
แข่งขัน
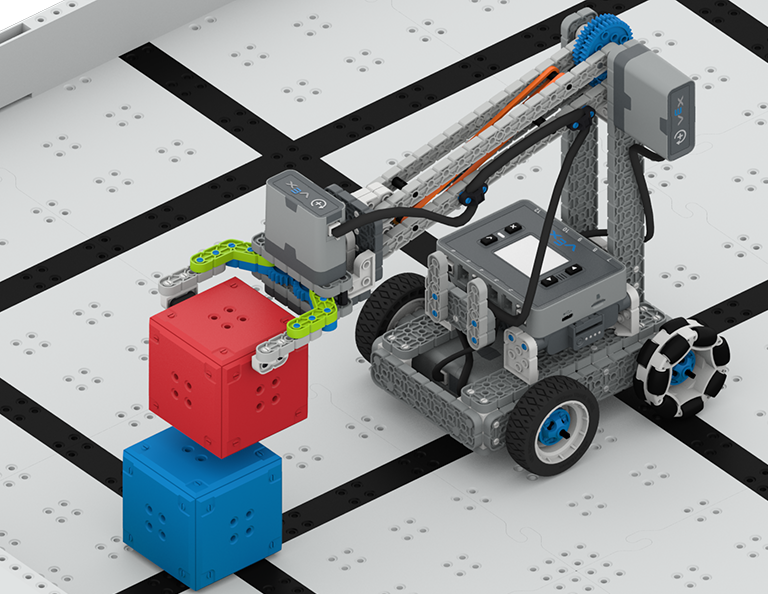
ตอนนี้คุณได้ฝึกการออกแบบกรงเล็บและฝึกหยิบและเคลื่อนย้ายลูกบาศก์ด้วยกรงเล็บแล้ว คุณก็พร้อมที่จะแข่งขันใน Grab and Go Challenge แล้ว! เป้าหมายของความท้าทายนี้คือการย้ายลูกบาศก์สามลูกจากด้านหนึ่งของสนามไปยังอีกด้านหนึ่งในเวลาที่เร็วที่สุด ชมแอนิเมชันด้านล่างเพื่อดูวิธีหนึ่งที่ Clawbot สามารถเคลื่อนไหวเพื่อทำภารกิจให้สำเร็จ
ปฏิบัติตามขั้นตอนในเอกสารนี้เพื่อทำภารกิจ Grab and Go ให้เสร็จสมบูรณ์
เมื่อคุณทำ Grab and Go Challenge เสร็จแล้ว ให้ติดต่อครูของคุณ ให้แน่ใจว่าคุณได้บันทึกผลลัพธ์ของความท้าทายไว้ในสมุดบันทึกวิศวกรรมของคุณแล้ว
สรุปการสะท้อนความคิด
ตอนนี้คุณได้ทำซ้ำการออกแบบกรงเล็บของคุณ และเล่น Grab and Go Challenge แล้ว ได้เวลาทบทวนสิ่งที่คุณได้เรียนรู้และทำในบทเรียนนี้ เริ่มหน้าใหม่ในสมุดบันทึกวิศวกรรมของคุณเพื่อเริ่ม การสะท้อนความคิดของคุณ
ให้คะแนนตัวเองในฐานะ ผู้เริ่มต้น, ผู้ฝึกหัดหรือ ผู้เชี่ยวชาญ ในแต่ละแนวคิดต่อไปนี้ในสมุดบันทึกวิศวกรรมของคุณ ให้คำอธิบายสั้นๆ ว่าเหตุใดคุณจึงให้คะแนนตัวเองเป็น ในแต่ละแนวคิด:
- การออกแบบ การสร้าง และการทำซ้ำในการออกแบบกรงเล็บของคุณ
- การใช้กรงเล็บในการเคลื่อนย้ายลูกบาศก์
- การค้นหาเพื่อตัดสินใจอย่างรอบรู้เกี่ยวกับการออกแบบกรงเล็บและกลยุทธ์เกมของคุณ
ใช้ตารางนี้เพื่อช่วยคุณกำหนดว่าคุณอยู่ในหมวดหมู่ใด
| ผู้เชี่ยวชาญ | ฉันคิดว่าฉันเข้าใจแนวคิดนี้เป็นอย่างดีและสามารถสอนเรื่องนี้ให้กับคนอื่นได้ |
| ลูกจ้างฝึกงาน | ฉันรู้สึกว่าตนเองเข้าใจแนวคิดเพียงพอที่จะแข่งขันความท้าทายนี้ได้ |
| สามเณร | ฉันรู้สึกว่าไม่เข้าใจคอนเซปต์และไม่รู้ว่าจะทำความท้าทายนี้ให้สำเร็จได้อย่างไร |
ต่อไปจะเป็นอะไร?
ในบทเรียนนี้ คุณจะได้เรียนรู้วิธีการทำงานของกรงเล็บ และออกแบบและทำซ้ำกรงเล็บสำหรับหุ่นยนต์ของคุณ คุณได้ หยิบและเคลื่อนย้ายลูกบาศก์ด้วยกรงเล็บของคุณ และแข่งขันใน Grab and Go Challenge ในบทเรียนถัดไปคุณจะ:
- เรียนรู้วิธีการทำงานของแขนหุ่นยนต์
- ศึกษาการออกแบบแขนหุ่นยนต์ประเภทต่างๆ
- ฝึกการใช้แขนหุ่นยนต์ในการยกและลดลูกบาศก์
- ร่วมแข่งขันใน Stacked Up Challenge
เลือก < กลับไปที่บทเรียน เพื่อกลับไปยังภาพรวมบทเรียน
เลือก ถัดไป บทเรียน > เพื่อไปต่อในบทเรียนที่ 3 และศึกษาการทำงานของแขนหุ่นยนต์