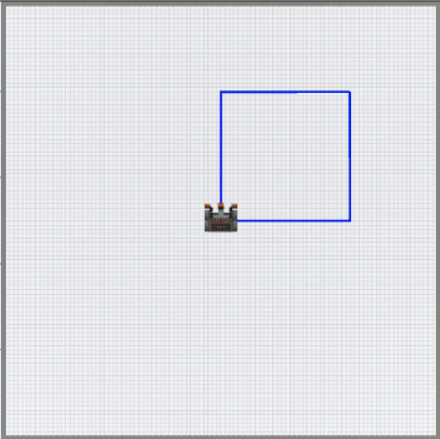
নিচের ভিডিওটিতে মিনি চ্যালেঞ্জটি সম্পন্ন করার জন্য কী করতে হবে তা দেখানো হয়েছে। রোবটটি খেলার মাঠের মাঝখান থেকে শুরু করে এবং একটি বৃহৎ নীল বর্গক্ষেত্রের চার দিক আঁকে।
- সমাধান ভিডিওটি দেখুন এবং মিনি চ্যালেঞ্জটি সম্পূর্ণ করার জন্য VR রোবটকে কীভাবে সরানো উচিত তা পর্যালোচনা করুন।
- এই ছবিটির সাথে মেলে Unit3Lesson2 প্রকল্পটি পরিবর্তন করুন, অথবা নীচের কোডটি অনুলিপি করুন।
def main():
pen.move(DOWN)
pen.set_pen_color(RED)
drivetrain.drive_for(FORWARD, 600, MM)
রেঞ্জের মানের জন্য (3):
drivetrain.drive_for(FORWARD, 600, MM)
drivetrain.turn_for(RIGHT, 90, DEGREES)
wait (5, MSEC)- প্রজেক্ট শুরু করুন এবং কোথায় VR রোবট প্রত্যাশিত আচরণ সম্পূর্ণ করে না তা চিহ্নিত করুন।
- প্রকল্পটি সংশোধন করুন এবং আবার প্রকল্পটি চালান। ভিআর রোবট প্রত্যাশিত আচরণগুলি সম্পূর্ণ করে কিনা দেখুন।
- যদি VR রোবট একটি নীল বর্গক্ষেত্র আঁকে না, তবে পূর্ববর্তী ধাপটি পুনরাবৃত্তি করুন এবং আবার চেষ্টা করুন। যতক্ষণ না VR রোবট একটি নীল বর্গক্ষেত্র আঁকেন ততক্ষণ পর্যন্ত আপনার প্রকল্পটি সংশোধন এবং চালাতে থাকুন।
- একবার VR রোবট সফলভাবে আর্ট ক্যানভাস খেলার মাঠএ একটি নীল বর্গক্ষেত্র আঁকে, প্রকল্পটি সংরক্ষণ করুন।
অভিনন্দন! আপনি মিনি চ্যালেঞ্জ সমাধান করেছেন!