
STEM LabsVEX CTE
워크셀 자동화
9 단위
6축 암 소개의 기초를 바탕으로, 이 과정은 완전한 VEX CTE 워크셀의 설정 및 자동화에 대한 내용을 계속 진행합니다. 센서, 컨베이어, 공압 장치를 통합하는 방법을 배우고 복잡한 코딩 개념을 숙지하여 물체의 이동, 분류, 팔레타이징을 완전 자동화합니다.
이 과정에는 VEX CTE 워크셀 키트가 필요합니다.
단위 1
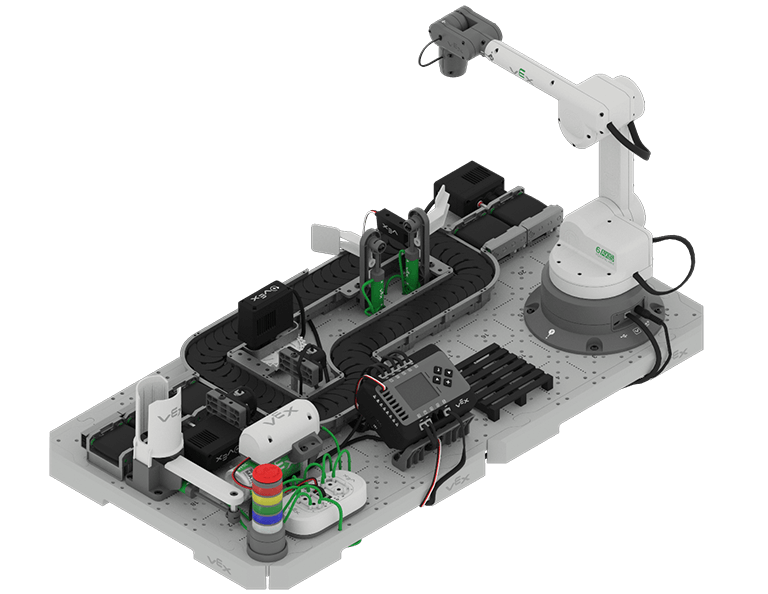
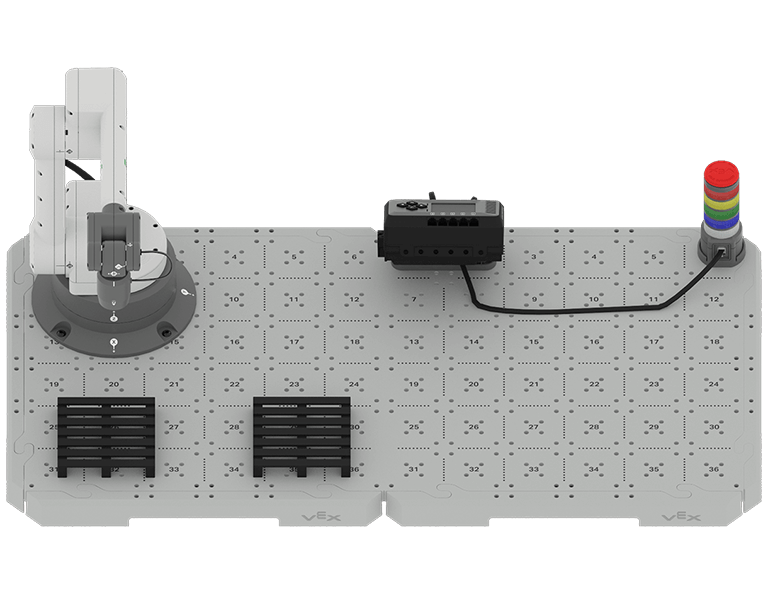
