
Exploring Velocity - Python
![]() Teacher Toolbox
Teacher Toolbox
-
Activity Outline
This exploration will first introduce students to setting the velocity for driving and then ask them to explore how the velocity of the robot affects its momentum. Click here (Google / .docx / .pdf) for the outline of this activity. Understanding the momentum of the robot will be an important concept to apply to the Strike Challenge bowling game. -
What the Students will Program
Using the Speedbot (Drivetrain 2-motor, No Gyro) template project allows the students to change the velocity settings of the Speedbot simply by adding set_drive_velocity to the drive_for instruction. The guided part of the activity has students moving the Speedbot at different velocities and the end of the activity asks them to apply their skills for programming velocity to tests of momentum and energy transfer.
Speedbot is ready to drive at different velocities!
This investigation will help you to learn more about programming the Speedbot to drive at speeds that are best suited for the task. In the Strike Challenge at the end, you will need to find a velocity for the Speedbot that allows it to be fast and have great momentum but remain in control in order to hit the ball at a good angle and with great force.
![]() Teacher Toolbox
Teacher Toolbox
Here is an overview of the User Interface of VEXcode V5. Students will be introduced to these tabs/buttons during the activities in this Momentum Alley STEM Lab. Links are also provided throughout the STEM Lab to provide more information about these tabs/buttons. 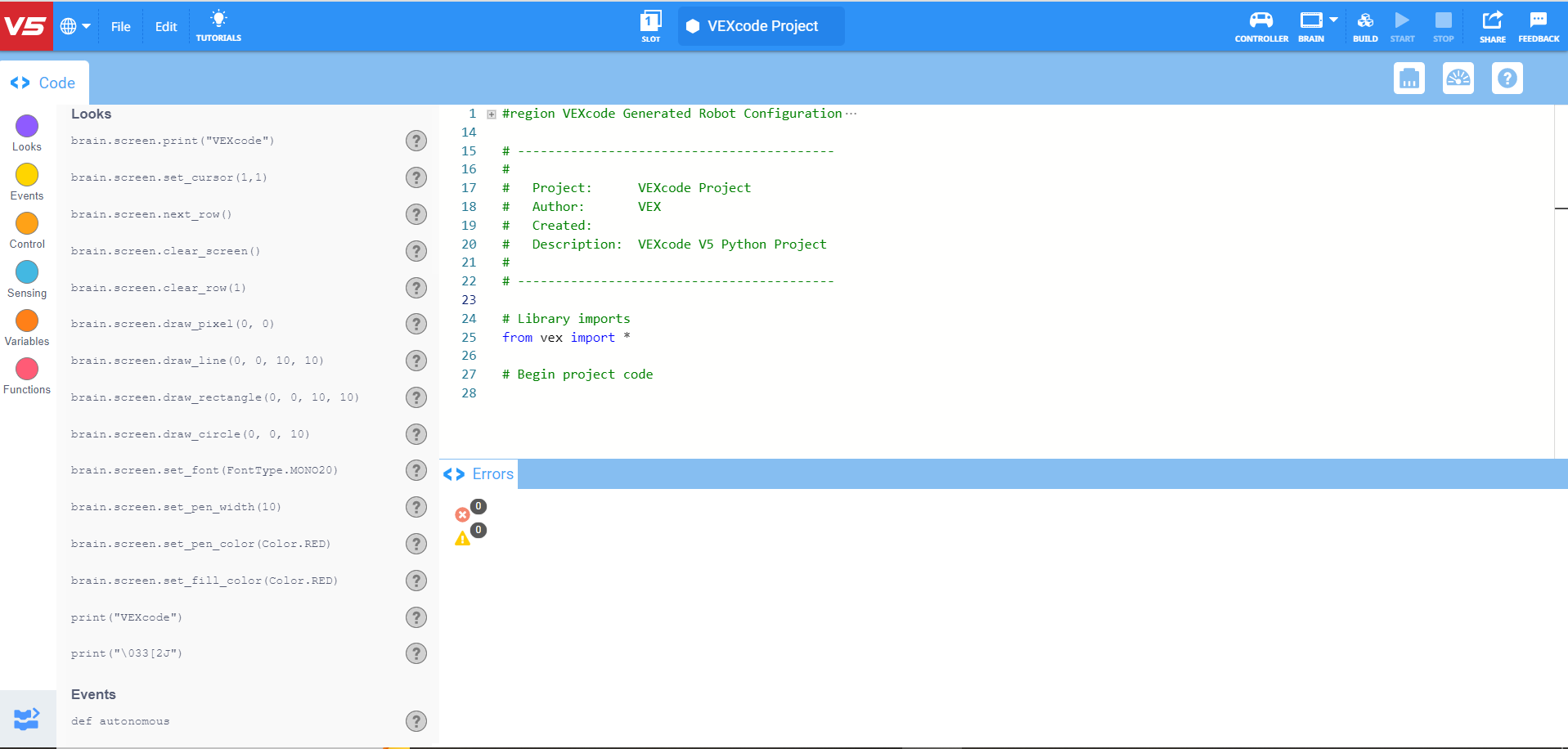
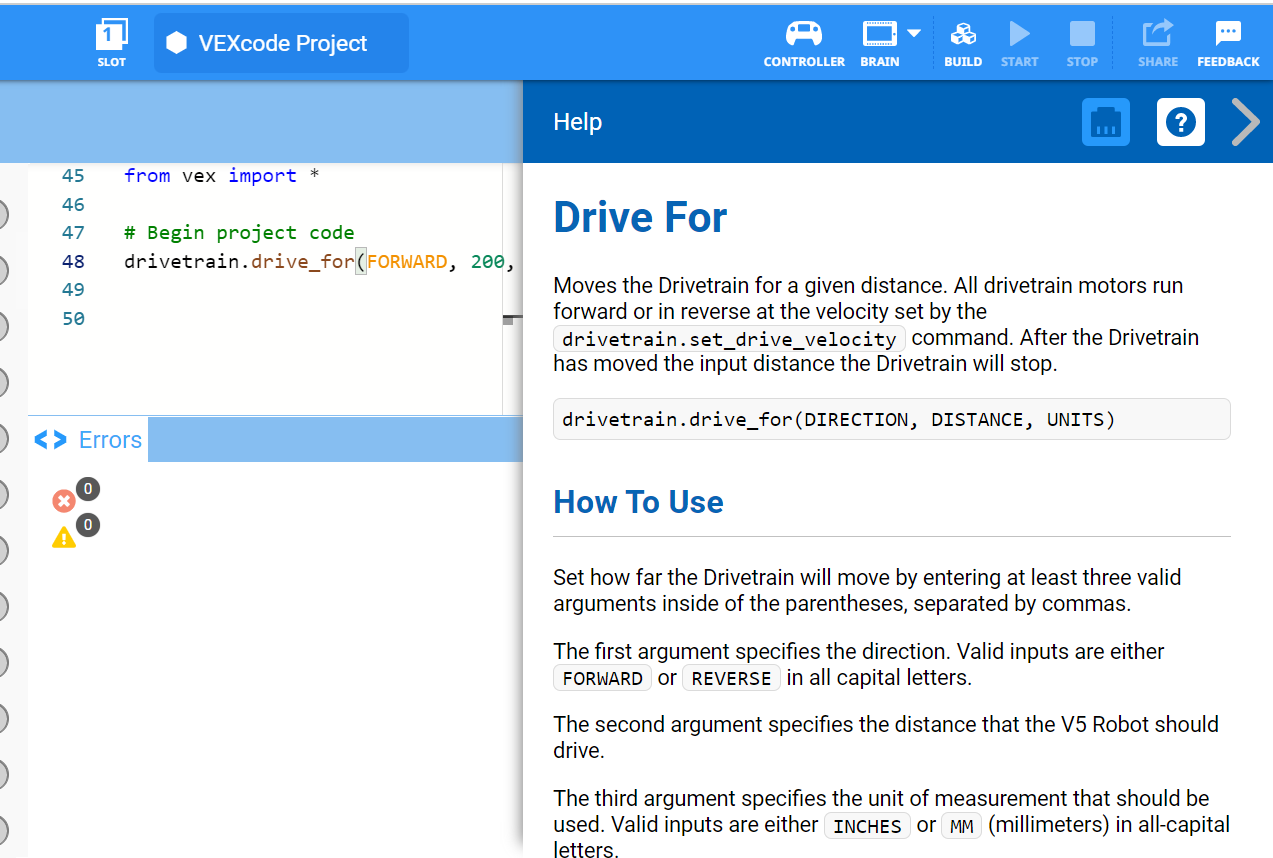
VEXcode V5 Python instructions that will be used in the first part of this investigation:
- drivetrain.set_drive_velocity(50, PERCENT)
- drivetrain.drive_for(FORWARD, 200, MM)
-
To find out more information about an instruction, select Help and then select the question mark icon next to an instruction to see more information.
