
Using the Vision Sensor
![]() Teacher Toolbox
-
The Purpose of this Activity
Teacher Toolbox
-
The Purpose of this Activity
Using the Vision Sensor effectively requires the students to be able to configure it and tune it depending on the environment that it is in. In the following activity, the students will learn how to do both.
For more information about programming the Vision Sensor with sensing blocks, visit the help information within VEXcode IQ.
The following is an outline of what your students will do in this activity:
-
Open the Detecting Objects example project.
-
Watch the Configuring the Vision Sensor tutorial video.
-
Configure the Vision Sensor.
-
Run the Detecting Objects example project.
-
Discuss and Reflect.
-
Watch the Tuning the Vision Sensor tutorial video.
-
Tune the Vision Sensor.
For help organizing students for this activity click here.
![]() Teacher Tips
Teacher Tips
If this is the student's first time using VEXcode IQ, they can also see the Tutorials in the toolbar to learn other basic skills.

The Builder in each group should get the hardware required. The Recorder should get the group’s engineering notebook. The Programmer should open VEXcode IQ.
| Quantity | Materials Needed |
|---|---|
| 1 |
VEX IQ Super Kit |
| 1 |
VEXcode IQ |
| 1 |
Engineering Notebook |
| 1 |
Configuring the Vision Sensor (Tutorial) |
| 1 |
Tuning the Vision Sensor (Tutorial) |
| 1 |
Detecting Objects example project |
This activity will give you the tools to use the Vision Sensor.
You can use the Help information inside of VEXcode IQ learn about the blocks. For guidance in using the Help feature, see the Using Help tutorial.

![]() Teacher Tips
Teacher Tips
Model each of the troubleshooting steps for the students. Remind the students they each group has someone in the role of the builder. That person should be checking these items throughout the activity.
Step 1: Preparing for the activity
Before you begin the activity, do you have each of these items ready? The Builder should check each of the following:
-
Are all the motors and sensors plugged into the correct port?
-
Are the smart cables fully inserted into all of the motors and sensors?
-
Is the Brain turned on?
-
Is the battery charged?
![]() Teacher Tips
Teacher Tips
-
Make sure that the students have selected the Open Examples from the File menu.
-
Make sure that the students have selected the Detecting Objects Example project. You can point out to students that there are several selections to choose from on the Open Examples page. Remind students that they can refer to the Using Examples and Templates tutorial at any time.
-
You can ask students to add their initials or the name of their group to the project name. This will help differentiate the programs if you ask the students to submit them.
-
Since VEXcode IQ has autosave, there is no need to save the project again after it has been saved for the first time.
-
If students need help saving, direct them to the Naming and Saving Your Project tutorial video.
Step 2: Open an Example Project.
-
VEXcode IQ contains many different example projects. You’ll use one of them in this exploration. For help and tips on using example projects, check out the Using Examples and Templates tutorial.
Then, open the Detecting Objects example project.

The Programmer should complete the following steps:
- Open the File menu.
- Select Open Examples.
-
Use the filter bar at the top of the application and select "Sensing."