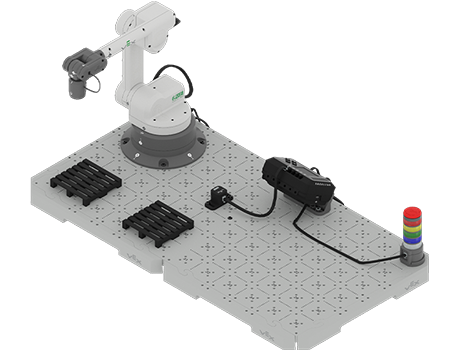
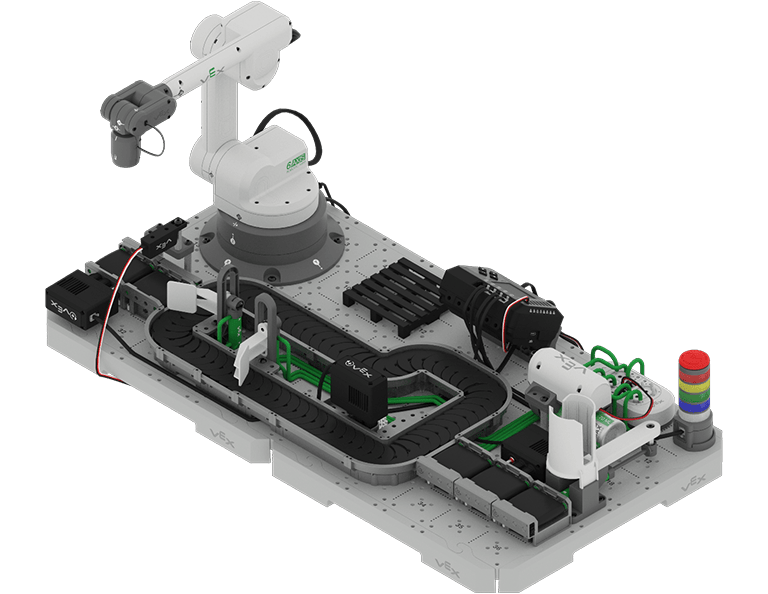
워크셀 소개
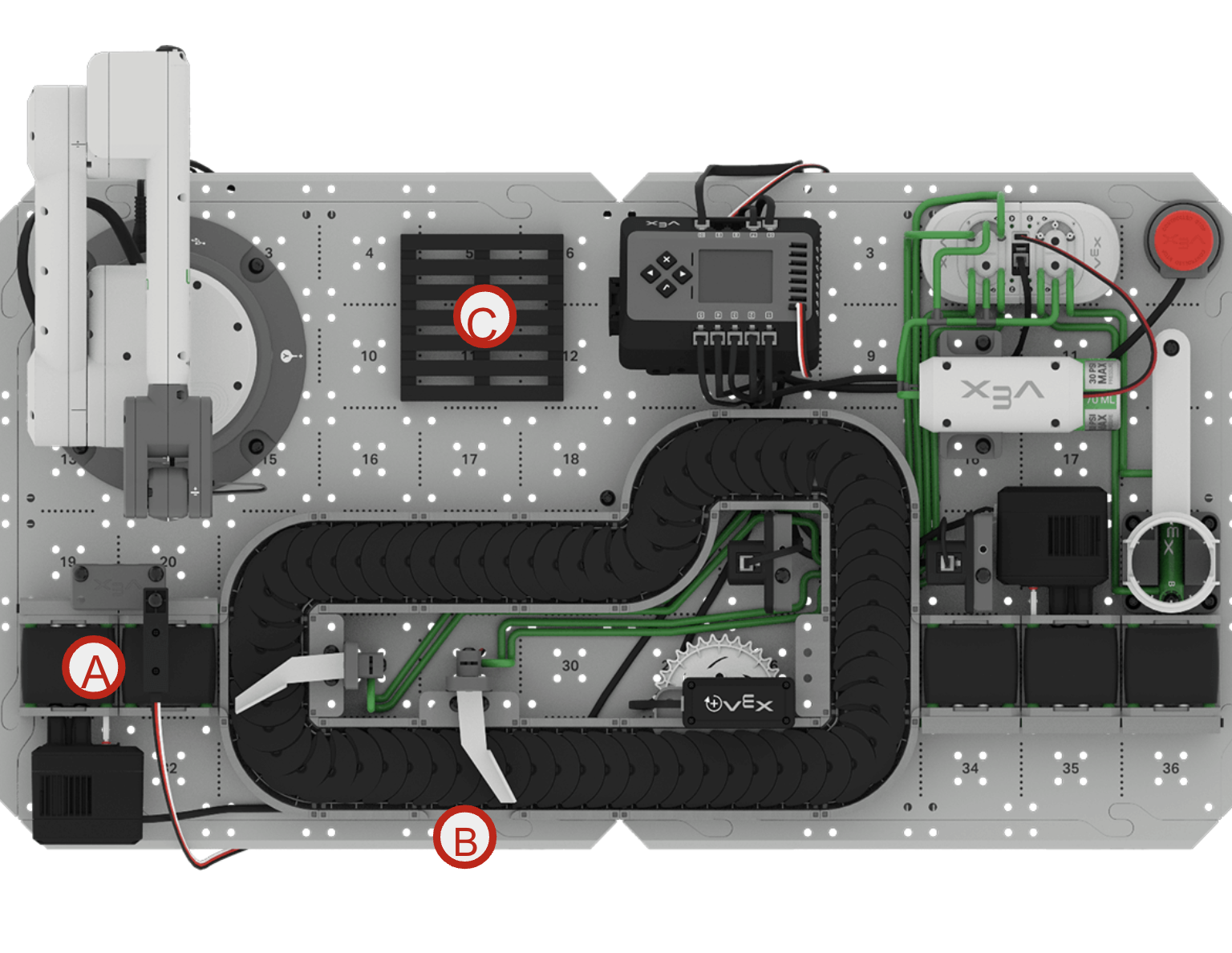
VEX CTE 워크셀을 설정하고 6축 로봇 팔과 함께 Brain을 사용하는 방법을 알아보세요.
단위 2
작업셀 안전
CTE Workcell을 사용하여 산업용 로봇의 안전 조치를 살펴보세요.
단위 3
색상별 정렬