Make sure you have the hardware required, your engineering notebook, and VEXcode V5 downloaded and ready.
![]() Teacher Tips
Teacher Tips
If this is the student's first time using VEXcode V5, they can reference the Tutorials at any time during this exploration. The Tutorials are located in the Toolbar. 
Each group of students should get the hardware required and the group's engineering notebook. Then open VEXcode V5.
| Quantity | Materials Needed |
|---|---|
| 1 |
Speedbot Robot |
| 1 |
Charged Robot Battery |
| 1 |
VEXcode V5 |
| 1 |
USB Cable (if using a computer) |
| 1 |
Engineering Notebook |
| 1 |
Ball (the size and shape of a soccer ball) |
| 1 |
3m x 3m clear space |
| 1 |
Meter stick or Ruler |
| 1 |
Roll of tape |
| 1 |
![]() Teacher Tips
Teacher Tips
Model each of the troubleshooting steps for the students.
Step 2: Start a New Project
Complete the following steps to begin the project:
-
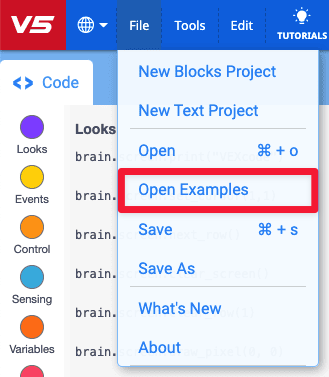
Open the File menu and select Open Examples.
-
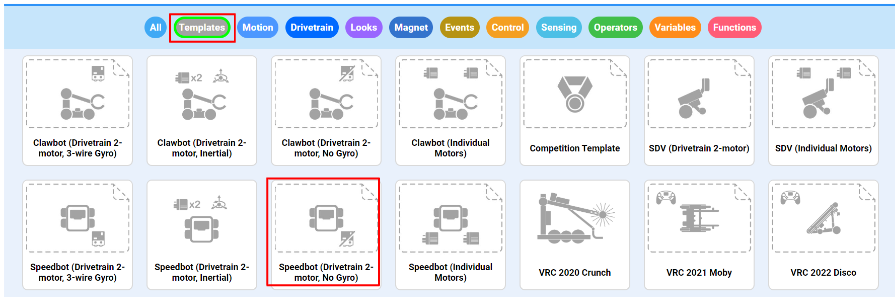
Select and open the Speedbot (Drivetrain 2-motor, No Gyro) template project. The template project contains the Speedbot's motor configuration. If the template is not used, your robot will not run the project correctly.
-
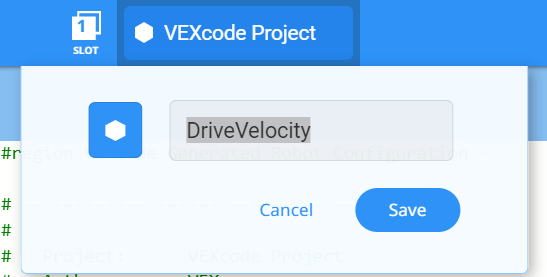
Since you will be working on exploring velocity, you will name your project DriveVelocity. When finished, select Save.
![]() Teacher Tips
Teacher Tips
-
Project Names can have spaces between or after the words.

- You can ask students to add their initials or the name of their group to the project name. This will help differentiate the projects if you ask the students to submit them.
- Because this is the first activity with programming your students may attempt, you should model the steps, and then ask students to complete the same actions. The teacher should then monitor the students to ensure that they are following the steps correctly.
- Make sure that the students have selected Open Examples from the File menu.
- Make sure that the students have selected the Speedbot (Drivetrain 2-motor, No Gyro) template project.
- You can point out to the students that there are several selections to pick from on the Examples page. As they build and use other robots, they will have a chance to use different templates.
- Check to make sure the project name DriveVelocity is now in the window in the center of the Toolbar.

![]() Teacher Toolbox
-
Saving Projects
Teacher Toolbox
-
Saving Projects
-
Point out that when they first opened VEXcode V5, the window was labeled VEXcode Project. VEXcode Project is the default project name when VEXcode V5 is first opened. Once the project was renamed Drive and saved, the display was updated to show the new project name. Using this window in the toolbar, it is easy to check that the students are using the correct project.