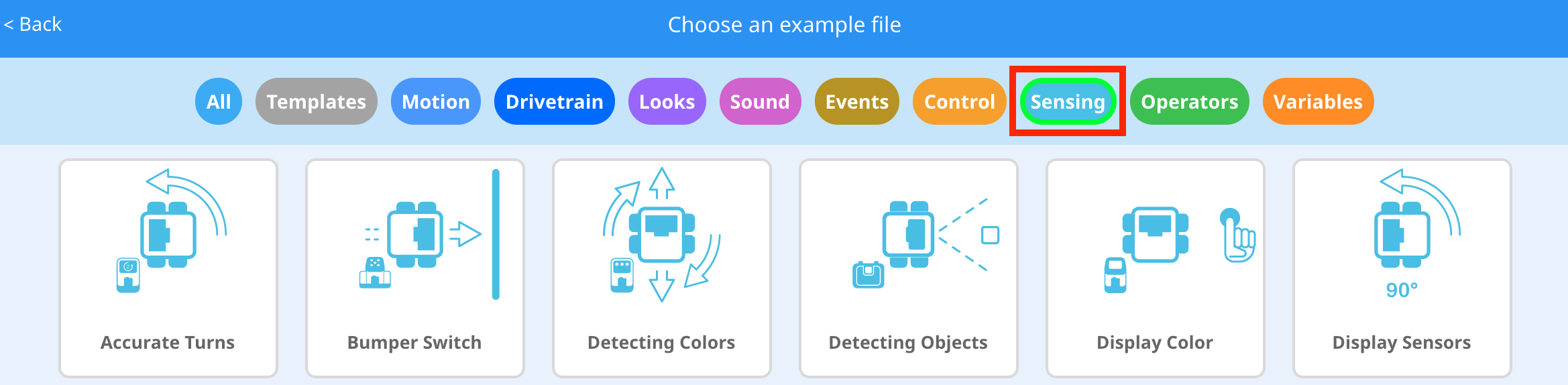
-
Select and open the Detecting Objects example project.
-
Save your project as Detecting Objects.

- Check to make sure the project name Detecting Objects is now in the window in the center of the toolbar.
-
For addition help, view the Use Example Projects and Templates tutorial video.

![]() Teacher Tips
Teacher Tips
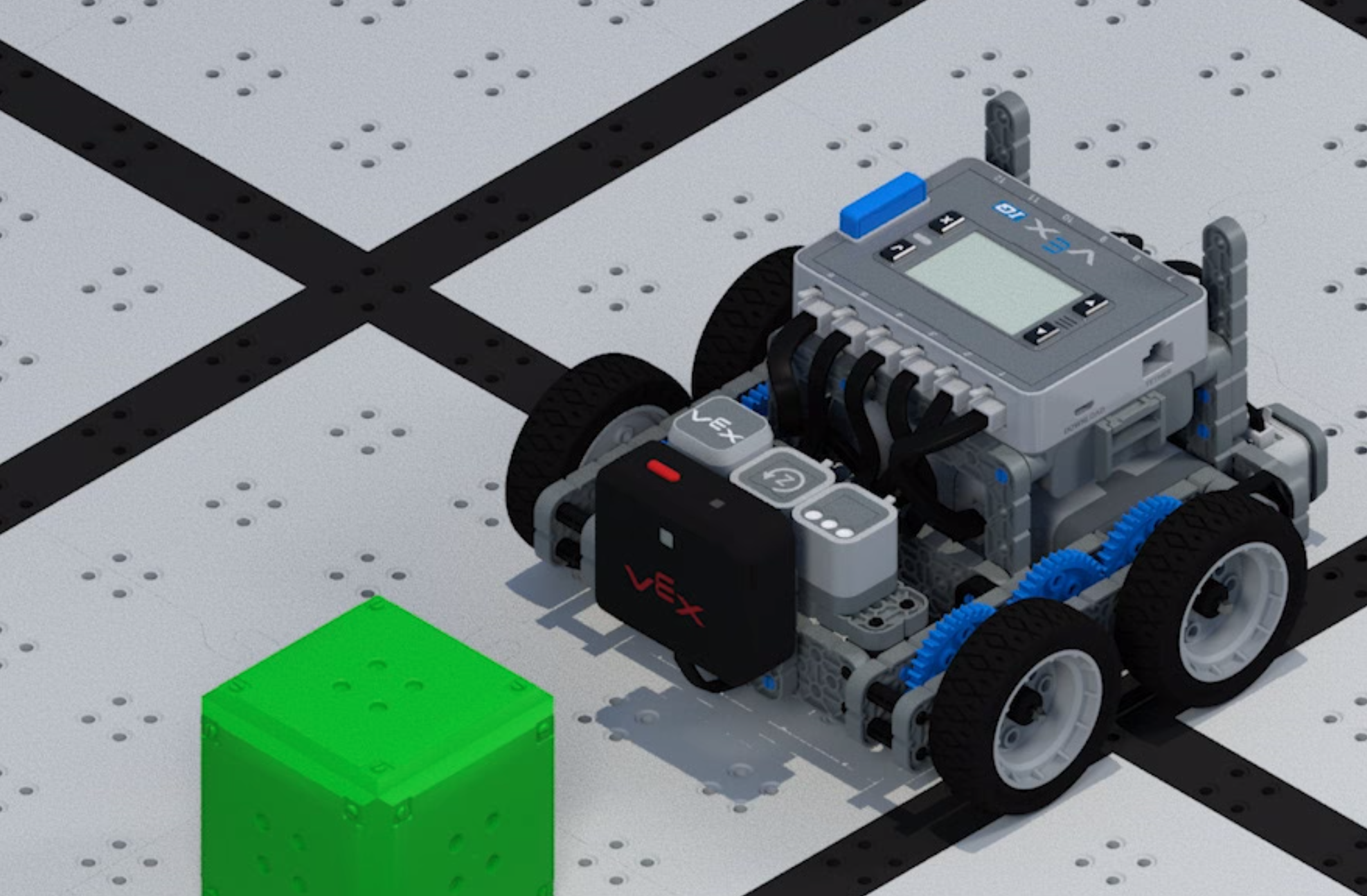
The three colored objects do not have to be cubes, they can be any relatively small green, red, and blue object.
Step 3: Configuring and Using the Vision Sensor
- Begin by watching the Configuring the Vision Sensor tutorial video.
