
Competition Connection: Crossover
Robot Capabilities
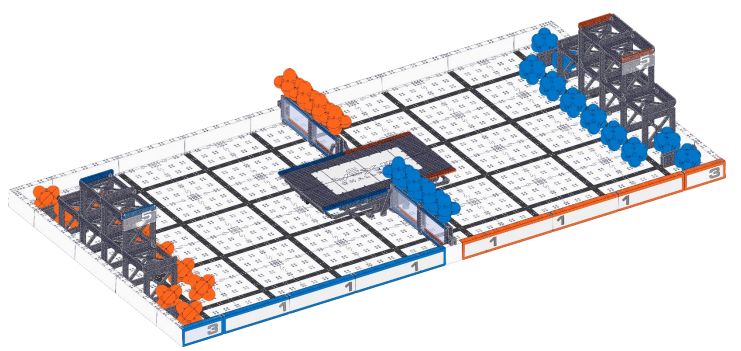
The 2016 - 2017 competition game Crossover required players to place their colored Hexballs in their scoring zones. There were 28 Hexballs in total: 14 of each color (blue and orange) per team. Points were earned by placing the team's correctly colored Hexball in their goal zone.
Although it was illegal to use a Vision Sensor in a VEX IQ Robotics Competition in 2016-2017, you can imagine that competition teams could have benefited from using the Vision Sensor to detect the team-specific colored Hexball. It would be easier for the robot to pick up the correctly colored Hexball during the autonomous period if the robot was programmed to move towards and grab a certain colored object. If the robot selects the incorrect colored Hexball during the autonomous period, there is a possibility that the robot would not score as many points.
Similarly, for the Driving Skills Challenge, it may be hard for teams to manually line up the robot enough to place the Hexball in the goal. The Vision Sensor could be used to align the robot more accurately.
Overall, the Vision Sensor would have greatly helped skilled teams to program the robot to use the Vision Sensor to detect Hexballs and align the robot properly in order to place the Hexballs into the goals.
![]() Extend Your Learning
Extend Your Learning
To expand this activity, ask your students to design and outline a project that they can detect blue and orange objects that they could potentially use for this competition game!
Ask your students to do the following:
- Open the Detecting Objects example project.
- Configure the Vision Sensor to detect orange objects. For help configuring a new object, click here or view the Configuring the Vision Sensor tutorial video.

- Download and Run the project to observe if the robot can detect blue and orange objects. For help, view the Download and Run a Project tutorial video.
- If time allows, setup a game field similar to the Crossover field. Practice using and altering the Detecting Objects project to score points!