
競争する
まとめの振り返り
爪のデザイン を繰り返し、グラブ アンド ゴー チャレンジをプレイしたので、このレッスンで学習し実行したことを振り返ってみましょう。 エンジニアリング ノートブックで新しいページを開始して、 を始めます。
エンジニアリング ノートの次の各概念について、自分自身を 初心者、 見習い、または 専門家 として評価してください。 各コンセプトに対して 評価を付けた理由について簡単に説明してください。
- 爪の設計を設計、構築、反復する
- 爪を使って立方体を動かす
- 爪のデザインとゲーム戦略について情報に基づいた決定を下すためのスカウティング
この表は、自分がどのカテゴリに該当するかを判断するのに役立ちます。
|
専門家 |
この概念を完全に理解したので、これを他の人に教えることができたと感じています。 |
| 見習い | チャレンジに参加するのに十分なコンセプトを理解できたと感じています。 |
| 初心者 | コンセプトを理解していなかったし、課題を達成する方法がわからなかったと感じています。 |
次は何ですか?
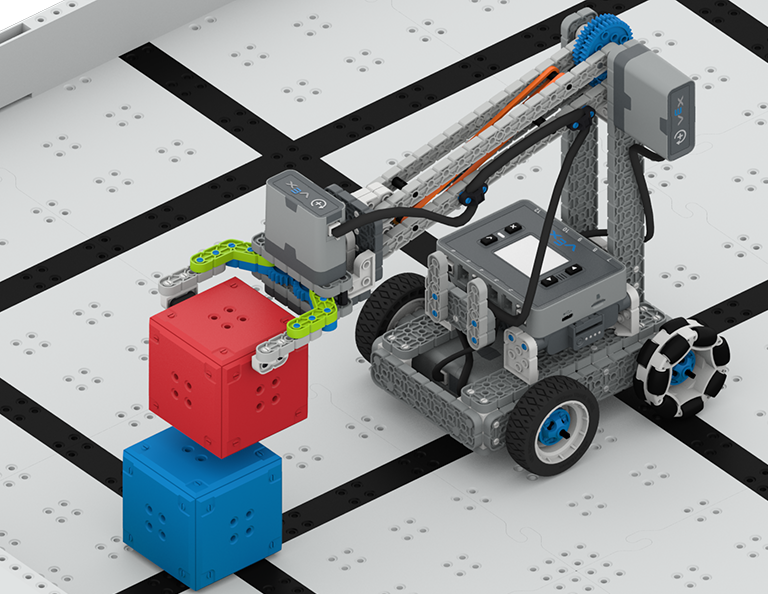
このレッスンでは、爪がどのように機能するかを学び、ロボットの爪を設計して反復しました。 あなた 、かぎ爪でキューブを拾ったり動かしたりする練習をし、グラブ アンド ゴー チャレンジに出場しました。 次のレッスンでは、次のことを行います。
- ロボットアームの仕組みを学ぶ
- さまざまな種類のロボット アームの設計を調査する
- ロボットアームを使って立方体を上げ下げする練習をする
- Stacked Up チャレンジで競う
< レッスン に戻る] を選択して、レッスンの概要に戻ります。
次のレッスン > を選択してレッスン 3 に進み、ロボット アームがどのように動作するかを調べます。