-
Next, configure the Vision Sensor for three colored objects: red, green, and blue.
-
Have the Programmer open the previously saved Detecting Objects example project.
-
What is this project actually doing? Predict what the Autopilot will do and have the Recorder write down the predictions in your engineering notebook.
-
Have the Driver Download and Run the project. Have the Builder place different colored objects in front of the Vision Sensor and observe the robot's behavior. Have the Recorder record in your engineering notebook how your prediction was different or correct compared to what you actually observed from the project.
For additional help, view the Download and Run a Project tutorial video.
![]() Teacher Toolbox
-
Answers
Teacher Toolbox
-
Answers
Facilitate a classroom discussion to have the students share what they predicted this project will do in their engineering notebook and also reflect on how to configure the Vision Sensor.
Facilitate the discussion by asking the following questions:
-
What are the steps for configuring the Vision Sensor?
-
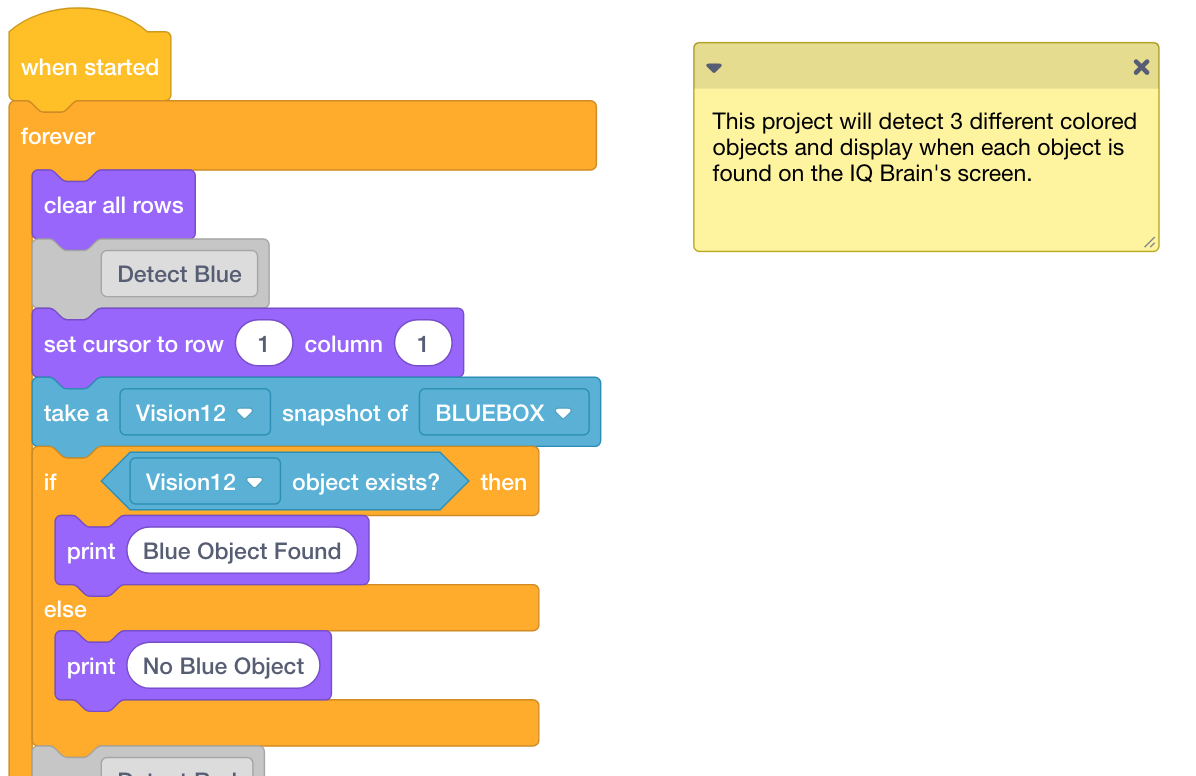
What does the Object exists block do?
-