-
Tell the students that they are now ready to begin their first project. Explain to the students that by just following a few simple steps, they will be able to create and run a project that will move the Speedbot forward.
-
Remind students to save their projects as they work. The Python section from the VEX Library explains saving practices in VEXcode V5.
![]() Teacher Toolbox
-
Stop and Discuss
Teacher Toolbox
-
Stop and Discuss
This is a good point to pause and have the students review the steps that were just completed on starting a new project in VEXcode V5 individually or in groups. Ask the students to reflect individually before sharing within their group or to the whole class.
Step 3: Drive Forward for 150 mm at Different Velocities
You are not ready to begin programming the robot to drive forward at different velocities!
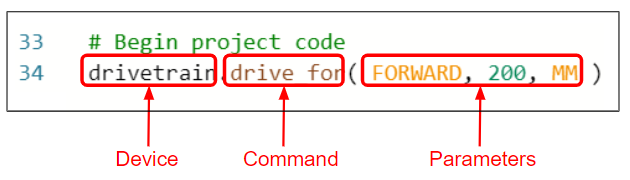
- Before we begin programming, we need to understand what an instruction is. There are three parts to an instruction.
-
Add the instructions to the project, so that your project looks like this:
# Library imports from vex import * # Begin project code drivetrain.drive_for(FORWARD, 150, MM) drivetrain.set_drive_velocity(25, PERCENT) drivetrain.drive_for(FORWARD, 150, MM) drivetrain.set_drive_velocity(75, PERCENT) drivetrain.drive_for(FORWARD, 150, MM)
![]() Teacher Tips
Teacher Tips
Notice that the second and third instructions (Lines 33 and 34 in the image above) are the same as the fourth and fifth instructions (Lines 35 and 36 above), but with a different velocity parameter. After adding the third instructions, students can highlight the lines to be repeated and copy and paste them to complete the project. They can then change the velocity in the fourth line to 75 percent.
-
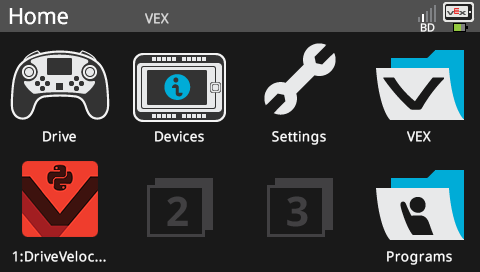
Select the Slot icon to choose one of the eight available slots on the Robot Brain and select slot 1.

-
Connect the V5 Robot Brain to the computer using a micro USB cable and power on the V5 Robot Brain. The Brain icon in the toolbar turns green once a successful connection has been made.

-
Select Download to download the project to the Brain.

![]() Teacher Toolbox
Teacher Toolbox
- Remind the students to disconnect the USB cable from the Robot Brain. Having the robot connected to a computer while running a project could cause the robot to pull on the connection cable.
-
Check to make sure your project has downloaded (Python) by looking at the Robot Brain’s screen. The project name DriveVelocity should be listed in Slot 1.
![]() Teacher Toolbox
Teacher Toolbox
-
Stop and Discuss
Ask the students to predict what they think will happen when this project is downloaded and run on the Speedbot robot. Tell the students to record their predictions in their engineering notebooks. If time allows, ask each group to share their prediction.Students should predict that the Speedbot will first move forward at its default velocity (50%), then slower (25%) than the default velocity, and then faster (75%) than the default velocity.
-
Model First
Model running the project in front of the class before having all the students try at once. Gather the students in one area and leave enough room for the Speedbot to move if it is placed on the floor.Tell the students it is now their turn to run their project. Make sure that they have a clear path and that no Speedbots will run into each other.
-
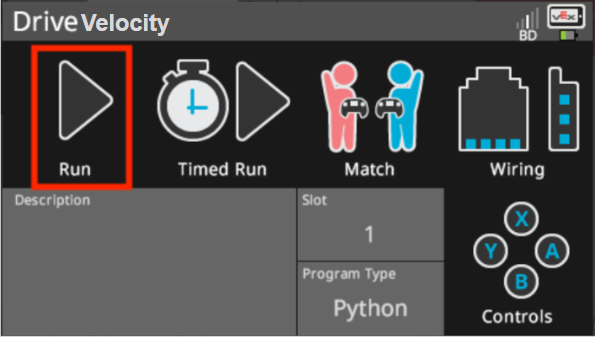
Run (Python) the project on the robot by making sure the project is selected and then press the Run button on the Robot Brain. Congratulations on creating your first project!