광학 센서를 추가하고 6축 로봇팔을 코딩하여 디스크를 색상별로 분류하는 방법을 알아보세요.

단위 4
자재 운송
컨베이어를 추가하여 CTE 작업셀 주변의 객체 이동을 자동화합니다. 디스크를 로딩 구역에서 픽업 지점으로 이동하도록 모터에 코드를 입력합니다.
단위 5
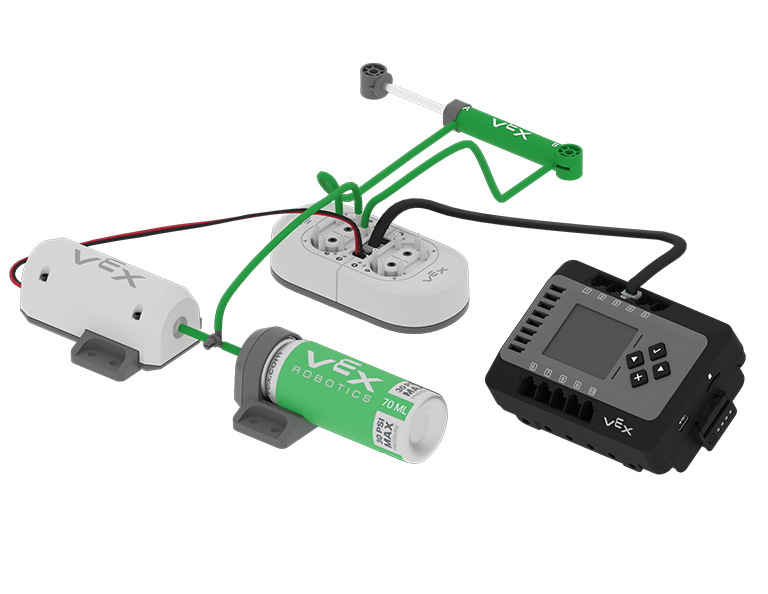
공압 이해
공압 시스템, 그 구성 요소, 그리고 산업적 응용 분야에 대해 알아보세요. 공기 흐름과 공압 회로를 탐구하기 위해 공압 테스트베드를 만들어 보세요.