What does the if/then/else block do?
-
What would happen to how the Vision Sensor detects objects if we changed rooms?
Answers will vary:
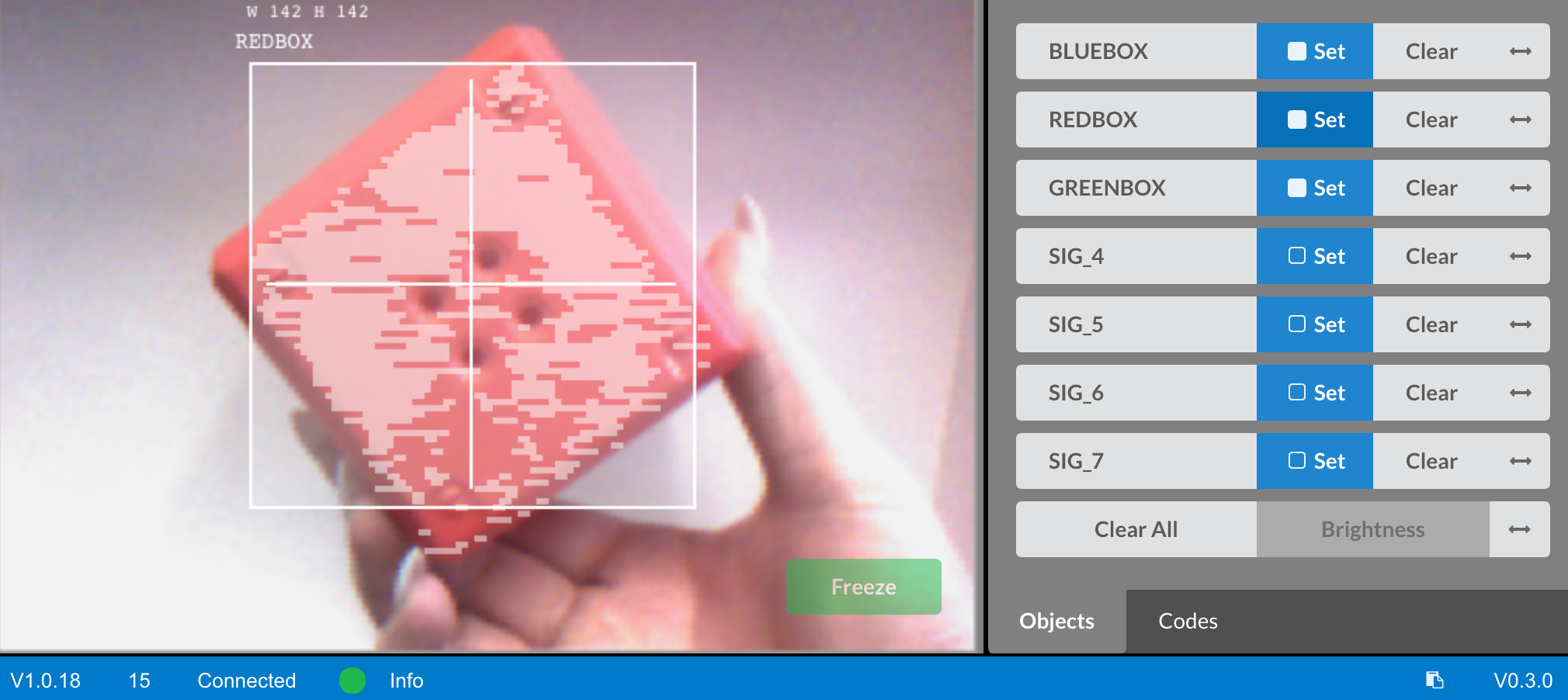
-
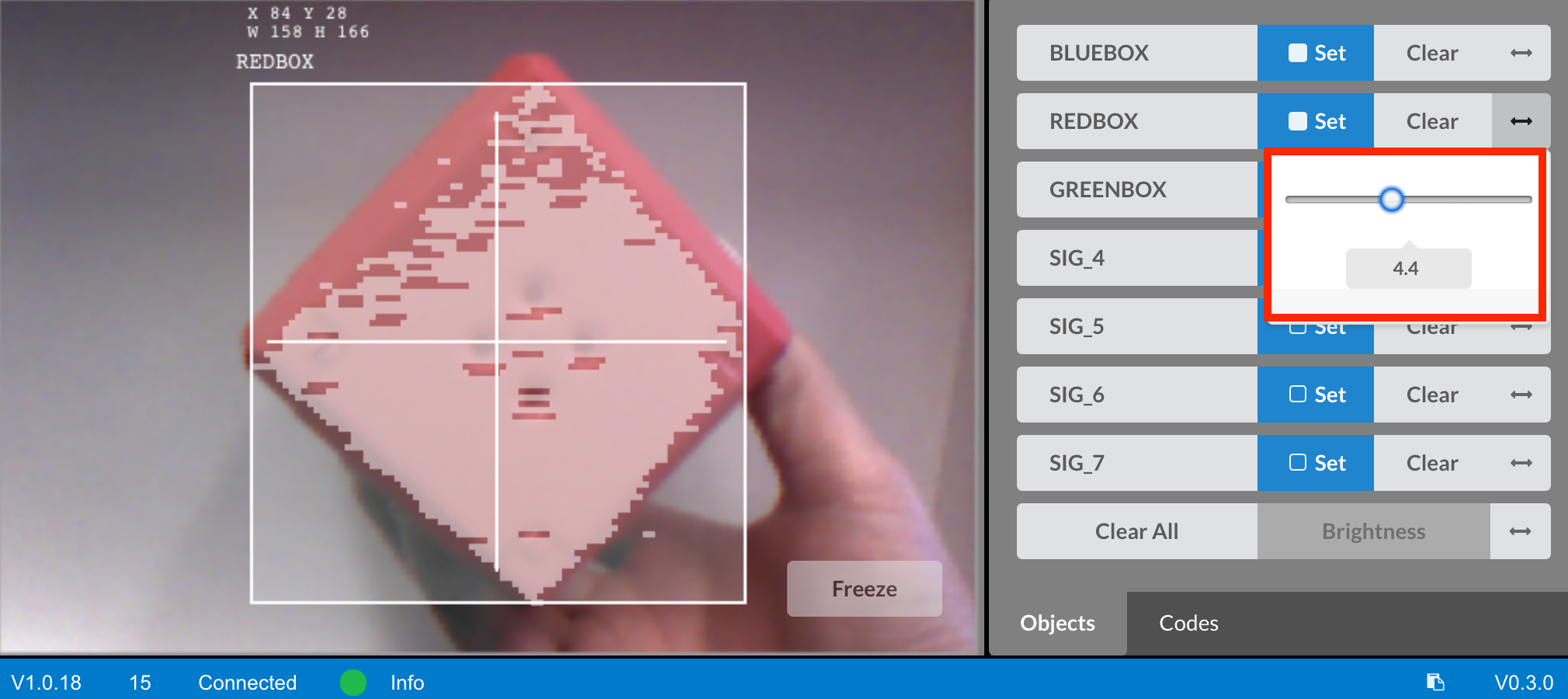
The students should note that the object name will have to be decided. The object should be placed in the frame of the Vision Sensor and stilled using the "Freeze" button. The color will then be selected and configured using the "Set" button. The students should outline the steps listed in this article as well as the steps listed in the Configuring the Vision Sensor tutorial video.
