
Strike Challenge - C++
Stakingsuitdaging
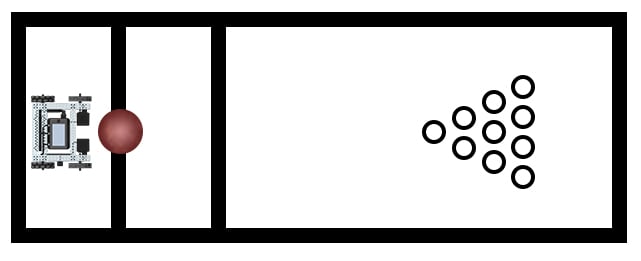
In deze uitdaging programmeer je je robot om energie over te brengen op een bal terwijl je meedoet aan een potje bowlen!
Uitdagingsregels:
- De robot moet beginnen in de Robot Start Zone.
- De bal moet ergens op de balplaatsingslijn beginnen.
- De robot kan de bal alleen raken als de bal:
- Op de balplaatsingslijn
- In de botsingszone
- Elk spel bestaat uit 10 frames en volgt de standaard bowlingregels (Google / .docx / .pdf).
- De persoon of het team met de meeste punten aan het einde van de 10 frames wint!
- Veel plezier!
![]() Tips voor leraren
Tips voor leraren
Wees creatief en vergroot de betrokkenheid door een achtergrondverhaal of doel voor deze activiteit te bedenken! Er wordt momenteel overwogen om bowlen toe te voegen aan de Olympische sport. Bereiden de studenten zich voor op deelname aan een Olympisch team, trainen ze voor een nationale bowlingcompetitie of hopen ze een beurs voor een universitaire bowlingopleiding aan te vragen?
Klik hier (Google /.pdf) voor een optioneel Strike Challenge Score Sheet.
![]() Teacher Toolbox
-
Oplossing
Teacher Toolbox
-
Oplossing
Oplossingen variëren afhankelijk van de ingestelde snelheid. Studenten moeten een balans vinden tussen het kiezen van een hogere snelheid om de bal harder te duwen, maar ook om de controle niet te verliezen.
Bekijk hieronder de voorbeeldoplossingen:
int main() {
// Robotconfiguratie initialiseren. NIET VERWIJDEREN!
vexcodeInit();
// Begin projectcode
// Stel de aandrijfsnelheid in op 50%
Drivetrain.setDriveVelocity(50, percent);
// Rijd 50 cm vooruit
Drivetrain.driveFor(forward, 500, mm);
}