
Tantangan Strike - C++
Tantangan Serangan
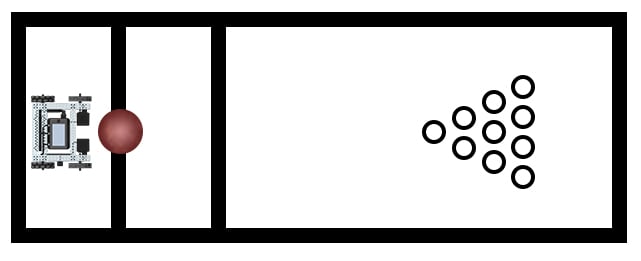
Dalam tantangan ini, Anda akan memprogram robot Anda untuk mentransfer energi ke bola saat Anda berkompetisi dalam bowling!
Aturan tantangan:
- Robot harus memulai di Zona Mulai Robot.
- Bola harus dimulai di mana saja pada Garis Penempatan Bola.
- Robot hanya dapat menyentuh bola ketika bola:
- Di garis penempatan bola
- Di zona tabrakan
- Setiap permainan terdiri dari 10 frame dan mengikuti aturan bowling standar (Google / .docx / .pdf).
- Orang atau tim yang mengumpulkan poin terbanyak di akhir 10 frame menang!
- Selamat bersenang-senang!
 Tips Guru
Tips Guru
Jadilah kreatif dan tingkatkan keterlibatan dengan menyusun cerita latar atau tujuan untuk kegiatan ini! Bowling saat ini sedang dipertimbangkan untuk ditambahkan sebagai cabang olahraga Olimpiade. Apakah para siswa tersebut sedang mempersiapkan diri untuk menjadi bagian dari tim Olimpiade, berlatih untuk kompetisi bowling nasional, atau apakah mereka berharap untuk melamar beasiswa bowling perguruan tinggi?
Klik di sini (Google /.pdf) untuk Lembar Skor Tantangan Serangan opsional.
 Kotak Alat Guru
-
Solusi
Kotak Alat Guru
-
Solusi
Solusi akan bervariasi tergantung pada kecepatan yang ditetapkan. Siswa harus menemukan keseimbangan antara memilih kecepatan yang lebih tinggi untuk mendorong bola lebih keras tetapi juga tidak kehilangan kendali.
Lihat contoh solusi di bawah ini:
int main() {
// Menginisialisasi Konfigurasi Robot. JANGAN DIHAPUS!
vexcodeInit();
// Mulai kode proyek
// Atur kecepatan berkendara ke 50%
Drivetrain.setDriveVelocity(50, persen);
// Berkendara maju sejauh 50 cm
Drivetrain.driveFor(maju, 500, mm);
}