-
The Object exists block reports if the Vision Sensor detects a configured object. More information on how to use this block can be found in the Help information.
-
The if-then-else block runs the blocks inside the first or second parts of the if then else based on the Boolean value reported. More information on how to use this block can be found in the Help information.
-
If the Vision Sensor was asked to detect objects in a different environment, the lighting could change and the colors of the objects could look different. This may make it difficult for the Vision Sensor to detect objects.
![]() Extend Your Learning
-
Configure More Objects
Extend Your Learning
-
Configure More Objects
Choose two other colored objects to configure, possibly white, purple, yellow, etc...

If the students need help with configuring, refer them to the Help information or tutorial.
Step 4: Tuning the Vision Sensor
Often times an object is configured to be recognized by the Vision Sensor in one environment, for example, in a classroom. When the Vision Sensor is then taken into a different environment such as a competition setting, the object may not be recognized by the Vision Sensor. This is often due to a change in lighting after the Vision Sensor has already been configured. To solve this problem, you may have to tune your Vision Sensor.
- Begin by watching the Tuning the Vision Sensor tutorial video.
-
Next, Tune the Vision Sensor for the three colored objects: red, green, and blue.
-
Have the Programmer open the previously saved Detecting Objects example project.
-
How will tuning the Vision Sensor affect how well it can detect objects? Have the Builder take the Autopilot to a different part of the room with more or less light.
-
Have the Driver Download and Run the project. Have the Builder place different colored objects in front of the Vision Sensor and observe the robot's behavior. Have the Recorder document in your engineering notebook how well the Vision Sensor detects objects. Does the Vision Sensor need tuned after it changed locations?
For additional help, view the Download and Run a Project tutorial video. - Tune the Vision Sensor as necessary. Test the Vision Sensor after it has been tuned to determine if it can detect objects better and make adjustments as needed.
![]() Motivate Discussion
-
Reflecting on the Activity
Motivate Discussion
-
Reflecting on the Activity
Q: Did the Vision Sensor detect objects as you expected it to?
A: Answers will vary; however, the goal of this question is to promote cognitive thinking. Students should note that the Vision Sensor's ability to detect objects can change depending on the environment and light.
Q: Why is it important to be able to tune the Vision Sensor as needed?
A: While answers may vary, a common response should be that if a robot uses a Vision Sensor and is taken to a competition or even used in a game or challenge, how well the robot performs will depend on the accuracy of the Vision Sensor. Tuning it is important for accuracy.