Step 4: Drive Forward and Reverse for 150 mm at Different Velocities
Now that you have programmed your robot to drive forward at different velocities, program it to now drive forward and in reverse at different velocities.
-
Change the parameter in the second drive_for instruction to REVERSE, so your project looks like this:
# Library imports from vex import * # Begin project code drivetrain.drive_for(FORWARD, 150, MM) drivetrain.set_drive_velocity(25, PERCENT) drivetrain.drive_for(REVERSE, 150, MM) drivetrain.set_drive_velocity(75, PERCENT) drivetrain.drive_for(FORWARD, 150, MM) -
Select the Project Name to change it from DriveVelocity to ReverseVelocity.

-
Select the Slot icon to choose a new slot. Select slot 2.
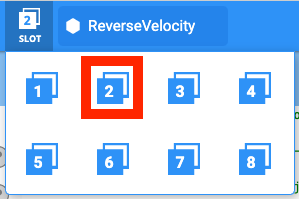
-
Download (Python) the project.

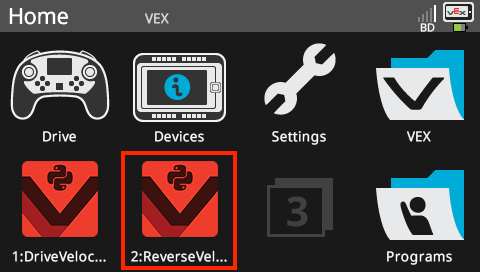
-
Check to make sure your project has downloaded (Python) by looking at the Robot Brain’s screen. The project name ReverseVelocity should be listed in Slot 2.
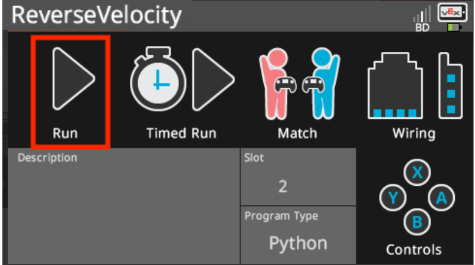
-
Run (Python) the project on the robot by making sure the project is selected and then press the Run button on the Robot Brain.
![]() Teacher Toolbox
-
Completing Step 4
Teacher Toolbox
-
Completing Step 4
-
To change the drive_for command from forward to reverse, simply change the first parameter to REVERSE. This will have the motors in the drivetrain move in the opposite direction.
-
The number of mm can be changed, but for this example we will leave them at 150 mm as set in the previous step.
-
Remind students to disconnect the USB cable from the Robot Brain before running the project.
-
Remind students to save their projects as they work. The VEX Library has a section for Python that explains saving practices in VEXcode V5.
![]() Teacher Tips
Teacher Tips
Ask teams to share the testing area and ball if necessary, but multiple testing areas each with their own ball could also be set up. Decide whether you want to set the testing area(s) up, or if you want students to do so.
Step 5: Setting Up Your Testing Area
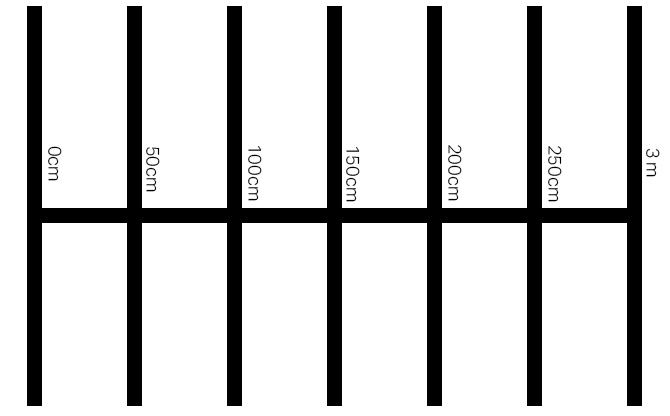
- Use tape and a meter stick to create a 3m line on the floor like the horizontal line shown in the image above.
