
![]() 教師用ツールボックス
-
このセクションの目的
教師用ツールボックス
-
このセクションの目的
プレイ セクションの目標は、生徒が 回転/ ブロックを使用して、自動操縦ロボットが左または右に曲がるようにプログラムする方法を学習することです。 「遊び」セクションを始めるにあたり、生徒はプログラミング動作を学びます。 次に、学生は調査を行い、自動操縦を右左折するようにプログラムする方法を学びます。 Turning の探索に進む前に、生徒と一緒にこのページを読んでください。 ディスカッションを促す質問 (Google ) を使用して、基本的な動作とは何か、そしてそれがなぜロボットをプログラミングするための基礎となるのかを生徒と一緒に確認します。
![]() 教師用ツールボックス
-
ロボットの動作
教師用ツールボックス
-
ロボットの動作
「動作」は、ロボットが何をしているのか、また何をしなければならないのかを説明するのに非常に便利な方法です。 前進する、停止する、方向転換する、障害物を探す、これらはすべて行動です。
学生がプログラミングの作業を始めるときは、ロボットの動作を動作という観点から考え始める必要もあります。 学生がプログラミングを行うときは、次の手順に従う必要があります。
-
まず、ロボットが望ましい動作を実行するための計画を立てます。
-
次に、その計画をロボットが従うことができるプログラムに変換します。
計画は単にロボットが従う必要がある一連の動作であり、プログラムはそれらの動作を VEXcode IQ ブロックに変換したものになります。
タスクを小さな行動に分割し、それらの行動を使用して解決策を構築することは、さまざまな主題に適用できるスキルです。 これも計算論的思考の一例です。 計算的思考の詳細については、こちらをご覧ください: https://k12cs.org/computational-thinking/
ロボットのように考える
人間は非常に複雑であり、非常に複雑な方法で考えることができます。 私たちは意識的に物事を考えることもありますが、無意識に考えることもあります。 呼吸をするために呼吸について考えたことがありますか? 数学の問題を解いてみるのはどうでしょうか? 次に、教室のドアから自分の席までどのように移動したかを考えてみましょう。 あらゆるステップやターンについて考えていましたか、それとも何か別のことを考えていましたか?
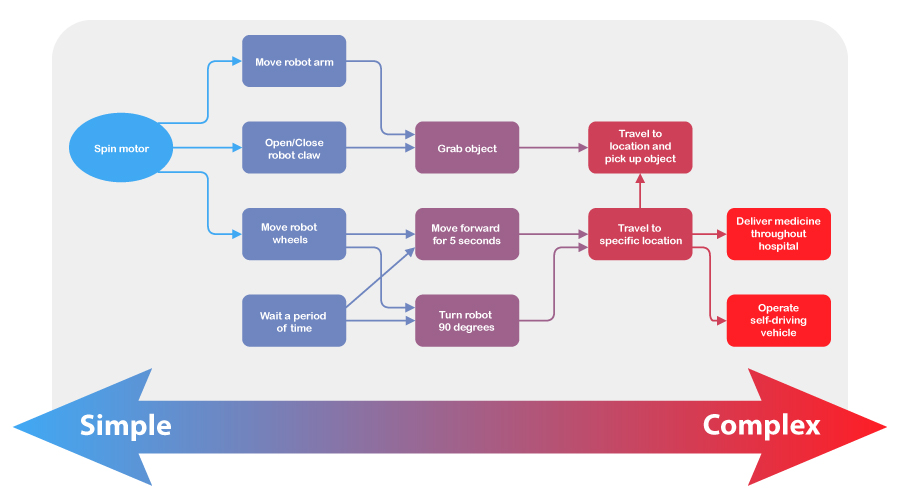
ロボットは多くのことを考えず、人間のようにロボットを助ける潜在意識を持っていません。 ロボットはプログラムされたことしか実行できません。 すべてのロボット タスクは、より単純なタスクに分類できます。これらの単純なタスクは、ロボット プログラミングの構成要素である動作として知られています。
動作はロボットの動作方法であり、ロボットの構築またはプログラムの方法に応じて、基本的なものから複雑なものまで多岐にわたります。 Autopilot のような単純な移動ロボットにはモーターが 2 つしかないため、その動作には目的を達成するためにこれらのモーターを回転させる必要があります。 オートパイロットは、前進、後進、旋回などの単純な動作を使用して、より大きなタスクを実行します。
では、どのようにしてロボットのように考えるのでしょうか? ロボットに実行してもらいたいタスクを想像してください。 次に、ロボットがそのタスクを実行するために実行する必要がある各ステップを想像してください。 これらは、タスクを達成するためにプログラムする必要がある動作です。
![]() 議論を促す
-
運転中の方向転換
議論を促す
-
運転中の方向転換
質問: 前進や後進と同じように、旋回も習得しておくべき基本的な動作です。 これらの行動を最初に学ぶことがなぜ重要だと思いますか?
A: 生徒はさまざまな答えを出すことができますが、より難しい行動に挑戦する前に、まず基本的な行動を学ぶことが重要であるという考えに基づいています。 これは、より大きな数を足すときの借用と桁上げの方法を学ぶ前に、基本的な数学の加算と減算の事実を学ぶことにたとえることができます。
質問: 一日の中で動き回っているときに、何回体勢を変えると思いますか?
回答: 生徒はどんな数字でも答えることができますが、非常に大きな数字になる可能性が高いです。 方向転換は私たち全員が頻繁に行う基本的な動作です。
質問: 考えずにできるタスクをいくつ挙げることができますか?
回答: 生徒は、呼吸や心拍など、意識的に制御できない活動のいずれかを答えることができます。 生徒は、朝の歯磨きなど、あまり考えない日課の部分で答えることもできました。 車で通勤するなどの例を挙げて、大人も同じことをすることを指摘します。 また、数学の問題を解きながら歌を口ずさむなど、生徒が一度に多くのことをできることを指摘することもできます。
![]() 学習を拡張する
-
ロボットのように考える
学習を拡張する
-
ロボットのように考える
方向転換しなければどこにも行けないのです! 生徒に教室のドアまで行って、机に座るまでに何歩、何回転するかを数えてもらいます。 学生は、ドアから座席までの経路の各部分をエンジニアリング ノートに記録し、ラベル付きの図を描くようにしてください。 この例としては次のようなものが考えられます。
-
玄関からスタート
-
8歩前に歩きます
-
左に90度曲がります
-
まっすぐ4歩歩きます
-
右に90度曲がる
-
座って下さい
生徒に自分の進路を少しずつたどらせると、ロボットが目標を達成するためにどのように移動したり回転したりするようにプログラムできるかについて考えるようになります。