단위 6
자동 분류 챌린지
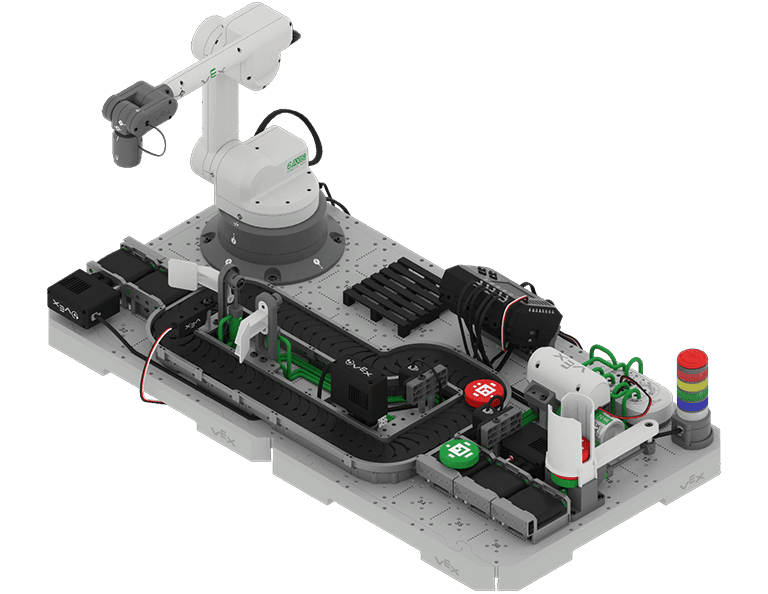
이 개방형 챌린지에서는 배운 모든 것을 실제 제품 유통 시나리오에 적용하게 됩니다. CTE 작업셀에 코드를 입력하여 제품을 두 개의 다른 적재 도크로 분류하여 운송 명세서를 이행합니다.
단위 7
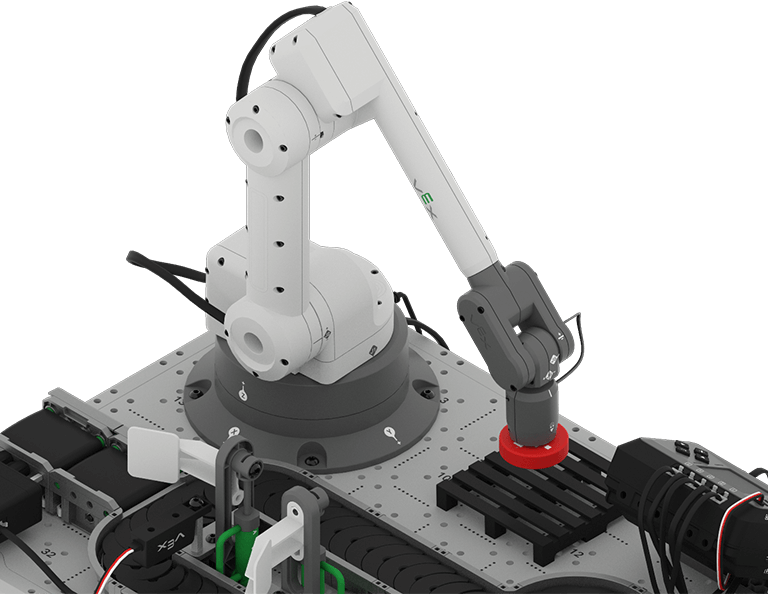
팔레트 적재 챌린지
이전 과제에서 얻은 경험을 바탕으로 6축 로봇 팔과 거리 센서를 통합하여 제품을 3개의 적재 도크로 분류해 보세요.
단위 8
광학 분류 챌린지
이전 과제를 확장하여 제품을 원하는 순서대로 정렬해 보세요. CTE 작업셀에 광학 센서를 통합하여 제품을 색상별로 분류하여 세 개의 다른 적재 도크로 보낼 수 있습니다.
관석
물류 분류 챌린지
지금까지 배운 모든 것을 현실 세계에서 가장 큰 오픈형 과제에 적용해 보세요! 두 구역에서 세 가지 유형의 제품을 분류하여 세 개의 적재 도크로 최대한 빠르고 정확하게 운송 명세서를 이행합니다.