- After the line is created, use tape and your meter stick once more to create 1m lines across the 3m line like the vertical lines in the image above. Tape a 1m line at every 50cm mark on the vertical line by starting at 0cm.
- The shorter horizontal lines should be centered on the longer vertical line.
- While the area is being set up, one or two members of your team should create a new project named Momentum. Set the velocity at 50% and have the Speedbot drive forward to the first line at 50 cm. Keep in mind 1 cm = 10 mm, so the robot will travel forward for 50 cm or 500 millimeters.
![]() Teacher Toolbox
-
Why this activity?
Teacher Toolbox
-
Why this activity?
-
Data collection and analysis, even simple pattern recognition, are fundamental science skills. This activity adds structure to that data analysis by preventing common missteps.
-
Notice that the instructions do not tell students to vary the driving distance of the robot along with varying the velocity of the robot. This is an intentional application of what learning scientists call the Control of Variables Strategy. Teaching novice investigators to manipulate one variable at a time (i.e., the velocity in this case) to determine its influence on a second variable (i.e., the distance the ball travels after collision) is important because it is not necessarily an approach students will adopt spontaneously over a guess-and-check approach. Typical guess-and-check approaches often manipulate more than one variable at a time (i.e., changing both the velocity and the distance the robot travels) and observing the confluence's impact on the distance the ball travels after rotation. This activity tries to guide students away from that because the relationships between the variables are then ambiguous. Is it the higher velocity of the robot, the farther distance the robot drives, or both that lead the ball to travel farther? We can't answer that when we manipulate both variables at the same time.
-
However, teams might spontaneously try driving the robot different distances. If you observe this, ask them only to change the distance but keep the velocity the same as it was in a trial with the original 500mm distance. That way, they can compare the same velocity with different driving distances to see if the robot's driving distance also factors into how far the ball travels.
Step 6: Testing the Transfer of Energy during Collisions

Bowling challenge test area with robot and ball
Center the ball on the horizontal line at 50cm and place your robot so that the front of it is centered on the horizontal line at 0cm. Make sure the front of the robot is facing the direction of the ball. Run your first Momentum project that has the velocity set to 50% and pay close attention as the robot collides with the ball.
Record the set velocity, the distance driven, and the distance the ball traveled in this Data Table (Google / .pdf). The first row of the table has been started for you based on the Momentum project you worked on in the previous step. Continue to add data to this table as you try setting different velocities. You can then add other teams' data as you discuss your findings as a class.
![]() Teacher Tips
Teacher Tips
-
Prepare the area for the ball to bounce in varying directions for varying distances. Close doors and/or windows as needed.
-
The table for Exploring Velocity can be saved from below, or students can recreate the table in their engineering notebooks.
-
A rubric for evaluating team engineering notebooks can be found here (Google / .docx / .pdf), and a rubric for evaluating individual notebooks can be found here (Google / .docx / .pdf). Whenever you plan to evaluate student work with a rubric(s), be sure to share the rubric with them before they begin to work on the project.

Think about and respond to the questions below in your engineering notebook as you collect your data:
- How can you tell that the momentum of the robot transferred energy to the ball during the collision? Explain with details.
- Repeat the test at least twice more. Try a velocity less than 50%. Reset the ball in its position and record in the table how far the ball travels. Also, try a velocity more than 50%. Reset the ball in its position and record in the table how far the ball travels.
- When all groups have completed their three tests, discuss the velocities that the other groups chose and how far the ball traveled in their tests. As teams share their data, add their findings to your table.
- Look for pattern(s) in the data. Does the distance traveled by the ball increase or decrease as the set velocity increases?
![]() Teacher Toolbox
-
Answers
Teacher Toolbox
-
Answers
-
The movement of the ball is evidence that the robot transferred energy during the collision. Students might also describe the speed of the ball after impact or its direction of travel as evidence.
-
The distance that the ball travels depends on the mass/weight of the ball used and the velocity set for the robot.
-
Students should recognize that higher velocities lead the ball to travel farther than lower velocities. Explicitly connect this to the momentum of the robot. Highlight that the weight of the robot has not changed, only its velocity, but that both contribute to the robot's momentum. Ask them if they think the ball would travel as far if the robot was heavier. It presumably would. There is more about the effects of the mass of the ball during the collision in the next reading.
-
Student groups might have selected widely variable velocities but the overall learning objective is for students to recognize that higher velocities lead to greater momentum which transfers more energy to the ball during collisions.