![]() Extend Your Learning
-
Multiple Objects
Extend Your Learning
-
Multiple Objects
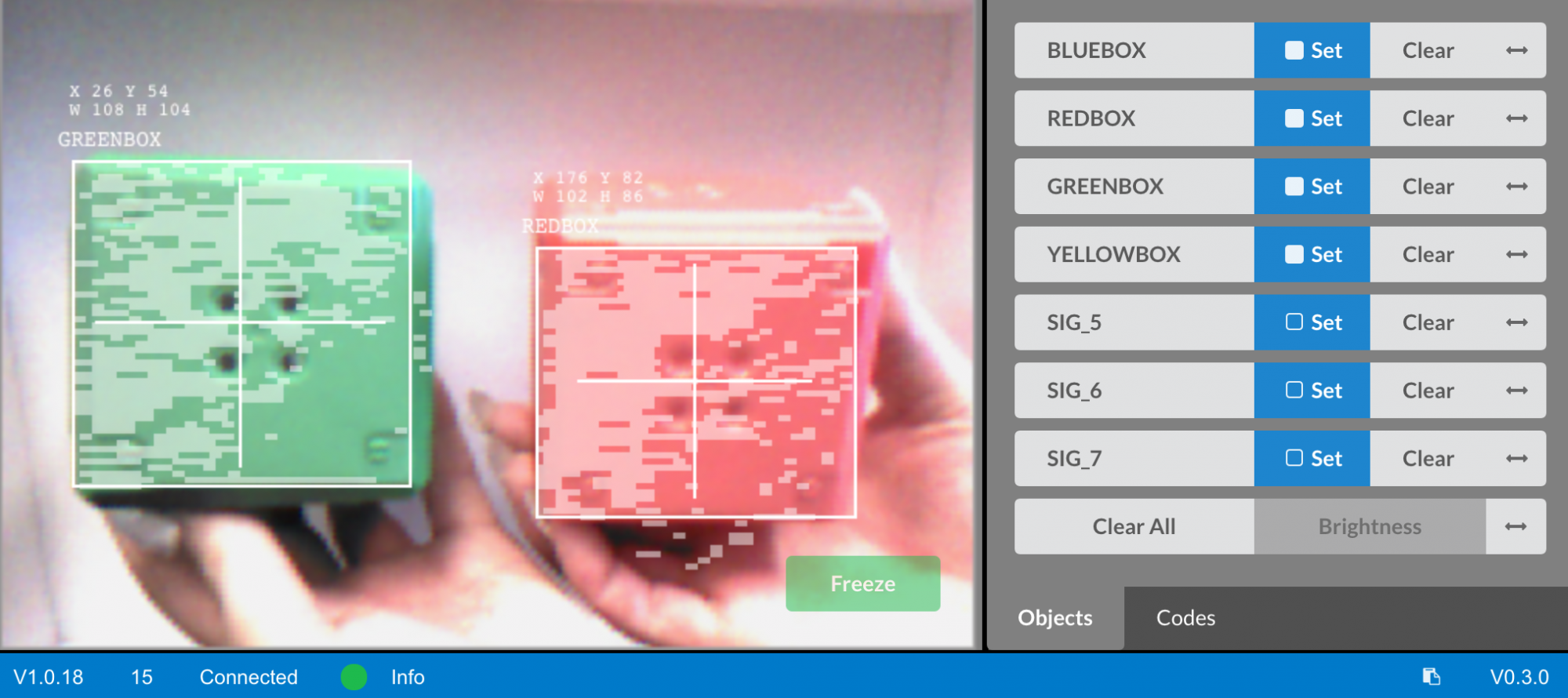
Ask the students to run the Detecting Objects project and place more than one of the configured objects in front of the Vision Sensor. What happens? Ask them to document their findings in their engineering notebook.
Now, ask the students to place one configured object and one unknown or not configured object in front of the Vision Sensor. What happens? Ask them to document their findings in their engineering notebook.
Ask the students before testing it, what would happen if they placed three configured objects in front of the Vision Sensor? Ask the students to write down their predictions before testing it. Ask them to record their observations after testing it.
Facilitate a discussion on what the students predicted and observed.
Facilitate the discussion by asking:
- What were the differences between one, two, and three objects?
- Would you adjust the project in any way for recognizing multiple objects?